
Som navnet antyder, vil denne artikel give en præcis idé om PID-controllerens struktur og funktion. Men når vi går i detaljer, lad os få en introduktion om PID-controllere. PID-controllere findes i en bred vifte af applikationer til industriel processtyring. Ca. 95% af lukkede kredsløb i industriel automatisering sektor bruger PID-controllere. PID står for Proportional-Integral-Derivative. Disse tre controllere er kombineret på en sådan måde, at det producerer et styresignal. Som feedback-controller leverer den kontroloutputtet på de ønskede niveauer. Før mikroprocessorer blev opfundet, blev PID-kontrol implementeret af de analoge elektroniske komponenter. Men i dag behandles alle PID-controllere af mikroprocessorerne. Programmerbare logiske controllere har også den indbyggede PID-controller-instruktioner. På grund af PID-controllernes fleksibilitet og pålidelighed bruges disse traditionelt i processtyringsapplikationer.
Hvad er en PID-controller?
Udtrykket PID står for proportional integreret derivat, og det er en slags enhed, der bruges til at styre forskellige procesvariabler som tryk, flow, temperatur og hastighed i industrielle applikationer. I denne controller bruges en kontrolsløjfe feedback-enhed til at regulere alle procesvariablerne.
Denne type kontrol bruges til at drive et system i retning af en objektiv placering ellers niveau. Det er næsten overalt til temperaturregulering og bruges i videnskabelige processer, automatisering og utallige kemiske stoffer. I denne controller bruges feedback fra lukket kredsløb til at opretholde det reelle output fra en metode som tæt på målet, ellers output, hvis det er muligt. I denne artikel diskuteres PID-controllerdesignet med kontroltilstande, der bruges i dem som P, I & D.
Historie
Historien om PID-controlleren er, I år 1911 blev den første PID-controller udviklet af Elmer Sperry. Derefter blev TIC (Taylor Instrumental Company) implementeret som en tidligere pneumatisk controller, der var helt indstillelig i 1933. Efter et par år fjernede kontrolingeniører fejlen i steady-state, der findes inden for proportionale controllere ved at justere slutningen til en falsk værdi, indtil fejlen ikke var nul.
Denne justering inkluderede fejlen, der er kendt som den proportionale-integrale controller. Derefter i 1940 blev den første pneumatiske PID-controller udviklet gennem en afledt handling for at reducere overskridelsesproblemer.
I 1942 har Ziegler & Nichols indført tuningsregler for at finde og indstille de passende parametre for PID-controllere af ingeniørerne. Endelig blev automatiske PID-controllere i vid udstrækning brugt i industrier i midten af 1950.
Blokdiagram for PID-controller
Et lukket kredsløbssystem som en PID-controller inkluderer et feedbackkontrolsystem. Dette system evaluerer feedbackvariablen ved hjælp af et fast punkt for at generere et fejlsignal. Baseret på det ændrer det systemudgangen. Denne procedure fortsætter, indtil fejlen når nul, ellers svarer værdien af feedbackvariablen til et fast punkt.
Denne controller giver gode resultater sammenlignet med ON / OFF type controller. I ON / OFF-type controller er der blot to betingelser, der er tilgængelige for at styre systemet. Når procesværdien er lavere end det faste punkt, tænder den. På samme måde slukker den, når værdien er højere end en fast værdi. Outputtet er ikke stabilt i denne type controller, og det vil ofte svinge i området for det faste punkt. Denne controller er dog mere stabil og nøjagtig sammenlignet med ON / OFF-typen controller.

Arbejde med PID-controller
Arbejde med PID-controller
Ved brug af en billig ON-OFF-controller er kun to kontroltilstande mulige, som fuldt til eller helt FRA. Det bruges til en begrænset kontrolapplikation, hvor disse to kontroltilstande er nok til kontrolmålsætningen. Dog oscillerende karakter af denne kontrol begrænser dens anvendelse, og derfor erstattes den af PID-controllere.
PID-controller opretholder output således, at der er nul fejl mellem procesvariablen og sætpunkt / ønsket output ved operationer med lukket kredsløb. PID bruger tre grundlæggende kontroladfærd, der forklares nedenfor.
P- controller
Proportional eller P-controller giver et output, der er proportionalt med den aktuelle fejl e (t). Den sammenligner det ønskede eller indstillede punkt med den aktuelle værdi eller feedbackværdien for feedbackprocessen. Den resulterende fejl ganges med en proportional konstant for at få output. Hvis fejlværdien er nul, er denne controllerudgang nul.

P-controller
Denne controller kræver forspænding eller manuel nulstilling, når den bruges alene. Dette skyldes, at det aldrig når stabil tilstand. Det giver stabil drift, men opretholder altid steady-state-fejlen. Reaktionshastigheden øges, når den proportionelle konstant Kc stiger.

P-controller-respons
I-controller
På grund af begrænsningen af p-controller, hvor der altid findes en forskydning mellem procesvariablen og setpunktet, er I-controller nødvendig, som giver den nødvendige handling for at eliminere steady-state-fejlen. Det integrerer fejlen over en periode, indtil fejlværdien når nul. Den holder værdien til den endelige kontrolenhed, hvor fejlen bliver nul.

PI-controller
Integreret kontrol mindsker dets output, når en negativ fejl finder sted. Det begrænser reaktionshastigheden og påvirker systemets stabilitet. Reaktionshastigheden øges ved at reducere integralforstærkning, Ki.

PI-controllerens respons
I ovenstående figur fortsætter også steady-state-fejlen, når forstærkningen af I-controlleren falder. I de fleste tilfælde anvendes PI-controlleren især hvor højhastighedsrespons ikke er påkrævet.
Under brug af PI-controller er I-controller-output begrænset til noget rækkevidde for at overvinde integreret afvikling forhold, hvor det integrerede output fortsætter med at stige selv ved nul fejltilstand på grund af ikke-lineariteter i anlægget.
D-controller
I-controller har ikke evnen til at forudsige den fremtidige opførsel af fejl. Så det reagerer normalt, når sætpunktet er ændret. D-controller overvinder dette problem ved at foregribe den fremtidige opførsel af fejlen. Dets output afhænger af hastigheden for fejlændring i forhold til tid ganget med afledt konstant. Det giver kickstart for output, hvilket øger systemets respons.

PID-controller
I ovenstående figurrespons af D er controlleren mere sammenlignet med PI-controlleren, og afregningstiden for output reduceres også. Det forbedrer systemets stabilitet ved at kompensere for faseforsinkelse forårsaget af I-controller. Forøgelse af den afledte forstærkning øger reaktionshastigheden.

PID-controllersvar
Så til sidst observerede vi, at ved at kombinere disse tre controllere kan vi få det ønskede svar til systemet. Forskellige producenter designer forskellige PID-algoritmer.
Typer af PID-controller
PID-controllere er klassificeret i tre typer som ON / OFF, proportional og standard type controllere. Disse controllere bruges baseret på kontrolsystemet, brugeren kan bruges controller til at regulere metoden.
ON / OFF kontrol
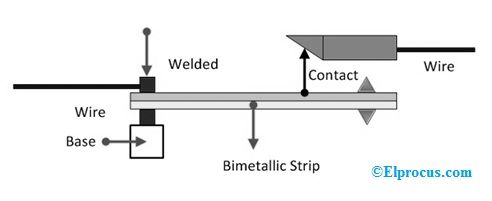
En on-off-kontrolmetode er den enkleste type enhed, der bruges til temperaturregulering. Enhedsudgangen kan være TIL / FRA uden nogen centertilstand. Denne controller tænder udgangen, når temperaturen krydser det faste punkt. En limit controller er en bestemt type ON / OFF controller, der bruger et låserelæ. Dette relæ nulstilles manuelt og bruges til at slukke for en metode, når en bestemt temperatur er nået.
Proportional kontrol
Denne type controller er designet til at fjerne den cykling, der er forbundet via ON / OFF-kontrol. Denne PID-controller reducerer den normale effekt, der tilføres varmelegemet, når temperaturen når det faste punkt.
Denne controller har en funktion til at styre varmelegemet, så det ikke overstiger det faste punkt, men det når det faste punkt for at opretholde en konstant temperatur.
Denne proportioneringshandling kan opnås ved at tænde og slukke for udgangen i små tidsperioder. Denne tidsproportionering vil ændre forholdet fra ON-tid til OFF-tid for temperaturregulering.
Standard type PID-controller
Denne form for PID-controller vil flette proportional kontrol gennem integreret & derivatkontrol for automatisk at hjælpe enheden med at kompensere for ændringer inden i systemet. Disse ændringer, integrerede og afledte udtrykkes i tidsbaserede enheder.
Disse controllere henvises også gennem deres gensidige, RATE & RESET tilsvarende. Vilkårene for PID skal justeres separat, ellers skal de indstilles til et specifikt system med prøve samt fejl. Disse controllere tilbyder den mest præcise og stabile kontrol af de 3 typer controller.
Real-time PID-controllere
På nuværende tidspunkt findes der forskellige slags PID-controllere på markedet. Disse controllere bruges til industrielle kontrolkrav som tryk, temperatur, niveau og flow. Når disse parametre er kontrolleret gennem PID, omfatter valgene at anvende en separat PID-controller eller en PLC.
Disse separate controllere anvendes, uanset hvor det ellers kræves, at der kontrolleres en to sløjfer såvel som kontrolleres på anden måde under de forhold, hvor det er komplekst til højre for indrejse gennem større systemer.
Disse kontrolenheder giver forskellige valg til solo & twin loop kontrol. De selvstændige PID-controllere leverer flere faste punktkonfigurationer til at producere de autonome flere alarmer.
Disse enkeltstående controllere består hovedsageligt af PID-controllere fra Honeywell, temperaturregulatorer fra Yokogawa, autotune-controllere fra OMEGA, Siemens og ABB-controllere.
PLC'er bruges som PID-controllere i de fleste industrielle kontrolapplikationer. Arrangementet af PID-blokke kan udføres inden for PAC'er eller PLC'er for at give overlegne valg for en nøjagtig PLC-kontrol. Disse controllere er smartere såvel som kraftfulde sammenlignet med separate controllere. Hver PLC inkluderer PID-blokken inden for softwareprogrammeringen.
Tuning Metoder
Inden PID-controlleren arbejder, skal den indstilles, så den passer til dynamikken i den proces, der skal styres. Designere angiver standardværdierne for P-, I- og D-termer, og disse værdier kunne ikke give den ønskede ydelse og fører undertiden til ustabilitet og langsomme kontrolpræstationer. Forskellige typer af tuningmetoder er udviklet til at tune PID-controllerne og kræver meget opmærksomhed fra operatøren for at vælge de bedste værdier for proportionale, integrale og afledte gevinster. Nogle af disse er angivet nedenfor.
PID-controllere bruges i de fleste industrielle applikationer, men man skal kende indstillingerne for denne controller for at justere den korrekt for at generere det foretrukne output. Her er tuning intet andet end proceduren for at modtage et ideelt svar fra controlleren ved at indstille de bedste proportionale gevinster, integrerede og afledte faktorer.
Det ønskede output fra PID-controlleren kan opnås ved at indstille controlleren. Der er forskellige teknikker til rådighed for at få det krævede output fra controlleren som prøve & fejl, Zeigler-Nichols & proces reaktionskurve. De mest anvendte metoder er trial & error, Zeigler-Nichols osv.
Prøvnings- og fejlmetode: Det er en enkel metode til indstilling af PID-controller. Mens systemet eller controlleren fungerer, kan vi indstille controlleren. I denne metode er vi først nødt til at indstille Ki- og Kd-værdier til nul og øge den proportionale sigt (Kp), indtil systemet når oscillerende opførsel. Når den er oscillerende, skal du justere Ki (integreret betegnelse), så svingningerne stopper, og til sidst justere D for at få et hurtigt svar.
Process reaktionskurve teknik: Det er en åben-loop tuning teknik. Det producerer et svar, når der anvendes et trinindgang til systemet. Oprindeligt er vi nødt til at anvende noget kontroloutput til systemet manuelt og skal registrere responskurven.
Derefter skal vi beregne hældning, dødtid, kurvens stigningstid og endelig erstatte disse værdier i P-, I- og D-ligninger for at få forstærkningsværdierne for PID-termer.

Process reaktionskurve
Zeigler-Nichols metode: Zeigler-Nichols foreslog lukkede kredsløbsmetoder til indstilling af PID-controlleren. Disse er den kontinuerlige cykelmetode og dæmpede svingningsmetode. Procedurer for begge metoder er de samme, men svingningsadfærd er forskellig. I dette skal vi først indstille p-controller-konstanten, Kp til en bestemt værdi, mens Ki- og Kd-værdierne er nul. Proportionel forstærkning øges, indtil systemet svinger med en konstant amplitude.
Forøgelse ved hvilket system producerer konstante svingninger kaldes ultimativ forstærkning (Ku) og svingningsperioden kaldes den ultimative periode (Pc). Når den er nået, kan vi indtaste værdierne for P, I og D i PID-controlleren af Zeigler-Nichols-tabellen afhænger af den controller, der bruges som P, PI eller PID, som vist nedenfor.

Zeigler-Nichols bord
PID-controller struktur
PID-controller består af tre udtryk, nemlig proportional, integreret og afledt kontrol. Den kombinerede drift af disse tre controllere giver en kontrolstrategi til processtyring. PID-controller manipulerer procesvariabler som tryk, hastighed, temperatur, flow osv. Nogle af applikationerne bruger PID-controllere i kaskadenetværk, hvor to eller flere PID'er bruges til at opnå kontrol.

Struktur af PID-controller
Ovenstående figur viser strukturen på PID-controlleren. Den består af en PID-blok, der giver sin output til procesblokken. Proces / anlæg består af endelige kontrolanordninger som aktuatorer, kontrolventiler og andre kontrolanordninger til styring af forskellige industriprocesser / anlæg.
Et tilbagemeldingssignal fra procesanlægget sammenlignes med et sætpunkt eller et referencesignal u (t), og det tilsvarende fejlsignal e (t) føres til PID-algoritmen. I henhold til de proportionale, integrerede og afledte kontrolberegninger i algoritmen producerer controlleren et kombineret respons eller kontrolleret output, der påføres anlæg til styringsanordninger.
Alle kontrolapplikationer har ikke brug for alle tre kontrolelementer. Kombinationer som PI og PD-kontroller bruges meget ofte i praktiske anvendelser.
Ansøgninger
PID-controllerens applikationer inkluderer følgende.
Den bedste PID-controller-applikation er temperaturregulering, hvor controlleren bruger en indgang fra en temperatursensor, og dens output kan allieres til et kontrolelement som en ventilator eller en varmelegeme. Generelt er denne controller simpelthen et element i et temperaturkontrolsystem. Hele systemet skal undersøges såvel som overvejes, mens du vælger den rigtige controller.
Temperaturkontrol af ovnen
Generelt bruges ovne til at omfatte opvarmning såvel som rummer en enorm mængde råmateriale ved enorme temperaturer. Det er normalt, at det besatte materiale inkluderer en enorm masse. Derfor kræver det en stor mængde inerti, og materialets temperatur ændres ikke hurtigt, selv når der påføres enorm varme. Denne funktion resulterer i et moderat stabilt PV-signal og tillader, at den afledte periode effektivt korrigerer for fejl uden ekstreme ændringer i enten FCE eller CO.
MPPT Charge Controller
V-I-karakteristikken for en solcellecelle afhænger hovedsageligt af temperaturområdet såvel som bestrålingen. Baseret på vejrforholdene ændres strøm- og driftsspændingen konstant. Så det er ekstremt vigtigt at spore den højeste PowerPoint i et effektivt solcelleanlæg. PID-controller bruges til at finde MPPT ved at give PID-controlleren fast spænding og strømpunkter. Når vejrforholdene er ændret, holder trackeren strøm og spænding stabil.
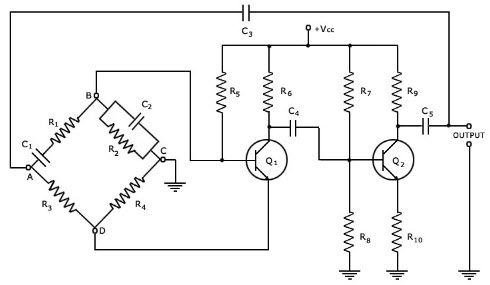
Konverteren til kraftelektronik
Vi ved, at konverter er en anvendelse af kraftelektronik, så en PID-controller bruges mest i konvertere. Hver gang en konverter er allieret gennem et system baseret på ændringen inden i belastningen, ændres konverterens output. For eksempel er en inverter forbundet med belastning, den enorme strøm leveres, når belastningerne øges. Således er spændingsparameteren såvel som strømmen ikke stabil, men den vil ændre sig baseret på kravet.
I denne tilstand genererer denne controller PWM-signaler for at aktivere inverterens IGBT'er. Baseret på ændringen inden for belastningen leveres reaktionssignalet til PID-styreenheden, så den vil producere n fejl. Disse signaler genereres baseret på fejlsignalet. I denne tilstand kan vi få ind- og udskiftelige input via en lignende inverter.
Anvendelse af PID-controller: Lukket sløjfekontrol til en børsteløs DC-motor
PID-controller-grænseflade
Designet og grænsefladen af PID-controlleren kan udføres ved hjælp af Arduino-mikrocontrolleren. I laboratoriet er den Arduino-baserede PID-controller designet ved hjælp af Arduino UNO-kortet, elektroniske komponenter, termoelektrisk køler, mens softwareprogrammeringssprogene, der bruges i dette system, er C eller C ++. Dette system bruges til at kontrollere temperaturen i laboratoriet.
Parametrene for PID for en bestemt controller findes fysisk. Funktionen af forskellige PID-parametre kan implementeres gennem den efterfølgende kontrast mellem forskellige former for controllere.
Dette grænsefladesystem kan effektivt beregne temperaturen gennem en fejl på ± 0,6 ℃, hvorimod en konstant temperatur reguleres gennem blot en lille forskel fra den foretrukne værdi opnås. De begreber, der anvendes i dette system, giver både billige og nøjagtige teknikker til at styre fysiske parametre i et foretrukket område inden for laboratoriet.
Således diskuterer denne artikel en oversigt over PID-controlleren, som inkluderer historik, blokdiagram, struktur, typer, arbejde, indstillingsmetoder, interface, fordele og applikationer. Vi håber, at vi har været i stand til at give grundlæggende, men præcis viden om PID-controllere. Her er et simpelt spørgsmål til jer alle. Blandt de forskellige tuningmetoder, hvilken metode anvendes fortrinsvis til at opnå en optimal funktion af PID-controlleren, og hvorfor?
Du bedes venligst give dine svar i kommentarfeltet nedenfor.
Fotokreditter
PID-controller blokdiagram af wikimedia
PID controller struktur, P-controller, P - controller respons & PID controller af blog.opticontrols
P - controllerens respons ved kontrol.engine.umich
PI-controllerens respons ved m. spis
PID-controllerens svar fra wikimedia
Zeigler-Nichols bord af kontrol. motor






{kind=link}
{kind=link}
{kind=link}
{kind=link}