I selve perioden 1840 er udviklingen af lineær induktionsmotor startet af Charles Wheatstone i London, men dette synes at være upraktisk. Mens der i år 1935 blev driftsmodellen udviklet af Hermann Kemper, og driftsversionen i fuld størrelse blev introduceret af Eric i år 1940. Derefter blev denne enhed anvendt i mange applikationer på tværs af mange brancher. Denne artikel giver en tydelig forklaring på lineær Induktionsmotor , dets arbejdsprincip, ydeevne, design, konstruktion, fordele og ulemper og større anvendelser. Lad os dykke ned i konceptet.
Hvad er en lineær induktionsmotor?
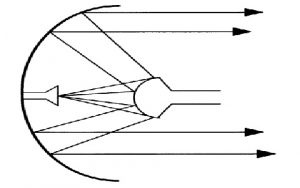
Lineær induktionsmotor forkortes som LIM, og dette er den forbedrede version af den roterende induktionsmotor, hvor output er lineær translationel bevægelse i stedet for roterende bevægelse. Denne enhed genererer lineær bevægelse og anden kraft end det roterende drejningsmoment. Designet og funktionaliteten af det lineære induktion motor kan vises i nedenstående figur ved at skabe et radikalt formet snit i den roterende induktion og således udjævne sektionen.
Outputtet er en nivelleret stator eller oversiden med jernbelagte lamineringer, hvor disse bærer trefasede multiple poler, der vikles med ledere, der er i 900vinkler til bevægelsesretningen. Det består også af egern lukket type vikling, hvorimod det generelt er inkluderet i et uendeligt aluminium eller kobberfremstillet ark, der holdes på solidt belagt jernstøtte.
Uanset enhedsnavnet genererer ikke alle de lineære induktionsmotorer lineær bevægelse, kun få af enhedens generering bruges til at levere omdrejninger med store diametre, og brugen af de endeløse primære sektioner er dyrere.
Design
Den grundlæggende konstruktion og lineær induktionsmotordesign svarer næsten det samme som trefaset induktion motor, selvom det ikke ser ud som en normal induktionsmotor. Når der dannes et snit i statorsektionen af polyfase-induktionsmotoren og placeres på en plan overflade, skaber dette den primære sektion af den lineære induktionsmotor. På samme måde, når der dannes et udskåret os i rotorsektionen af polyfaseinduktionsmotoren og placeres på en plan overflade, skaber dette den sekundære sektion af den lineære induktionsmotor.
Lineær induktionsmotorkonstruktion Derudover findes der en anden model af den lineære induktionsmotor, der bruges til forbedring af ydeevnen, og dette kaldes DLIM, som er en dobbeltsidet lineær induktionsmotor. Denne model har et primært afsnit, der er placeret i en anden ende af det sekundære afsnit. Dette design bruges til at forbedre udnyttelsen af flux på både den primære og den sekundære side. Dette er konstruktion af en lineær induktionsmotor .
Arbejdsprincip for lineær induktionsmotor
Nedenstående afsnit giver en klar forklaring af bearbejdning af lineær induktionsmotor .
Her, når den primære sektion af motoren aktiveres ved hjælp af en afbalanceret trefaset effekt, vil der være strømningsbevægelser over hele længden af den primære sektion. Denne lineære bevægelse af magnetfeltet er lig med det roterende magnetfelt i statorafsnittet i den trefasede induktionsmotor.
Med dette vil der være induktion af elektrisk strøm i lederne af sekundærviklingen på grund af komparativ bevægelse mellem lederen og fluxbevægelse . Den strøm, der induceres, kommer i forbindelse med fluxbevægelsen for at generere enten lineær kraftkraft, og dette vises af
Vs = 2tfs m / sek
Når den primære sektion er lavet til at være konstant, og den anden sektion har bevægelse, trækker kraften den sekundære sektion i sig selv, og dette resulterer i dannelsen af nødvendig retlinet bevægelse. Når der tilføres en strømforsyning til systemet, vil det genererede felt tilvejebringe et lineært bevægelsesfelt, hvor hastigheden er repræsenteret ifølge den ovennævnte ligning.
I ligningen svarer 'fs' til mængden af forsyningsfrekvensmål i Hz
'Vs' svarer til det lineære bevægelsesfelt målt i m / sek
'T' svarer til stigningen på den lineære pol, hvilket betyder afstanden mellem pol og pol målt i meter
V = (1-s) Vs
I overensstemmelse med den samme begrundelse, i tilstanden af induktionsmotor, holder den sekundære løber ikke den samme hastighed som hastighedsværdien af magnetfelt . På grund af dette genererer der en slip.
Det lineært induktionsmotordiagram er vist som følger:

Karakteristika for lineær induktionsmotor
Et par af LIM-karakteristika er:
Sluteffekt
I modsætning til motorens cirkulære induktionstype har LIM en egenskab kaldet 'End Effect'. Sluteffekten består af effektivitets- og ydelsestab, som er en konsekvens af magnetisk energi, der føres væk og falder ved slutningen af den primære sektion gennem den relative bevægelse af den primære og sekundære sektion.
Kun med den sekundære sektion synes enhedens funktionalitet at være den samme som den roterende maskine, krævet, at den er næsten to poler fra hinanden, men med en minimal primær reduktion i tryk, som sker ved lav glidning, er det stadig 8 eller mere stænger længere. Da der findes sluteffekter, har LIM-enheder ikke evnen til at køre lys, mens den generelle form for induktionsmotorer har denne evne til at betjene motoren med et tættere synkronfelt under minimale belastningsforhold. Modsat dette genererer sluteffekten tilsvarende tab med lineære motorer.
Stød
Drevet, der er forårsaget af LIM-enhederne, er næsten det samme som for generelle induktionsmotorer. Disse drivkræfter repræsenterer en omtrent samme karakteristiske kurve, det samme som slip, selvom det er moduleret af sluteffekterne. Dette betegnes også som en Tractive-indsats. Det vises af
F = Pg / Vs målt i Newton
Levitation
I modsætning til den roterende motor har LIM-indretninger desuden en elektrodynamisk levitationskraft, der har nul aflæsning ved '0' glidning, og dette genererer en omtrent fast mængde mellemrum, når gliden forbedres i en af retningerne. Dette finder kun sted i ensidede motorer, og denne egenskab vil normalt ikke ske, når der anvendes en jernstøtteplade til den sekundære sektion, fordi dette skaber en tiltrækning, der overvinder løftetrykket.
Tværgående kanteffekt
Lineære induktionsmotorer udviser også en tværgående kanteffekt, som er, at de nuværende stier, der er i samme bevægelsesretning, udvikler tab, og på grund af disse stier vil der være en reduktion i den effektive fremdrift. Som på grund af denne tværgående effekt finder sted.
Ydeevne
Det ydeevne for den lineære induktionsmotor kan være kendt af den nedenfor forklarede teori, hvor den synkrone hastighed for den bevægelige bølge er repræsenteret af
Vs = 2f (liniepolens pithøjde) …… ..m / s
'F' svarer til den leverede frekvens målt i Hertz
I tilfælde af en roterende induktionsmotor er hastigheden af den sekundære sektion i LIM mindre end den synkrone hastighed og er givet ved
Vr = Vs (1-s), ‘s’ er LIM-slip, og det er det
S = (Vs - Vr) / Vs
Den lineære kraft er givet ved
F = effekt af luftspalten / Vs
Drivhastighedskurveformen for LIM er næsten identisk med den for omdrejningsinduktionsmotorens hastighed v / s drejningsmomentkurve. Når der er en sammenligning mellem LIM og roterende induktionsmotor, har den lineære induktionsmotor brug for et øget luftspalte, og på grund af dette vil der være øget magnetiseringsstrøm, og faktorer som ydelse og effektfaktor vil være minimale.
I tilfælde af RIM er arealet af stator- og rotorsektionerne ens, mens det i LIM er en kortere end den anden sektion. Ved konstant hastighed vil den kortere sektion have kontinuerlig passage end den anden.
Fordele og ulemper
Det fordelene ved den lineære induktionsmotor er:
De afgørende fordele ved LIM er:
- Der eksisterer ingen magnetiske tiltrækningskræfter på samlingstidspunktet. Af den grund, at LIM-enheder ikke har permanente magneter, eksisterer der ingen tiltrækningskraft på tidspunktet for systemmontering.
- Lineære induktionsmotorer har også den fordel, at de kører lange længder. Disse enheder er hovedsageligt implementeret til applikationer med lang længde, fordi sekundære sektioner ikke er inkluderet med permanente magneter. Manglende eksistens af magneter i det andet afsnit tillader, at disse enheder ikke er dyre, fordi prisen på enheden afgørende ligger i udviklingen af et magnetisk spor.
- Effektivt anvendelig til tunge formål. Lineære induktionsmotorer bruges primært under højtryks lineære motorforhold, hvor de er til stede med stabile kraftværdier på næsten 25 g accelerationer og nogle hundrede pund.
Det ulemper ved lineær induktionsmotor er:
- Konstruktionen af LIM-enheder er noget kompliceret, da de kræver sofistikerede kontrolalgoritmer.
- Disse har øget tiltrækningskræfterne på operationstidspunktet.
- Viser ingen kraft på stilstandstidspunktet.
- Enhedens forbedrede fysiske størrelse betyder, at emballagestørrelsen er mere.
- Kræver mere strøm til funktionalitet. Sammenlignet med permanente magneter lineære motorer er effektiviteten mindre og genererer mere varme. Dette kræver yderligere, at vandkøleenheder skal medtages i konstruktionen.
Anvendelser af lineær induktionsmotor
Den eksklusive anvendelse af lineære induktionsmotorer kan findes i applikationer som f.eks
- Metalliske transportbånd
- Mekanisk kontroludstyr
- Aktuatorer til afbrydere med høj hastighed
- Shuttle boosting applikationer
Alt i alt handler det kun om konceptet med lineære induktionsmotorer. Denne artikel har givet en klar forklaring på lineære induktionsmotorprincipper, design, arbejde, anvendelser, fordele og ulemper. Det er yderligere nødvendigt at vide, hvordan hastigheden v / s polhældning egenskaber i lineær induktionsmotor udføre?