En kort introduktion til en robot:
En robot er enhver maskine, der er helt automatisk, dvs. den starter alene, bestemmer sin egen måde at arbejde på og stopper alene. Det er faktisk en kopi af mennesket, som er designet til at lette menneskelig byrde. Det kan styres pneumatisk eller ved hjælp af hydrauliske måder eller ved hjælp af de enkle elektroniske styringsveje. Den første industrielle robot var Unimates bygget af George Devol og Joe Engelberger i slutningen af 50'erne og begyndelsen af 60'erne.
Enhver robot er bygget på 3 grundlæggende love defineret af den russiske science fiction-forfatter Isaac Asimov:
- En robot bør ikke skade mennesket direkte eller indirekte.
- En robot skal adlyde menneskelige ordrer, medmindre og indtil den overtræder den første lov.
- En robot skal beskytte sin egen eksistens, forudsat at de to første love ikke overtrædes.

En fast robot
Robotter kan være faste robotter eller mobile robotter. Mobile Robots er robotter med en mobil base, der får robotten til at bevæge sig frit i miljøet. En af de avancerede mobile robotter er Line Follower Robot. Det er dybest set en robot, der følger en bestemt sti eller bane og bestemmer sin egen handlingsvej, der interagerer med forhindring. Stien kan være en sort linje på det hvide gulv (synligt) eller et magnetfelt (usynligt). Dens applikationer starter fra grundlæggende indenlandske anvendelser til industrielle anvendelser osv. Den nuværende betingelse i industrien er, at de bærer pakkerne eller materialerne et sted til et andet sted ved hjælp af kransystemet. Nogle gange kan løft af store vægte på det tidspunkt forårsage brud på løftematerialer og vil også forårsage skader på pakkerne. Linjen, der følger robotter, bruges ofte til at bære børn gennem indkøbscentre, hjem, underholdningssteder, industrier. Anvendelsen af linjefølgning robotkøretøj transporterer materialerne fra et sted til et andet sted i industrierne. Denne robotbevægelse afhænger helt af sporet. Robotten kan gøre enhver ting, du indstiller dem til at gøre. Som i fabrikker er alt, hvad de har at gøre med at fremstille deres produkter, at lave robotten.

En mobil robot
Linjefølgerrobot
En linjefølgerrobot er en robot, der følger en bestemt sti, der styres af en tilbagekoblingsmekanisme.
Opbygning af en grundlæggende linjefølgerrobot:
Opbygning af en grundlæggende Line Follower-robot involverer følgende trin.
- Design af den mekaniske del eller robotens krop
- Definere robottenes kinematik
- Design af styringen af robotten

En linjefølgerrobot
Robotens mekaniske del eller krop kan designes ved hjælp af AutoCAD eller Workspace. En grundlæggende Line-følgerrobot kan bestå af en base i de to ender, som hjulene er monteret på. Et rektangulært ark af hård plast kan bruges som bund. Endvidere kan et stift legeme som en cylinder tilføjes sammen med andre formede legemer, der er forbundet med hinanden ved hjælp af samlinger, og hver med sin definerede bevægelse i en bestemt retning. Line follower-robotten kan være en mobilrobot på hjul med en fast base, en benbenet mobilrobot med flere stive kroppe, der er forbundet med hinanden.
Det næste trin involverer at definere robotens kinematik. Kinematisk analyse af robotten involverer beskrivelsen af dens bevægelse i forhold til et fast koordinatsystem. Det vedrører hovedsageligt bevægelsen af robotten og bevægelsen af hver krop i tilfælde af en benbenet robot. Det involverer generelt dynamikken i robotbevægelsen. Hele robottens bane er indstillet ved hjælp af Kinematic-analysen. Dette kan gøres ved hjælp af Workspace-software.
Styringen af robotten er det vigtigste aspekt af dens arbejde. Her refererer udtrykket kontrol til robotens bevægelseskontrol, dvs. styre hjulets bevægelse. En grundlæggende linjefølgerrobot følger en bestemt sti, og robotens bevægelse langs denne sti styres ved at kontrollere hjulets rotation, som er placeret på akslerne på de to motorer. Så den grundlæggende kontrol opnås ved at styre motorerne. Kontrolkredsløbet indebærer brug af sensorer til at registrere stien og mikrokontrolleren eller en hvilken som helst anden enhed til at kontrollere motordriften gennem motordrivere, baseret på sensorudgangen.
2 måder at styre en linjefølgerrobot på
- Uden at bruge mikrocontrollere

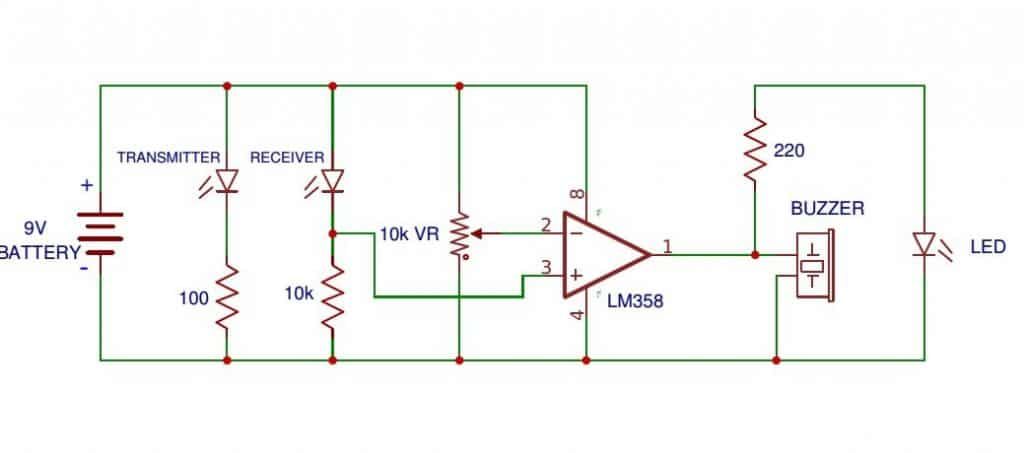
Blokdiagram over kontrolsystemet
Den består af et IR-LED og fotodiode arrangement for hver motor, der styres ved at tænde og slukke for transistoren.
IR-LED'en ved korrekt forspænding udsender infrarødt lys. Dette IR-lys reflekteres i tilfælde af en hvid overflade, og det reflekterede IR-lys falder ind i fotodioden. Fotodiodens modstand falder, hvilket fører til en stigning i strøm gennem den og dermed spændingsfaldet over den. Fotodioden er forbundet til basen af transistoren, og som et resultat af øget spænding over fotodioden begynder transistoren at lede, og således får motoren, der er forbundet til transistorens kollektor, nok forsyning til at begynde at rotere. I tilfælde af en sort farve på stien, som et af sensorarrangementet støder på, reflekteres IR-lyset ikke, og fotodioden giver mere modstand, hvilket får transistoren til at stoppe ledningen, og til sidst holder motoren op med at rotere.
Således kan hele systemet styres ved hjælp af et simpelt LED-fotodiode-transistorarrangement.
- Med brug af Microcontrollers
Arbejdsprincip:
Linjen braklægningsrobot er en af de selvdrivende robotter. Det registrerer og nedbryder en linje trukket over området. Linjen er angivet med en hvid linje på en blokoverflade eller bloklinjen på en hvid overflade. Dette system skal være fornuftigt efter linjen. Denne applikation afhænger af sensorerne. Her bruger vi to sensorer til stigdetekteringsformål. Det er nærhedsføler og IR-sensor. Nærhedsføleren, der bruges til stedetektion, og IR-sensoren, der anvendes til detektion af forhindringer. Disse sensorer er monteret i forenden af robotten. Mikrocontrolleren er en intelligent enhed, hele kredsløbet styres af mikrokontrolleren.

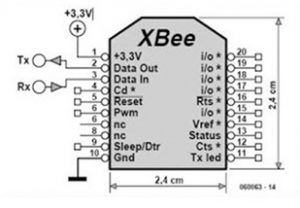
Blokdiagram over linie efter robotkøretøj med mikrokontroller
Forskellige typer linjestyrede robotkøretøjer:
Der er to typer linjestyrede robotbiler
- Mobilbaseret linjestyret robotkøretøj
- RF-baseret linjestyret robotkøretøj
Anvendelser af line follower robot:
- Industrielle applikationer : Disse robotter kan bruges som automatiserede udstyrsbærere i industrier, der erstatter traditionelle transportbånd.
- Automatiske applikationer : Disse robotter kan også bruges som automatiske biler kører på veje med indlejrede magneter.
- Indenlandske applikationer : Disse kan også bruges hjemme til husholdningsformål som gulvrengøring osv.
- Vejledning ansøgninger : Disse kan bruges på offentlige steder som indkøbscentre, museer osv. Til at give vejvejledning.
Fordele:
- Robotbevægelse er automatisk
- Det bruges til langdistance applikationer
- Enkelhed ved bygning
- Tilpas og glem systemet
- Anvendes i hjemmet, industrielle automatiseringer osv.