Artiklen præsenterer et simpelt elektrisk scooter-kredsløbsdesign, som også kan modificeres til at lave en elektrisk auto-rickshaw. Ideen blev anmodet af Mr. Steve.
Circuit Request
Jeg var heldig nok til at finde din blog, virkelig fantastiske ting, som du har formået at designe.
Jeg leder efter en DC til DC Step Up og controller til elektrisk scootermotor
Input: SLA (forseglet blysyre) Batteri 12V, der er ~ 13,5V opladet
mindste spænding - afskåret ved ~ 10,5V
Udgang: 60V DC motor 1000W.
Har du stødt på et sådant kredsløb?
Jeg kan forestille mig, at det vil være push-pull-type, men har ingen idé om typer mosfeter (give wattforbrug 80-100A), køre dem, derefter transformeren, kernetypen og derefter dioder.
Plus minimumsspændingen afbrudt for at dække PWM's driftscyklus.
Jeg har fundet nogle flere oplysninger. Motoren er 3-faset børsteløs med hall-sensorer.
Der er to måder at nærme sig det på, a / lader den eksisterende controller være på plads og kun træder 12V til 60V op eller b / udskifter også controlleren.
Der vil ikke være nogen forskel i energieffektivitet, controlleren skifter blot hvilken fase der får strøm baseret på hallsensorerne. Derfor holder vi sig til plan a.
Mange tak,
Steve

Designet
I dag er det meget lettere at fremstille et el-køretøj, end det tidligere var, og dette er blevet muligt på grund af to hovedelementer i designet, nemlig BLDC-motorerne og Li-ion- eller Li-polymer-batterierne.
Disse to ultraeffektive medlemmer har grundlæggende tilladt konceptet med elektriske køretøjer at blive en realitet og praktisk gennemførlig.
Hvorfor BLDC Motor
BLDC-motoren eller den børsteløse motor er effektiv, fordi den er designet til at køre uden fysiske kontakter undtagen kuglelejerne på akslen.
I BLDC-motorer roterer rotoren udelukkende gennem magnetisk kraft, hvilket gør systemet ekstremt effektivt, i modsætning til de tidligere børstede motorer, som havde sine rotorer fastgjort med forsyningskilden gennem børster, hvilket forårsager meget friktion, gnistdannelse og slitage i systemet.
Hvorfor Li-Ion batteri
På lignende linjer, med fremkomsten af de meget opgraderede Li-ion-batterier og Lipo-batterierne i dag, opnås ikke længere strøm fra batterier som et ineffektivt koncept.
Tidligere havde vi kun blybatterier til rådighed for alle DC-backup-systemer, der udgjorde to store ulemper: Disse modstykker havde brug for meget tid til at oplade, havde begrænset afladningshastighed, lavere levetid og var omfangsrige og tunge, alt dette tilføjede kun til deres ineffektive arbejde.
I modsætning til dette er Li-ion- eller Li-po-batterier lettere, kompakte, hurtigt opladelige ved høje strømhastigheder og kan aflades ved enhver ønsket høj strømhastighed, disse har højere levetid, er SMF-typer, alle disse funktioner gør dem til den rette kandidat til applikationer såsom elektriske scootere, elektriske rickshawer, quadcopter droner etc.
Selvom BLDC-motorer er ekstremt effektive, kræver disse specialiserede IC'er til at drive deres statorspoler, i dag har vi mange producenter, der producerer disse eksklusive næste generations IC-moduler, som ikke kun har den grundlæggende funktion til at betjene disse motorer, men er også specificeret med mange avancerede ekstra funktioner, såsom: PWM-åben sløjfekontrol, sensorassisteret lukket sløjfekontrol, flere idiotsikre beskyttelsesforanstaltninger, motor baglæns / fremadgående kontrol, bremsekontrol og en lang række andre avancerede indbyggede funktioner.
Brug af et BLDC Driver Circuit
Jeg har allerede diskuteret en sådan fremragende chip i mit tidligere indlæg, specielt designet til håndtering af BLDC-motorer med høj effekt, det er MC33035 IC fra Motorola.
Lad os lære, hvordan dette modul kan implementeres effektivt til fremstilling af en elektrisk scooter eller en elektrisk rickshaw lige i dit hjem.
Jeg vil ikke diskutere de mekaniske detaljer i køretøjet, snarere kun det elektriske kredsløb og ledningsdetaljerne i systemet.
Kredsløbsdiagram

Liste over dele
Alle modstande inklusive Rt men undtagen Rs og R = 4k7, 1/4 watt
Ct = 10nF
Hastighedspotentiometer = 10K Lineær
Øvre effekt BJT'er = TIP147
Nedre Mosfets = IRF540
Rs = 0,1 / maks. Statorstrømkapacitet
R = 1K
C = 0,1 uF
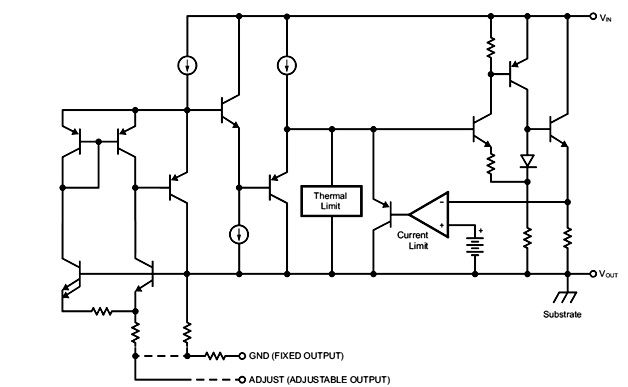
Ovenstående figur viser en fuldgyldig børsteløs 3-fas DC-motordriver IC MC33035 med høj effekt, som bliver perfekt egnet til den foreslåede elektriske scooter eller elektriske rickshaw-applikation.
Enheden har alle de grundlæggende funktioner, der kan forventes at være i disse køretøjer, og hvis det er nødvendigt, kan IC forbedres med yderligere avancerede funktioner gennem mange alternative mulige konfigurationer.
De avancerede funktioner bliver specifikt mulige, når chippen er konfigureret i lukket sløjfetilstand, men den diskuterede applikation er en åben sløjfekonfiguration, som er en mere foretrukken konfiguration, da den er meget ligetil at konfigurere og alligevel er i stand til at opfylde alle de krævede funktioner der kan forventes i et elektrisk køretøj.
Vi har allerede diskuteret pinout-funktionerne på denne chip i det foregående kapitel, lad os sammenfatte det samme og også forstå, hvordan nøjagtigt ovennævnte IC kan kræves implementeret for at opnå de forskellige operationer, der er involveret i et elektrisk køretøj.
Sådan fungerer IC
Den grønne skraverede sektion er selve MC 33035 IC, der viser alle de indbyggede sofistikerede kredsløb indlejret inde i chippen, og hvad der gør den så avanceret med sin ydeevne.
Den gule skraverede del er motoren, som inkluderer en 3-faset stator angivet med de tre spoler i 'Delta' konfiguration, den cirkulære rotor angivet med N / S polede magneter og tre Hall-effekt sensorer øverst.
Signalerne fra de tre Hall-effektsensorer føres til stiften nr. 4, 5, 6 på IC'en til intern behandling og generering af den tilsvarende udgangsskiftesekvens på tværs af de tilsluttede udgangseffektenheder.
Pinout-funktioner og kontrolelementer
Pinouts 2, 1 og 24 styrer de eksternt konfigurerede øvre effektanordninger, mens benene 19, 20, 21 er tildelt til at styre de supplerende nedre seriens power-enheder. som sammen styrer den tilsluttede BLDC-bilmotor i henhold til de forskellige fødekommandoer.
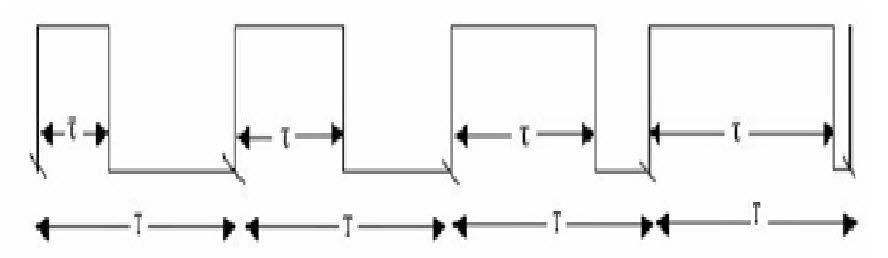
Da IC er konfigureret i en åben sløjfetilstand, skal den aktiveres og styres ved hjælp af eksterne PWM-signaler, hvis driftscyklus skal bestemme motorens hastighed.
Denne smarte IC kræver dog ikke et eksternt kredsløb til at generere PWM'erne, men det håndteres snarere af en indbygget oscillator og et par fejlforstærkerkredsløb.
Rt- og Ct-komponenterne er passende valgt til at generere frekvensen (20 til 30 kHz) for PWM'erne, som tilføres til pin nr. 10 på IC'en til yderligere behandling.
Ovenstående sker gennem en 5V forsyningsspænding genereret af selve IC'en ved pin # 8, denne forsyning bruges samtidig til at fodre Hall-effekt-enhederne, det ser ud til, at alt er præcist gjort her .... intet spildes.
Den del, der er skygget med rødt, udgør konfigurationen for hastighedskontrol, som det ses, er den simpelthen lavet ved hjælp af et enkelt almindeligt potentiometer .... skubber det opad forøger hastigheden og omvendt. Dette er igen muliggjort gennem de tilsvarende varierende PWM-driftscyklusser over hele pin nr. 10, 11, 12, 13 .
Potentiometeret kunne konverteres til et LDR / LED-samlingskredsløb for at opnå en friktionsfri pedalhastighedskontrol i køretøjet.
Pin nr. 3 er til bestemmelse af den forreste, omvendte retning af motorrotationen eller rettere scooteren eller rickshawretningen. Det indebærer, at din elektriske scooter eller din elektriske rickshaw nu vil have mulighed for at vende tilbage ... forestil dig bare en tohjulet med en reverse-facilitet, ..... interessant?
Pin nr. 3 kan ses med en kontakt, når denne kontakt lukkes, gør stiften nr. 3 til jorden, hvilket muliggør en 'fremad' bevægelse til motoren, mens den åbnes, får motoren til at dreje i den modsatte retning (pin3 har en intern pull-up-modstand, så åbning kontakten forårsager ikke noget skadeligt for IC).
Identisk vælger pin # 22 switch faseforskydningssignalrespons for den tilsluttede motor, denne switch skal tændes eller slukkes hensigtsmæssigt med henvisning til motorspecifikationerne. Hvis der anvendes en 60 graders motor, skal kontakten forblive lukket , og åben for en 120 graders motor.
Pin nr. 16 er jordstiften på IC'en og skal forbindes med batteriets negative linje og / eller den fælles jordledning, der er knyttet til systemet.
Pin nr. 17 er Vcc, eller den positive indgangsstift, skal denne pin tilsluttes en forsyningsspænding mellem 10V og 30V, 10V er minimumsværdien og 30V den maksimale nedbrydningsgrænse for IC.
Pin nr. 17 kan integreres med 'Vm' eller motorforsyningsledningen, hvis motorforsyningsspecifikationerne svarer til IC Vcc-specifikationerne, ellers kunne pin17 leveres fra et separat regulatorstrin til trin ned.
Pin nr. 7 er 'aktiv' pinout af IC, denne pin kan ses afsluttet til jorden via en switch, så længe den er tændt, og pin nr. 7 forbliver jordet, får motoren lov til at forblive aktiveret, når den er slukket, motoren er deaktiveret, hvilket resulterer i, at motoren kører, indtil den endelig stopper. Friløbstilstanden kan hurtigt stoppe, hvis motoren eller køretøjet er under en vis belastning.
Pin nr. 23 er tildelt 'bremseevnen' og får motoren til at stoppe og standse næsten øjeblikkeligt, når den tilknyttede kontakt åbnes. Motoren får lov til at køre normalt, så længe denne kontakt holdes lukket, og stiften # 7 holdes jordforbundet.
Jeg vil anbefale at samle kontakten ved pin nr. 7 (aktiver) og pin nr. 23 (bremse) sammen, så disse skiftes med dobbelt handling, og sammen vil dette sandsynligvis hjælpe med at 'dræbe' motorrotationen effektivt og kollektivt og gør det også muligt for motoren at køre med et kombineret signal fra de to pnouts.
'Rs' danner sense-modstanden, der er ansvarlig for at kontrollere motorens overbelastning eller over aktuelle forhold under sådanne situationer. 'fejl'-tilstanden udløses øjeblikkeligt, når motoren straks slukkes, og IC'en går i en lock-out-tilstand internt. Tilstanden forbliver i denne tilstand, indtil fejlen er rettet, og normaliteten er gendannet.
Dette afslutter den detaljerede forklaring vedrørende de forskellige pinouts for den foreslåede pinouts for elektrisk scooter / rickshaw kontrolmodul. Det skal bare implementeres korrekt i henhold til den viste forbindelsesinfo i diagrammet for succesfuld og sikker implementering af køretøjets operationer.
Derudover inkluderer IC MC33035 også et par indbyggede beskyttelsesfunktioner såsom spærring under spænding, der sikrer, at køretøjet er slukket, hvis IC'et forhindres fra den krævede minimale forsyningsspænding, og også en termisk overbelastningsbeskyttelse, der sikrer at IC aldrig arbejder med over temperaturer.
Sådan tilsluttes batteriet (strømforsyning)
I henhold til anmodningen er det elektriske køretøj specificeret til at arbejde med en 60V-indgang, og brugeren anmoder om en boost-konverter for at opnå dette højere spændingsniveau fra et mindre 12V eller et 24V batteri.
Tilføjelse af en boost-konverter kan dog unødigt gøre kredsløbet mere komplekst og muligvis øge en mulig ineffektivitet. Den bedre idé er at bruge 5no 12V batterier i serie. For tilstrækkelig sikkerhedskopieringstid og strøm til 1000 watt motor kunne hvert batteri blive bedømt til 25AH eller mere.
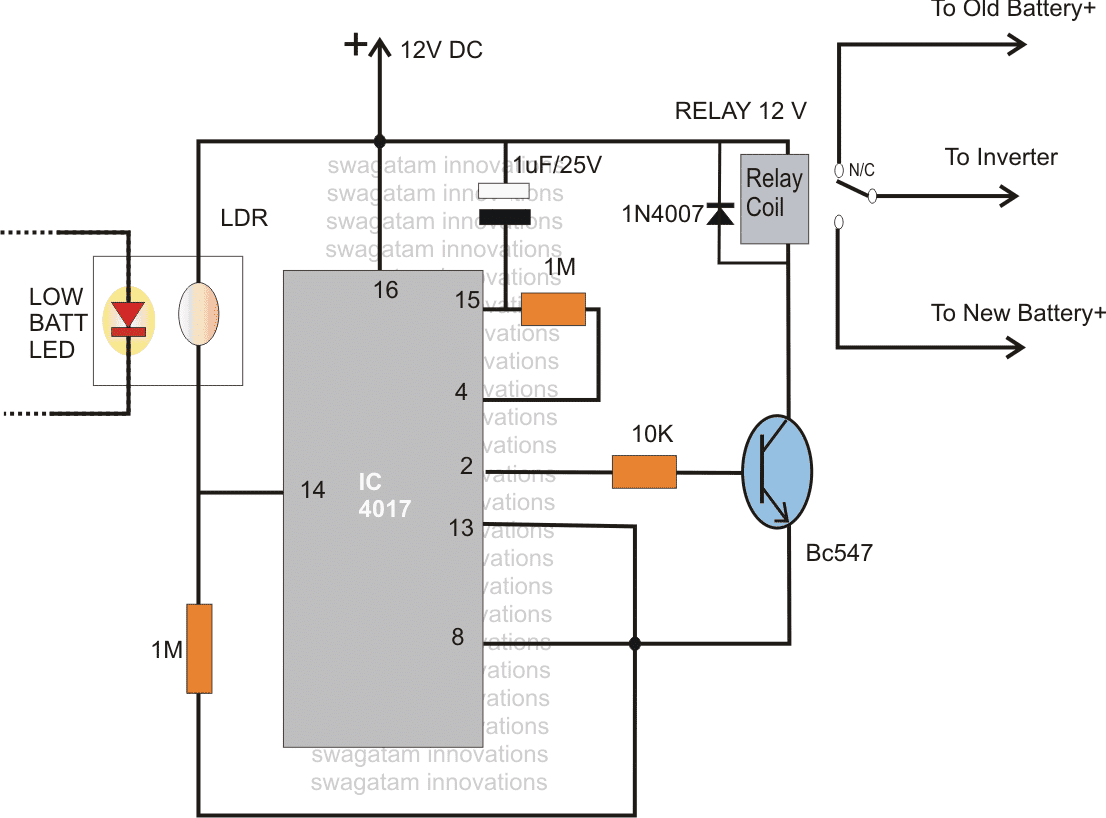
Ledningsføring af batterierne kan implementeres ved at henvise til følgende forbindelsesoplysninger:

Forrige: High Wattage børsteløs motorstyringskreds Næste: Hvordan Boost-konvertere fungerer