I dette indlæg vil vi diskutere det grundlæggende i quadcopter-kropssamling ved hjælp af aluminiumsrør og -bolte, i de senere afsnit af artiklen vil vi også diskutere et simpelt dronekredsløb, der kan bruges til at flyve en lille droneenhed uden at være afhængig af komplekse mikrokontroller.
En quadcopter er måske den enkleste flyvemaskine, der kræver mindst mulig aerodynamisk nøjagtighed og komplikationer, og det er derfor ikke nogen overraskelse, det kunne vinde en enorm popularitet blandt de forskellige hobbyister, der med succes kunne bygge dette ... en maskine, som de faktisk kunne flyve og kontrol efter eget valg.
Quadcopter Dynamics
Det faktum, at en quadcopter-drone er den enkleste med hensyn til teknisk og dynamik, skyldes faktisk inddragelsen af 4 propeller og en afbalanceret rammestruktur, som gør det muligt for maskinen at flyve med relativt god ligevægt, selv under vanskelige klimatiske forhold.
Men enkelhed indebærer også, at systemet muligvis ikke er så effektivt som de konventionelle fly- og helikoptermodeller, der er kompliceret designet til at udvise ekstrem effektivitet med hensyn til hastighed og brændstofforbrug, og selvfølgelig bærende kapacitet ... alle disse kunne i det væsentlige være mangler et typisk quadcoptersystem.
Ikke desto mindre, hvad angår et hobbyprojekt, bliver denne maskine det ideelle valg for de fleste entusiaster, der finder det meget morsomt og spændende at bygge en egen flyvemaskine derhjemme, som i sidste ende 'lytter' og flyver til den retning, brugeren foretrækker, at den flytter.
For en ny spiller, der måske teknisk set ikke er så informeret, kan selv denne enkle maskine finde ekstremt kompliceret at forstå, simpelthen fordi de fleste af de relaterede oplysninger, der præsenteres på tværs af de mange websteder, ikke diskuterer begrebet klart og på et 'sprog', der kan passe en lægmand.
Denne artikel er specielt skrevet til de ikke så tekniske folk, der er interesserede i at bygge en storslået flyvemaskine, men finder emnet for svært at fordøje.
Hvorfor quadcoptere er så nemme at bygge i dag
Har du nogensinde spekuleret på, hvorfor quadcopters og droner er så lette at konstruere i nutidens verden og måske var umulige tidligere ved hjælp af elektricitet?
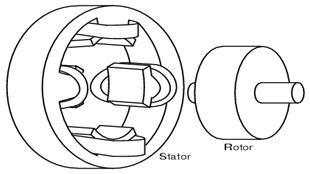
Det er grundlæggende på grund af udviklingen og forbedringen af Li-Ion-batterierne. Disse er ekstremt effektive former for batterier, der er tilgængelige i dag, og som tilbyder imponerende effekt / vægt-forhold. Sammen med dette har opfindelsen af BLDC-motorer og stærkt raffinerede permanente magnetmotorer også bidraget til at gøre dronerne let konstruerbare.
Li-Ion-batteriet er i stand til at levere en enorm mængde drejningsmoment på motorerne, der bliver tilstrækkelig nok til at skubbe quadcopter-enheden til en høj højde over jorden inden for få sekunder og tillader det også at forblive luftbåret i lang tid, hvilket gør ydeevnen meget effektiv og nyttig.
Hvordan Quadcopter flyver
Lad os nu springe rigtigt og forstå, hvad der er de væsentlige ting, der kræves for at få en quadcopter til at flyve med succes. Her er det grundlæggende for at få maskinen til at flyve problemfrit:


1) Grundlæggende kræver maskinen en fast og stærk krop, men ekstremt let i vægt. Dette kunne fremstilles eller samles ved hjælp af hule firkantede aluminiumsekstruderingsrør ved passende boring af huller og fastgørelse af rammen med møtrikker og bolte.
2) Strukturen skal være i form af et perfekt '+' eller et perfekt 'x', det gør ikke en forskel, så længe vinklen mellem de 'krydsende' rør er 90 grader hver.

Grundlæggende elementer, der er nødvendige til konstruktion af en quadcopter, kan ses på følgende billede:

Delsamlingssimulering
Den grove animerede simulering nedenfor viser, hvordan man samler de ovennævnte viste elementer sammen:

Sådan konstrueres Quadcopter Framework
Aluminium til '+' rammen kan anskaffes ved passende skæring og dimensionering af færdiglavet aluminium ekstruderingsrør, som vist nedenfor:

Rammens størrelse er relativ og er derfor ikke afgørende. Du kan bygge en bred ramme med motorerne monteret bredt fra hinanden eller bygge en ret kompakt rammekonstruktion, hvor motorerne ikke er for brede fra hinanden ... selvom det skal sikres, at propeller er langt fra hinanden for at muliggøre bedre ligevægt og balance.
3) '+' rammekonstruktionen skal være udstyret med en firkantet platform i det midterste afsnit, hvor rammearmene mødes og krydser hinanden. Det kunne simpelthen være en velpoleret aluminiumsplade, der er passende dimensioneret til komfortabelt at rumme al den nødvendige elektronik og ledninger.
Således er denne centrale plade eller platformen grundlæggende påkrævet til installation og husning af systemets elektronik, som i sidste ende vil være ansvarlig for at kontrollere din quadcopter.
4) Når ovenstående ramme er afsluttet, skal motorerne fastgøres på tværs af enderne af tværstængerne, som vist i ovenstående figurer.
5) Det er unødvendigt at sige, at alt tilpasningsarbejde skal udføres med den største nøjagtighed og perfekt tilpasning, dette kan kræve tilknytning af en erfaren fabrikant til jobbet.
Da alt i designet er parvis, vil det ikke være for svært at tilpasse elementerne nøjagtigt, det handler bare om at dimensionere og montere parrene med så meget lighed som muligt, hvilket igen vil sikre et maksimalt niveau af balance, ligevægt og synkronisering til systemet.
Når rammen er bygget, er det tid til at integrere de elektroniske kredsløb med de relevante motorer. Dette skal gøres i henhold til instruktionerne i den givne kredsløbsmanual.
Kredsløbene kunne monteres på undersiden af den centrale plade med passende hus eller over pladen, igen med et passende kabinet til at omslutte det tæt.

Forståelse af propellernes rotationsretning
Analyse af motorens propellers rotationsretning for en afbalanceret løftning af:
Idet der henvises til ovenstående animerede simulering, skal motorens propellers drejningsretning justeres på følgende måde:
Det skal simpelthen være sådan, at motorerne i endernes ender skal være identiske, men forskellige med den anden stangmotorretning, hvilket betyder, at hvis en stang har motorerne, der drejer med uret, supplerer motorerne i enderne af den anden stangen skal være indstillet til at dreje mod uret. retning.
Se simuleringen ovenfor for korrekt at forstå den modvirkende bevægelse af motorerne, der muligvis skal tildeles motorerne for at sikre en afbalanceret optagelse af
Sådan styres retningen af quadcopteren ved at kontrollere motorernes hastighed.
Ja, quadcopters flyretning kan finjusteres og styres efter eget ønske og vilje ved simpelthen at anvende forskellige hastigheder (RPM) på de pågældende motorer.
De følgende billeder viser, hvordan den grundlæggende hastighedstransmission kan anvendes på de relevante motorer for at opnå og udføre enhver ønsket flyretning til maskinen:




Som angivet i ovenstående diagrammer kan quadcopteren ved at nedsætte hastigheden af et sæt motorer eller øge hastigheden af det modsatte sæt motorer eller tilpasse hastighederne efter deres egne præferencer at rejse i luften i enhver ønsket specifik retning.
Ovenstående billeder angiver de grundlæggende retninger, såsom fremad, baglæns, højre, venstre osv ... men enhver anden ulige retning kan også implementeres effektivt ved passende justering af de relevante motorers hastigheder eller kan kun være en enkelt motor.
For eksempel for at tvinge maskinen til at flyve mod N / W-retningen kan hastigheden af kun S / E-motoren øges, og for at gøre det muligt for maskinen at flyve i N / E-retning, kan hastigheden af S / E W motor kan øges ... og så videre. Det skal bare øves, indtil den fulde kontrol med quadcopter bliver opnåelig og mestret af brugeren.
Design af en praktisk quadcopter
Indtil videre har vi lært om den grundlæggende konstruktion af drone kroppen og hardware, lad os nu lære at lave en quadcopter eller et drone kredsløb hurtigt og billigt ved hjælp af meget almindelige komponenter. I et af mine tidligere indlæg lærte vi, hvordan man laver en relativt kompleks og derfor effektiv quadcopter-flyvemaskine uden at bruge mikrocontroller, for mere info vil du gerne gennemgå følgende indlæg:
Fjernbetjeningskredsløb uden MCU | Elektronisk kredsløb
I denne artikel forsøger vi at gøre ovennævnte design meget enklere ved at fjerne de børsteløse motorer og erstatte den med børstede motorer og dermed gøre det muligt at slippe af med komplekset BLDC driver kredsløbsmodul .
Da quadcopters mekaniske konstruktionsdetaljer allerede er diskuteret ovenfor, vil vi kun beskæftige os med kredsløbsdesign sektionen og lære, hvordan den kan bygges til at flyve det foreslåede enkleste drone kredsløb.
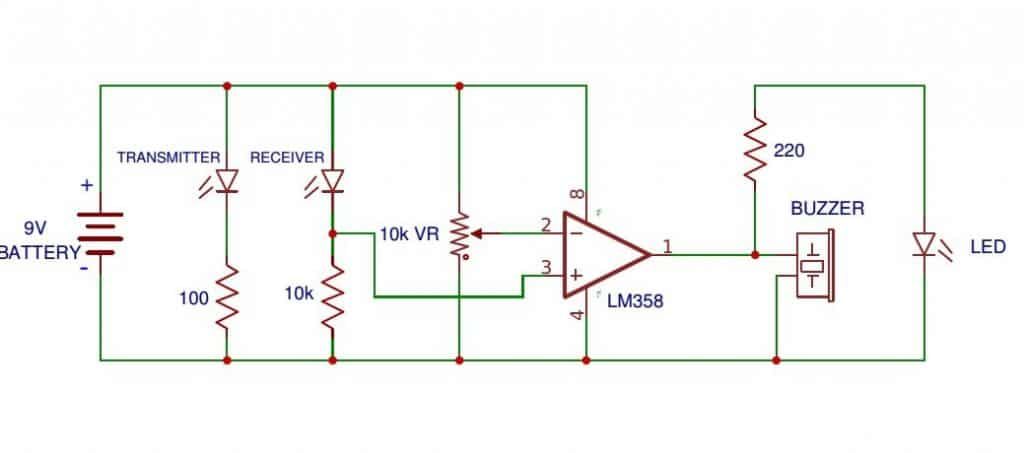
Som tidligere nævnt kræver denne enkle quadcopter kun de grundlæggende RF-fjernbetjeningsmoduler som vist i nedenstående eksempelbillede:

Det bliver du nødt til køb disse RF-moduler fra enhver onlinebutik eller fra din lokale elektroniske reserveforhandler:
Bortset fra ovennævnte RF fjernbetjeningsmoduler Der kræves også 4 børstede motorer med permanentmagnet, som faktisk danner hjertet i dronemaskinen. Det kunne være som angivet i det følgende billede med de givne beskrivelser eller andre lignende i henhold til de krævede brugerspecifikationer:

Elektriske specifikationer for motoren:
- 6V = driftsspænding (top 12V)
- 200mA = driftsstrøm
- 10.000 = RPM
Liste over dele
- 1K, 10K 1/4 watt = 1 hver
- 1uF / 25V kondensator = 1 nr
- Forudindstillet 10K eller 5K = 1no
- Rx = 5 watt trådbundet modstand, værdi skal bekræftes ved eksperimentering.
- IC 555 = 1 nr
- 1N4148 dioder = 2 nr
- IRF9540 Mosfet = 1 nr
- 6V motorbørstet type = 4 nr
- Fleksible ledninger, lodde, flux osv.
- PCB til generel brug til samling af ovenstående dele
- 4-kanals RF-fjernbetjeningsmodul som vist på de relevante billeder.
- Aluminiumskanaler, skruer, møtrikker, plader osv. Som forklaret i artiklen.
- Batteri som vist nedenfor:

Sådan konfigureres fjernbetjeningsmodtageren med motorerne
Før du forstår, hvordan du konfigurerer fjernbetjeningsmodtageren med quadcoptermotorer, ville det være vigtigt at lære, hvordan motorhastighederne skal justeres eller justeres for at generere de krævede bevægelser til venstre, højre, fremad og bagud.
Primært er der to måder, en quadcopter kan aktiveres til at bevæge sig, som er i '+' og 'x'-mode. I vores design anvender vi den grundlæggende '+' bevægelsesmetode til vores drone, som angivet i følgende diagram:

Under henvisning til ovenstående diagram indser vi, at vi simpelthen har brug for at øge hastigheden på de relevante motorer korrekt for at udføre de ønskede retningsmanøvrer på dronen.
Denne hastighedsforøgelse kan håndhæves ved at konfigurere fjernbetjeningsrelæerne i henhold til det følgende ledningsdiagram. I nedenstående diagram kan vi se en IC 555 PWM kredsløb kablet med de 4 relæer i fjernbetjeningsmodtagermodulet på de 6 relæer (1 relæ er ubrugt og kan simpelthen fjernes for at fremkalde plads og vægt).
Justering af PWM
Som det kan ses i diagrammet, er PWM-tilførslen forbundet med alle N / C-kontakterne på relæerne, hvilket indebærer, at quadcopteren normalt svæver gennem dette ensartede og lige PWM-feed, hvis driftscyklus oprindeligt kan justeres således, at quadcopter er i stand til at opnå en korrekt specificeret mængde stød og højde.
Dette kan eksperimenteres ved passende justering af den viste PWM-potte.
Sådan konfigureres relækontakterne
Relæernes N / O-kontakter kan ses direkte forbundet med den positive forsyning, så når der trykkes på en relevant knap på fjernsenderhåndsættet, aktiveres det tilsvarende relæ i modtagermodulet, hvilket igen gør det muligt for den relevante motor at få den fulde 12V forsyning fra batteriet.
Ovenstående operation tillader den aktiverede motor at få mere hastighed end resten af motorerne, hvilket gør det muligt for quadcopter at bevæge sig i den angivne retning.
Så snart fjernbetjeningsknappen slippes, stopper dronen med det samme og fortsætter med at svæve i konstant tilstand.
Identisk kan andre retningsbevægelser simpelthen opnås ved at trykke på de andre tildelte knapper på fjernbetjeningen.
Det øverste relæ er til sikring af en sikker landing af maskinen, dette gøres ved at tilføje en strømfaldmodstand i serie med N / O-kontakten på det viste relæ.
Denne modstandsværdi skal beregnes med nogle eksperimenter, således at quadcopter svæver omkring et par meter over jorden, når denne modstand skiftes gennem det vedhæftede relæ.
Kredsløbsdiagram

De viste relæer er den del af RF-modulmodtageren, hvis kontakter oprindeligt ikke er forbundet (blankt som standard) og skal tilsluttes som angivet i ovenstående diagram.
RF-fjernmodtageren skal installeres inde i quadcopteren, og dens relæer er forbundet med de relevante motorer og batteri i henhold til ovenstående layout.
Du kan se et par stik (grønfarvet), som unødigt kan tilføje vægt på dronen. Du kan fjerne dem alle for at reducere vægten og forbinde de relevante ledninger direkte til printkortet ved lodning.
Sådan bevæger dronen sig:
Som forklaret i ovenstående diskussion aktiverer den, når en bestemt fjernbetjeningsknap trykkes, det tilsvarende relæ af quadcoptermodulet, hvilket får den relevante motor til at bevæge sig hurtigere.
Denne operation tvinger igen maskinen til at bevæge sig i den modsatte retning af motoren, der skiftes til at rotere ved hurtigere omdrejningstal.
Således får f.eks. Øgning af sydmotorens hastighed maskinen til at bevæge sig mod nord, forøgelse af nordmotoren får den til at bevæge sig syd, ligesom øget østmotorhastighed får den til at bevæge sig vest og omvendt.
Interessant er det at øge syd / øst motorerne gør det muligt for quadcopter at bevæge sig mod det modsatte nord / vest, der er i diagonal tilstand ... og så videre.
Fordele og ulemper ved ovenstående forklaret Simple Qaudcopter fjernbetjeningskredsløb.
Fordele
- Billig og let at bygge selv af en relativt ny hobbyist.
- Kræver ikke komplekse joystickhandlinger.
- Kan styres ved hjælp af et enkelt 6-kanals fjernbetjeningsmodul
Ulemper
- Mindre effektiv med hensyn til backup af batteri på grund af involvering af børstede motorer
- Retningshastigheden er konstant og kan ikke varieres via fjernbetjeningshåndsættet
- Manøvrering er muligvis ikke glat, men lidt rystet, mens du skifter mellem knapperne.
Forrige: Force Sensing Resistor forklaret Næste: Kapacitiv spændingsdeler