Interfacing DC-motor til mikrokontrolleren er et meget vigtigt koncept i mange industrielle og robotapplikationer. Ved at forbinde jævnstrømsmotor med mikrokontrolleren kan vi styre motorens retning, styre motorens hastighed. Denne artikel beskriver dig, Hastighedskontrol af jævnstrømsmotor ved hjælp af 8051microcontroller ved hjælp af Bluetooth Android-controller. Blokdiagrammet er vist nedenfor.

Blokdiagram over hastighedskontrol af jævnstrømsmotor med Android-applikation
Hastighedskontrol af jævnstrømsmotor med Android-applikation
Hastighedskontrol af jævnstrømsmotor ved hjælp af Android-mobil har mange applikationer som industrielle applikationer, rulletrapper, elevatorer, robotapplikationer og sikkerhedssystemapplikationer. Brugeren skal installere en Android-applikation på sin Android-smartphone.
Brugeren kan sende anvisninger for at kontrollere hastigheden på jævnstrømsmotoren. Bluetooth trådløs kommunikation bruges til at sende kommandoer til brugeren og controlleren. De vigtigste hardwarekomponenter i kredsløbet er 8051 Microcontroller, motordriver L293D IC, DC-motor, Bluetooth-modul og Android-smartphone.
Se dette link for at vide mere om 8051 Mikrocontroller historie og grundlæggende
Den maksimale udgangsstrøm for mikrocontroller-stiften er 15mA ved 5V, men det får ikke DC-motoren til at fungere, og selv den bageste EMF (elektromotivkraft), som produceres af motoren, kan skade mikrocontrolleren.
Derfor er det ikke værd at interface DC-motor direkte til mikrokontrolleren. Så motor driver kredsløb (L293D IC) er vant til interface DC-motor og mikrokontroller .
Motordriver (L293D)
L293D er et dobbelt H-bro motor driver integreret kredsløb (IC). Motordrivere fungerer som strømforstærkere, da de tager et styresignal med lav strøm og giver et signal med højere strøm. Dette signal med højere strøm bruges til at drive motorerne. L293D indeholder to indbyggede H-bridge-driverkredsløb . I sin almindelige driftsform kan to jævnstrømsmotorer køres samtidigt, både i fremad og baglæns retning. Motorfunktionerne i to motorer kan styres ved hjælp af inputlogik ved ben 2 & 7 og 10 & 15.
Input logik 00 eller 11 stopper den tilsvarende motor. Logic 01 og 10 roterer den henholdsvis med uret og mod uret. Aktiver stifter 1 og 9 (svarende til de to motorer) skal være høje for at motorerne kan begynde at køre. Når en aktiveringsindgang er høj, bliver den tilknyttede driver aktiveret.
Som et resultat bliver outputene aktive og arbejder i fase med deres input. Tilsvarende, når aktiveringsindgangen er lav, er denne driver deaktiveret, og deres udgange er slukket og i højimpedanstilstand. Stiftdiagrammet og den interne struktur af L293D IC er vist nedenfor.

Stiftdiagram og intern struktur af L293D IC
Hvad er Android?
Det Android-operativsystem fungerer baseret på Linux, det er primært designet til berøringsfølsomme mobilenheder såsom smartphones og tablet-computere. En af de mest anvendte mobile OS i disse dage er Android. Android er software, der blev grundlagt i Palo Alto i Californien i 2003.

Android mobil
Android er et kraftfuldt operativsystem, og det understøtter et stort antal applikationer i smartphones. Disse applikationer er mere behagelige og avancerede for brugerne. Den hardware, der understøtter Android-software, er baseret på ARM-arkitekturplatform .
Android er et open source-operativsystem betyder, at det er gratis, og enhver kan bruge det. Android har millioner af apps tilgængelige, der kan hjælpe dig med at styre dit liv på en eller anden måde, og det er tilgængeligt til lave priser på markedet af de grunde, Android er meget populær.
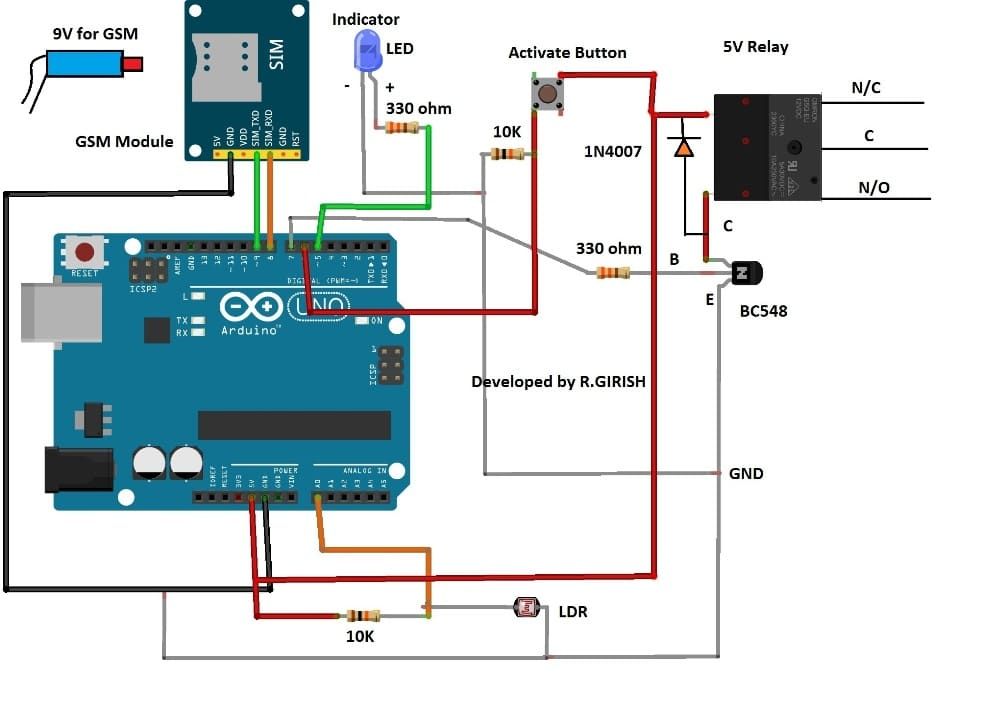
Skematisk diagram Forklaring af hastighedsregulering af jævnstrømsmotor
Skematisk diagram af jævnstrømsmotorhastighedskontrolkredsløb og funktionsforklaring er givet nedenfor.

Skematisk diagram
Kredsløbet bruger standard strømforsyning bestående af en nedadgående transformer fra 230V til 12V og 4 dioder, der danner en bro-ensretter, der leverer pulserende DC, som derefter filtreres af en elektrolytkondensator 470 µF til 1000 µF.
Den filtrerede jævnstrøm er ureguleret, IC LM7805 bruges til at få 5V DC konstant ved sin pin nr. 3. Den regulerede 5V DC filtreres yderligere af en lille elektrolytkondensator på 10 µF for al støj, der genereres således af kredsløbet.
Kontrolsignalet fra Android-enheden sendes via Bluetooth. Dette signal kommunikeres med mikrokontrolleren ved hjælp af sender og modtager af begge enheder. Dette signal betegnes med et enkelt bogstav, der styrer motorens hastighed og retning.
Hvordan styres DC-motorens hastighed? I dette projekt er det primære arbejdsprincip, at PWM-impulser genereres fra den programmerede mikrokontroller for at muliggøre pin 1 i L293D til forøgelse og formindskelse af impulsens arbejdscyklus. Disse driftsimpulser kan føre til at køre jævnstrømsmotoren i den rigtige retning med specifik hastighed.
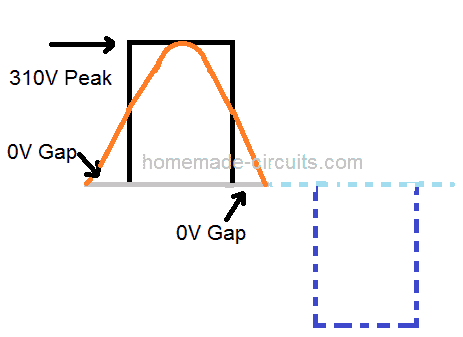
Pulsbreddemodulation
Pulsbreddemodulation opnås fra output fra en mikrocontroller, som er behørigt programmeret til at tage data, der modtages således af en Bluetooth-enhed, der er grænseflade til den. Et Bluetooth-modul er behørigt grænseflade til mikrokontrolleren til tovejs dataflytning, mens programmet udføres til udvikling af PWM-impulser.
Android-applikationen fra enhver smarttelefon kommunikerer via telefonens indbyggede Bluetooth til Bluetooth-modulet, der er forbundet til mikrocontrolleren til operationer efter behov. Pulsbreddemodulationens arbejdscyklus er vist nedenfor.

PWM Duty Cycle
Op-touch-knap på smartphonen, der kører Android-programmet, bruges til at øge PWM's driftscyklus, mens ned-touch-knappen er til at reducere driftscyklussen.

Android-applikation til jævnstrømsmotorhastighedskontrol
Det DC-motor løber gennem L293D-motordriver IC med varierende driftscyklus anvendt for at muliggøre, at pin-1 af L293D tilføres fra mikrocontrolleren til hastighedskontrol. LCD-datapindene er tilsluttet mikrokontrolleren for at vise den hastighedsprocent, som motoren kører med.
Derfor er hastighedskontrol af jævnstrømsmotor ved hjælp af Android-applikationer en omkostningseffektiv, praktisk og den sikreste måde at spare strøm på. En simpel PWM-teknik (Pulse Width Modulation) kan bruges til at kontrollere motorens hastighed. Bølgens driftscyklus styrer dens hastighed. Ved at udveksle outputporte vil det effektivt ændre motorens retning.
Desuden giver eventuelle spørgsmål vedrørende denne artikel dine værdifulde forslag ved at kommentere i kommentarfeltet nedenfor. Her er et spørgsmål til dig, hvad er applikationerne af DC Motor interface til en Microcontroller?