Denne alsidige børsteløs motorstyring IC (BLDC) er udstyret til at styre enhver ønsket højspændings, højstrøm, hall-effekt sensor udstyret 3-faset BLDC motor med ekstrem nøjagtighed og sikkerhed. Lad os lære detaljerne i dybden.

Brug af IC MC33035
Kredsløbets 'helt' er enkeltchipcontrolleren MC33035, som er et højtydende anden generations IC-modul med alle de nødvendige aktive funktioner, der kan være nødvendige for at køre mest højstrøm, højspænding, 3-faset eller 4-faset BLDC motorer med en åben sløjfe eller en lukket sløjfe-konfiguration.

IC'en er udstyret med en rotorpositionsdekoder til muliggør en nøjagtig kommuteringssekventering, temperaturkompenseret reference for at muliggøre korrekt sensorspænding, en programmerbar frekvenssavtandsoscillator, tre indbyggede åbne kollektors højsides drivertrin og tre højstrøms totempole type drivere med lav side, specielt designet til at betjene et 3-faset H-bro høj effekt mosfet motor controller trin.
Chippen er også internt understøttet med avancerede beskyttelsesfunktioner og idiotsikker kontrolfaser såsom spænding under underspænding, cyklus-for-cyklus-strømbegrænsning gennem en mulighed for justerbar forsinkelseslåsning, intern IC-højtemperaturlukning og en udelukkende udtænkt fejloutput pinout, som kan være grænseflade med en MCU for en foretrukken avanceret behandling og feedbacks.
Typiske funktioner, der kan udføres med denne IC, er hastighedskontrol med åben sløjfe, fremadvendt retningsregulering, 'kør aktivering', en nøddynamisk bremsefunktion.
IC'en er designet til at arbejde med motorsensorer med faser på 60 til 300 grader eller 120 til 240 grader, som en bonus kan IC'en også eb til styring af traditionelle børstede motorer.
Sådan fungerer IC
MC33035 er blandt flere højeffektive monolitiske DC børsteløse motorstyringer oprettet af Motorola .
Den består næsten af de nødvendige funktioner til at starte et fuldt udstyret, åben sløjfe, tre- eller firefaset motorstyringssystem.
Desuden kan styreenheden opnås til at styre DC-børstemotorer. Designet med bipolar analog teknologi, har den et overlegen niveau af effektivitet og holdbarhed i hensynsløse industrialiserede omgivelser.
MC33035 bærer en rotorpositionsdekoder til nøjagtig kommuteringssekventering, en refunderet miljøreference, der er kompetent til at levere en sensoreffekt, en frekvensprogrammerbar savtandsoscillator, en fuldt tilgængelig fejlforstærker, en pulsbreddemodulator-komparator, 3 åbne kollektortopdrevudgange og 3 højstrøms totempol nedre driverudgange lige til drift af MOSFET'er.
Indbygget i MC33035 er afskærmningsfunktioner, der inkluderer underspændingsspærring, cyklus − for − cyklusstrømbegrænsning med en valgbar tidsforsinket låst nedlukningstilstand, indbygget termisk nedlukning sammen med en eksklusiv fejludgang, der bekvemt vil være grænseflade til en mikroprocessorcontroller.
Standard motorstyringsegenskaber inkluderer hastighedskontrol med åben sløjfe, kørsel fremad eller baglæns, kørselsaktivering og dynamisk bremsning. Oven i det har MC33035 en 60 ° / 120 ° vælgerstift, der konfigurerer rotorsituation-dekoderen til enten 60 ° eller 120 ° sensor elektriske faseindgange.

PIN OUT-funktioner:
Pin1, 2, 24 (Bt, At, Ct) = Dette er de tre øverste drevudgange på IC'en, der er specificeret til at betjene de eksternt konfigurerede strømforsyningsenheder såsom BJT'er. Disse pinouts er internt konfigureret som open collector mode.
Pin # 3 (Fwd, Rev) = Denne pinout er beregnet til at bruges til at kontrollere motorens rotationsretning.
Pin # 4, 5, 6 (Sa, Sb, Sc) = Dette er 3 sensorudgange fra IC'en, der er tildelt til at styre motorens styresekvens.
Pin # 7 (Output Enable) = Denne pin på IC'en er tildelt til at muliggøre motordrift, så længe der opretholdes en høj logik her, mens en lav logik er til at muliggøre en friløb af motoren.
Pin nr. 8 (referenceoutput) = Denne pin er aktiveret med en forsyningsstrøm til opladning af oscillatorens timing kondensator Ct samt giver et referenceniveau for fejlforstærkeren. Det kan også bruges til at levere strømforsyning til motorens Hall-effekt-sensor IC'er.
Pin nr. 9 (aktuel følsom ikke-inverterende input) : Signaloutputtet på 100mV kan opnås fra denne pinout med henvisning til pin nr. 15 og bruges til at annullere udgangskontaktledningen under en specificeret oscillatorcyklus. Denne pinout forbinder normalt med oversiden af den nuværende sensormodstand.
Pin # 10 (oscillator) : Denne pinout bestemmer oscillatorfrekvensen for IC ved hjælp af RC-netværket Rt og Ct.
Pin nr. 11 (Fejlforstærker ikke-inverterende input) : Denne pinout bruges sammen med hastighedsreguleringspotentiometeret.
Pin nr. 12 (Fejlforstærker inverterende input) : Denne pin er internt tilsluttet med den ovennævnte fejlforstærkerudgang til aktivering af open loop-applikationer .
Pin # 13 (Fejl forstærker output / PWM input) : Funktionen af denne pinout er at give kompensation under lukkede applikationer.
Pin nr. 14 (fejloutput) : Denne fejlindikatorudgang kan blive en aktiv logisk lav under nogle få kritiske forhold, såsom: Ugyldig indgangskode til sensoren, Aktivér pinout tilført med en nul-logik, pinout for nuværende følsomhed bliver højere end 100mV (@ pin9 med henvisning til pin15) , udløsning af spænding under underspænding eller en termisk nedlukningssituation).
Pin nr. 15 (aktuel sans inverterende input) : Denne pin er indstillet til at give referenceniveauet for den interne 100mV tærskel og kan ses forbundet med den nedre sidestrømsfølsom modstand.
Pin nr. 16 (GND) : Dette er jordstiften på IC'en og er udpeget til at give jordsignalet til kontrolkredsløbet og skal refereres tilbage til strømkildens jord.
Pin nr. 17: (Vcc) : Dette er den positive forsyningsstift, der er specificeret for at give den positive spænding til IC'ets styrekredsløb. Det mindste funktionsområde for denne pin er 10V og max ved 30V.
Pin # 18 (Vc) : Denne pinout indstiller høj tilstand (Voh) for de lavere drevudgange gennem den effekt, der tilskrives denne pin. Scenen fungerer med området fra 10 til 30V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Disse tre pinouts er internt arrangeret i form af totempolede udgange og er tildelt til at drive de lavere drevudgangseffektenheder.
Stift nr. 22 (60 D, valg af faseomskiftning 120D) : Den status, der tilskrives denne pinout, konfigurerer styringskredsløbets funktion med Hall-effektfølere til enten 60 graders (høj logik) eller 120 grader (lav logisk) fasevinkelindgange.
Pin nr. 23 (bremse) : En logik lav ved denne pinout gør det muligt for BLDC-motoren at køre jævnt, mens en logisk high øjeblikkeligt stopper motordriften gennem en hurtig deceleration.
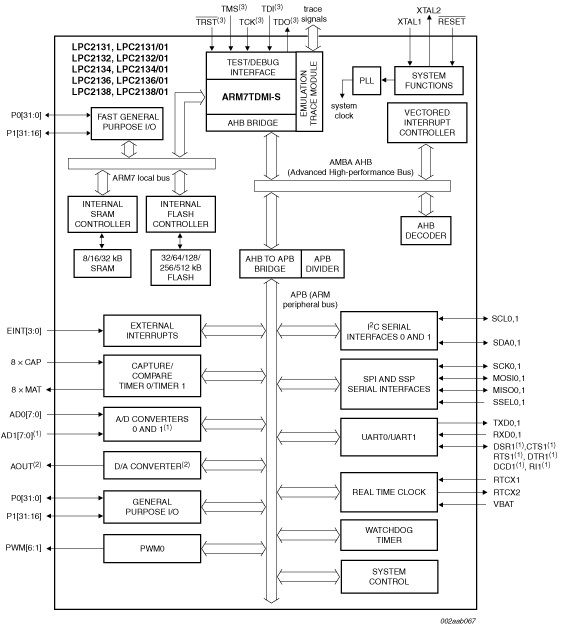
FUNKTIONEL BESKRIVELSE
Et repræsentativt internt blokdiagram er vist i ovenstående figur. En diskurs om fordelene og arbejdet med hver af de centrale blokke, der er opregnet nedenfor.
Rotor Position Decoder
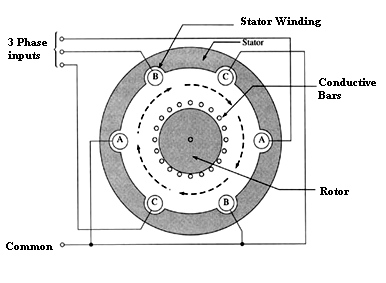
En indvendig rotorpositionsdekoder måler de 3 sensorindgange (ben 4, 5, 6) for at gøre den rigtige sekventering af de øvre og nedre drev pinouts. Sensorindgangene er fremstillet til at interface lige med åbne kollektortype Hall Effect-switche eller opto-slidsede koblinger.
Indbyggede pull-up-modstande klassificeres for at begrænse den nødvendige mængde eksterne dele. Indgangene er TTL-kompatible, med deres tærskler karakteristisk ved 2,2 V.
MC33035-serien af IC'er er beregnet til at styre 3-fasemotorer og køre med 4 af de mest populære konventioner om sensorfasning. En 60 ° / 120 ° Select (pin 22) leveres hensigtsmæssigt og leverer MC33035 til at konfigurere alene for at regulere motorer, der har enten 60 °, 120 °, 240 ° eller 300 ° elektrisk sensorfasning.
Med 3 sensorindgange opdager du 8 potentielle inputkodedannelser, hvoraf 6 er legitime rotorplaceringer.
De to andre koder er forældede, da de generelt er et resultat af en åben eller kortsluttet sensortilslutning.
Med 6 berettigede inputkoder kan dekoderen muligvis tage sig af motorens rotorposition inden for et spektrum på 60 elektriske grader.
Forward / Reverse-indgangen (Pin 3) bruges som et værktøj til at ændre forløbet af motorplan ved at vende spændingen over statorviklingen.
Så snart indgangen ændrer tilstand, fra høj til lav ved hjælp af en tildelt sensorindgangsprogramkode (for eksempel 100), byttes de lette top- og basedrevudgange ved hjælp af den samme alfastatus (AT til AB, BT til BB, CT til CB).
I det væsentlige ændres den udskiftelige streng retning og motoren vender retningssekvensen. Motor on / off-kontrol opnås ved hjælp af Output Enable (Pin 7).
Når den ikke er koblet fra, tillader en intern 25 μA strømforsyning sekventering af de førende og basiske drevudgange. Når de er jordforbundne, slukkes drevudgangene for den øverste del, og basisdrevene skubbes til lavt, hvilket fremkalder motoren til kyst og Fejludgangen udløses.
Dynamisk motorbremsning gør det muligt at udvikle en overskydende beskyttelsesmargen til den endelige enhed. Bremsesystem opnås ved at placere din bremseinput (pin 23) i en højere status.
Dette fører til, at de øverste drevudgange slukkes, og undersiden driver til at aktivere, kortslutning af den motorgenererede EMF igen. Bremseindgangen har absolut, helhjertet overvejelse over alle andre input. Den indre 40 kΩ pull-up modstand streeamlines grænseflader ved hjælp af programmets sikkerhedsafbryder ved at garantere bremseaktivering i tilfælde af åbning eller slukning.
Sandhedstabellen for kommuteringslogik er vist nedenfor. En NOR-gate med 4 indgange anvendes til at undersøge bremseindgangen og indgangene til de 3 øverste drevudgangs-BJT'er.

Målet er normalt at slukke for bremsning, før de øverste drevudgange opnår en høj status. Dette giver dig mulighed for at undgå synkroniseret leasing af top- og basisafbryderne.
I halvbølge-motordrevsprogrammer er de øverste drevkomponenter generelt ikke nødvendige, og de holdes i de fleste tilfælde adskilt. Under disse omstændigheder vil bremsning stadig blive opnået, fordi NOR-porten registrerer basisspændingen til de øverste drevudgangs-BJT'er.
Fejlforstærker
En forbedret effektivitet, fuldt kompenseret fejlforstærker med aktiv adgang til hver indgang og udgang (Pins # 11, 12, 13) tilbydes til at hjælpe med udførelsen af lukket kredsløbshastighedskontrol.
Forstærkeren leveres med en standard DC spændingsforstærkning på 80 dB, 0,6 MHz forstærkning båndbredde sammen med et bredt input common mode spændingsområde, der strækker sig fra jord til Vref.
I de fleste åbne sløjfehastighedsstyringsprogrammer er forstærkeren indstillet som en enhedsforstærkningsspændingsfølger med den ikke-inverterende indgang koblet til den hastighedsindstillede spændingsforsyning.
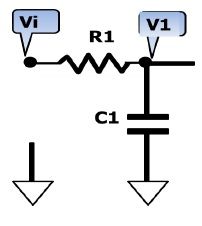
Oscillator Frekvensen af den indre rampeoscillator er hårdt forbundet gennem de værdier, der er besluttet for timingelementerne RT og CT.
Kondensator CT oplades via referenceoutputtet (ben 8) ved hjælp af modstand RT og aflades gennem en indre afladningstransistor.
Rampens spids og pit-spændinger er normalt 4,1 V og 1,5 V tilsvarende. For at tilbyde et anstændigt skimp på blandt hørbar støj og outputomskifterydelse foreslås en oscillatorfrekvens ved valg af 20 til 30 kHz. Henvis til figur 1 for valg af komponent.
Pulsbreddemodulator
Den integrerede pulsbreddemodulation tilbyder en effektiv effekt til styring af motorhastigheden ved at ændre standardspændingen, der tilskrives hver statorvikling i hele kommuteringsserien.
Når CT aflades, modellerer oscillatoren hver lås, hvilket muliggør ledning af de øverste og nedre drevudgange. PWM-komparatoren nulstiller den øverste låse og afslutter den nedre leasing af drevudgang, når CT's positive løbende rampe bliver mere end fejlforstærkerens resultat.
Impulsbreddemodulatorens tidsdiagram er vist i figur 21.
Pulsbreddemodulation til hastighedsstyring præsenterer sig udelukkende ved de lavere drevudgange. Strømgrænse Konstant funktion af en motor, der kan være væsentligt overbelastet, fører til overophedning og uundgåelig funktionsfejl.
Denne skadelige situation kan let bedst afværges sammen med brugen af cyklus-for-cyklus strømbegrænsning.
Det vil sige, at hver cyklus behandles som værende en uafhængig funktion. Strømbegrænsning for cyklus − cyklus opnås ved at spore statorstrømopbygningen hver gang en udgangskontakt udløser, og efter at have registreret en høj nuværende situation øjeblikkeligt deaktiverer kontakten og holder den slukket i den udestående periode med oscillator rampe-up interval.
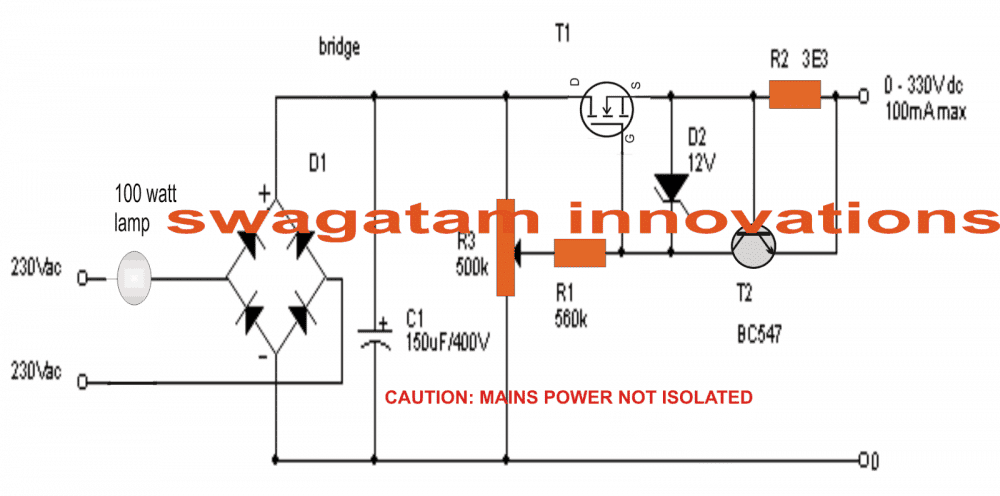
Statorstrømmen omdannes til en spænding ved at anvende en jordbaseret sensormodstand RS (figur 36) på linje med de tre nederste delstransistortransistorer (Q4, Q5, Q6).
Spændingen, der er etableret langs den forventede modstand, overvåges med strømfølsom indgangen (ben 9 og 15) og sammenlignes med det indre 100 mV referencepunkt.
De nuværende sense-komparatorindgange leveres med et input-common mode-interval på ca. 3,0 V.
I tilfælde af, at 100 mV nuværende sensortolerance overskrides, nulstiller komparatoren den nederste senselås og afslutter udgangskontaktledningen. Værdien for den nuværende følemodstand er faktisk:
Rs = 0,1 / Istator (maks.)
Fejloutput startes i en høj forstærker situation. Den indbyggede PWM-indstilling med dobbelt lås sørger for, at der kun opstår en enkelt udgangsudløserimpuls i løbet af en bestemt oscillatorrutine, uanset om den afsluttes ved hjælp af fejlforstærkerens output eller den nuværende grænsekomparator.
On-chip 6,25 V-regulatoren (Pin 8) tilbyder opladningsstrøm til oscillatortimingskondensatoren, et referencepunkt for fejlforstærkeren, som gør det muligt at levere 20 mA strøm, der er passende til specifikt at tænde for sensorer i lavspændingsprogrammer.
I større spændingsformål kan dette vokse til at være vigtigt at udveksle strømmen fra regulatoren fra IC'en. Dette opnås bestemt ved hjælp af en anden pass-transistor som vist i figur 22.
Et 6,25 V benchmark-punkt syntes at være besluttet for at muliggøre gengivelse af det ligetil NPN-kredsløb, uanset hvor Vref-VBE overgår den minimale spænding, der er nødvendig af Hall Effect-sensorer over varme.
Under korrekt transistorsortiment og tilstrækkelig kølelegeme kan der købes op til 1 amp. Belastningsstrøm.
Underspænding-Lockout
En trevejs-underspærringsspærring er integreret for at reducere skade på IC og de alternative afbrydertransistorer. Under faktorer med lav strømforsyning sikrer det, at IC og sensorer er helt funktionelle, og at der er tilstrækkelig basedrevudgangsspænding.
De positive strømforsyninger til IC (VCC) og de lave drev (VC) undersøges hver af uafhængige komparatorer, der får deres tærskler ved 9,1 V. Denne særlige fase garanterer tilstrækkelig gate-pendling, der kræves for at opnå lav RDS (til), når der køres almindelig strøm MOSFET udstyr.
Når der direkte tilføres Hall-sensorer fra referencen, vises upassende sensordrift, hvis referencepunktets udgangsspænding falder under 4,5 V.
En 3. komparator kan bruges til at genkende dette problem.
Når mere end en af komparatorerne opfanger en underspændingssituation, tændes fejloutputtet, de øverste kørsler slukkes, og basedrevets udgange er organiseret i et lavt punkt ud.
Hver af komparatorerne inkorporerer hysterese for at beskytte mod amplituder, når de overbygger deres individuelle tærskler.
Fejloutput
Den åbne kollektors fejloutput (pin 14) havde til formål at tilbyde analysedetaljer i tilfælde af en procesnedbrud. Den har en sinkstrømevne på 16 mA og kan specifikt drive en lysemitterende diode til synligt signal. Desuden er det faktisk bekvemt grænseflade med TTL / CMOS-logik til brug i et mikroprocessorstyret program.
Fejloutputtet er effektivt lavt, mens mere end en af de efterfølgende situationer finder sted:
1) Ugyldige sensorindgangskoder
2) Output aktiveret ved logik [0]
3) Nuværende følsomhed mere end 100 mV
4) Underspændingsspærring, aktivering af 1 eller højere af komparatorerne
5) Heat Shutdown, optimal junction temp getting maxed Denne eksklusive output kan også bruges til at skelne mellem motorstart eller udholdt funktion i en oversvømmet situation.
Ved hjælp af et RC-netværk blandt fejloutput og aktiveringsindgangen betyder det, at du kan udvikle en tidsforsinket lukket lukning med hensyn til overstrøm.
Ekstra kredsløb vist i figur 23 hjælper med at gøre ubesværet opstart af motorsystemer, der er udstyret med højere inerti-belastninger ved at give supplerende opsamlingsmoment, mens de stadig beskytter overstrømsbeskyttelse. Denne opgave opnås ved at placere den nuværende begrænsning til den næste end minimale værdi i en etableret periode. I løbet af en meget lang overstrømssituation oplades kondensatoren CDLY, hvilket fremkalder aktiveringsindgangen for at komme over dens tolerance til en lav tilstand.
En lås kan nu formes af den positive feedback-cyklus fra Fejloutput til Output Enable. Når den er indstillet, med Current Sense Input, kunne den kun nulstilles ved at kortslutte CDLY eller cykle strømforsyningerne.
Fuldt funktionel BLDC-skematisk højeffekt
Et fuldt funktionelt BLDC-controller-kredsløb med høj effekt og høj strøm ved hjælp af ovenstående forklarede enhed kan eb være vidne til nedenfor, det er konfigureret som en fuldbølge, 3-faset, 6-trins tilstand:

Forrige: Beregning af spænding, strøm i en buck-induktor Næste: Lav denne elektriske scooter / Rickshaw Circuit