I 1911 designede H.K. Schrage Schrage-motoren. Denne motor er en type induktionsmotor, hvor vedligeholdelsen af denne motor er mindre, billig og robust. Dette er en 3-faset kommutator, børsteforskydning, rotorfødet og shunt-type motor. Denne motor har tre typer viklinger, ud af tre viklinger er to placeret i rotoren, og den resterende er placeret i statoren. Primærviklingen, sekundærviklingen og reguleringsviklingen er de tre typer viklinger, der findes i denne motor. Disse induktionsmotorer bruges til kommutatorernes høje, mellemstore og lave magt. Forsyningsspændingen på denne Schrage-motor overstiger ikke 600V. I denne artikel diskuteres en kort forklaring af denne motor.
Hvad er Schrage Motor?
Definition: Schrage-motoren er en type induktionsmotor, som har tre typer viklinger, de er primære, sekundære og tertiære viklinger. Denne motor er en kombination af frekvensomformer og induktion af sårotor. Motorens primære vikling placeres på rotoren ved hjælp af tre glideringe, og faseforsyningen gives til primærviklingen. Den sekundære vikling placeres på statoren og det er nødvendigt for PF-styring ( Magtfaktor ) og hastighed, og den tredje vikling, der er tertiær, som er forbundet til kommutatoren .
Schrage Motor Circuit Diagram
Det ækvivalente kredsløbsdiagram for kommutatoren med variabel hastighed type 3-faset induktionsmotor (Schrage-motor) er vist i nedenstående figur.

ækvivalent kredsløb-udvikling-af-3-fase-induktionsmotor
Hvor
'R1 'er statorens modstand pr. fase
'X1 'er statorens lækagereaktans pr. fase
'X0 ′og R0er kernetabskomponenterne pr. fase
'V1 'er forsyningsspændingen,
'ER1 'er EMF pr. fase
'JEG'0er strømmen uden belastning pr. fase
'JEG'ier 'jeg'0arbejdskomponent
'JEG'mer 'jeg'0magnetiserer komponent pr. fase.
Det omtrentlige ækvivalente kredsløbsdiagram for Schrage-induktionsmotoren eller trefasede induktionsmotoren er vist i nedenstående figur.

ækvivalent kredsløbsdiagram-af-Schrage-induktionsmotor
I ovenstående figur, 'jeg'to er den reflekterede rotorstrøm i statoren, og denne strøm strømmer gennem alle komponenterne r1, rto'', X1''og Xto''. Rto''(1-S) / S er en elektrisk ækvivalent med mekanisk belastning. Ved tomgangstilstand for trefaset induktionsmotor er N = Ns, når 'Ns' er lig med nul, og slip (S) også er lig med nul.
Sæt nu S = 0 i 'r'to, så 'r'tobliver uendelig. Hvis 'r'tobehandles som uendelig i ubelastet tilstand, så strømmer ingen strøm gennem den elektriske ækvivalent af mekanisk belastning. På dette tidspunkt er sekundærviklingen åben. Når N = 0, S = 1, sættes S = 1 i rto''derefter rtobliver nul. På dette tidspunkt kan vi sige, at sekundærviklingen er kortsluttet.
Schrage Motor Theory
Tre-faset AC kommutator motorer er en særlig type trefaset induktionsmotor. Kommutatorerne bruges til at konvertere AC til DC eller DC til AC i DC-generatoren. Her bruger kommutatorerne ikke til at konvertere AC til DC eller DC til AC, men de bruges kun til at levere strøm i et kredsløb til et andet kredsløb.
Kommutatoren er nødvendig, fordi de giver nogle specielle egenskaber som konstant hastighedsdrev som en shuntmaskine, en bred vifte af hastighed med ensartede accelerationer, effektfaktor (PF), og den samlede driftseffektivitet er høj. Hastighedsreguleringsmekanismen og effektfaktormekanismen er de to konstruktionsaspekter. Effektfaktorkontrolmekanismen opnås grundlæggende ved børsteskift, og hastighedsreguleringsmekanismen opnås ved injektion af EMF (elektromagnetisk felt) med en korrekt frekvens. Der vil være en rotor-EMF-indsprøjtning i hastighedsreguleringsmekanismen. Rotorkredsløbet er vist nedenfor.

rotorkredsløb
I kredsløbet ovenfor er SE2 indgangsspændingen til rotoren. Rotoren har sin egen impedans som 'Z2'. Strømmen i rotoren kan gives ved
I2 = SE2 / Z2
Vi ved det drejningsmoment i induktionsmotoren er direkte proportional med Itoto* Rto/ S. Hvis vi øger strømmen, øges momentet. Hvis momentet stiger, reduceres hastigheden. Et andet navn på Schrage-motor er den rotorfodrede trefasede AC-kommutator. Denne motor er en speciel type af en omvendt induktionsmotor, der har en trefasetilførsel på rotoren og statoren.
Konstruktion
Schrage-motoren har stator og rotor, hvor rotoren er indgangen, og den har to viklinger komponenter som primærvikling og regulering af vikling. Den primære vikling modtager en trefasetilførsel, og hovedstrømmen, der kræves til maskinen, produceres af primærvikling, der er til stede på rotoren.
Den regulerende vikling kaldes også som tertiær vikling. Hovedformålet med denne vikling er at understøtte pendling. Statoren har kun en enkelt vikling, der er sekundærvikling, denne vikling er en 3-faset kortslutningsvikling. Denne motor har seks børster som A1, A2, B1, B2, C1 og C2, der består af fosforbronze. Kommutatoren er dybest set cirkulær i form, den trefasede Schrage-motor er vist i nedenstående figur.

tre-fase-Schrage-motor
Antag, at hvis vi vil flytte eller skifte 'A1' terminalen i en vinkel, så skiftes terminalerne B1 & C1 også sammen med 'A1' terminalen. Terminalerne A2, B2 og C2 er justeret i den samme mekanisme. Børsterne som A1, B1, C1 bevæger sig i en retning, og børsterne A2, B2 og C2 bevæger sig i en anden retning, der er modsat terminalen A1, B1 og C1.
Vinklen, der opretholdes mellem A1, B1 og C1, er 1200ligeledes er vinklen, der opretholdes mellem A2, B2 og C2, også 1200. Vinklen, der opretholdes mellem A1 & A2, B1, og B2, C1 og C2, er et betragtningssted, der kaldes beta (β) vinkel, der kaldes en børste forskydningsvinkel. Ved kun at ændre denne beta (β) kan vi opnå effektfaktorkontrol. Hele operationen afhænger af, hvor mange vinkler du skifter, eller hvor mange vinkler du opretholder ved start og slutning af slutningen af en fasevikling. Dette er forklaringen på Schrage-motorkonstruktionen.
Arbejder
Arbejdet med Schrage-motoren er enkelt, når du giver trefasetilførsel til rotoren, vil den producere et roterende magnetfelt (RMF). Dette roterende magnetfelt roterer ved synkron hastighed (Ns), først vil rotorens hastighed ved 'Nr' være lig med nul. Statoren er altid nul, fordi det er et stationært punkt, der ikke vil rotere. Hvis det roterende magnetfelt roterer med urets retning, induceres EMF to steder ved sekundærvikling og ved regulering af vikling eller tertiærvikling.
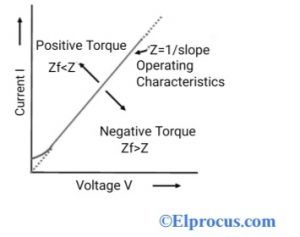
De regulerende viklinger induceres ved hjælp af transformator, og de sekundære viklinger induceres af dynamisk induceret EMF. Sammenlignet med en normal induktionsmotor er rotoren RMF ved SNSmed hensyn til rotoren og ved NSmed hensyn til statoren. Derefters- Nrer luftspalthastigheden i forhold til statoren. I nedenstående egenskaber kan vi se, at når belastningen stiger, øges effektfaktoren, hastigheden falder, og effektiviteten øges.

egenskaber
Effektkontrolfaktor
'Ρ' vinkelforskydning introduceres mellem den sekundære og tertiære viklingsakse for at forbedre effektfaktoren. Fluxen skærer den tertiære viklingsakse, når den dækker 'ρ' vinkelforskydning. Mellem primære og regulerende viklinger vil transformatorhandlingen forekomme, og imellem sekundære og primære viklinger vil der være en induktionsmotorhandling.
Hastighedskontrol af Schrage Motor
Schrage-motorhastigheden kan styres ved at variere det indsprøjtede elektromagnetiske felt (EMF) i motoren. Børsterne er forbundet med kommutatorer, nedenstående figur viser forbindelsen af børster til kommutatoren.

hastighedskontrol-af-Schrage-motor
I figur (a) er begge børster A og B forbundet til en enkelt kommutator eller samme kommutator. Det indsprøjtede elektromagnetiske felt er nul, og nrer lig med ns(nr= ns) I dette tilfælde.
I figur (b) er børsten 'A' forbundet med 'a' terminal, og børsten 'B' er forbundet til en terminal 'b'. I dette tilfælde er nrer mindre end ns(nr
I figur (c) udskiftes børsternes positioner i dette tilfælde og nrer større end ns(nr> ns).
Den indsprøjtede EMF til enhver børsteseparation 'θ' er givet af
ERj= Ejmaxsynd (θ / 2)
Når θ = 0, injiceres EMF Ej= 0 og når θ = 900, den injicerede EMF Ej= Ejmax.
Fordele
Det fordelene ved Schrage-motoren er
- Hastighed er god
- Effektfaktor (PF) er høj ved høj hastighed
- Nem at kontrollere hastigheden
Ulemper
Det ulemperne ved Schrage-motoren er
- Tab er mere
- Struktur er kompliceret
- Lav effektivitet
Ansøgninger
Det anvendelser af Schrage-motoren er
- Kraner
- Hejse fans
- Centrifugalpumper
- Maskiner til trykning og pakning
- Transportbånd
- Strikning og ringspinding
- Papirfabrikker
- Stokers
- Foder- og separatordrev
- Frekvensændring
- Diverse
Ofte stillede spørgsmål
1). Hvad er den mest effektive motor?
Den mest effektive motor er en børsteløs motor.
2). Hvad er sårrotormotoren?
Såret er en vekselstrøm elektrisk motor.
3). Hvad er en enkelt induktionsmotor?
Enkeltinduktormotoren er en type vekselstrømsmotor, som bruges til at udføre fysiske opgaver.
4). Hvilken motor har det højeste startmoment?
Jævnstrømsmotorer har det højeste startmoment.
5). Hvad er en selvstartende motor?
De selvstartende motorer er de motorer, der kører automatisk uden yderligere kraft eller ekstern kraft.
I denne artikel, oversigten over Schrage motor arbejder , kredsløbsdiagram over Schrage-motor, effektfaktorkontrol og hastighedskontrol, fordele, ulemper og applikationer diskuteres. Her er et spørgsmål til dig, hvad er typerne af en induktionsmotor?