Vi ved, at robotter er avancerede og yderst intelligente elektromekaniske enheder, der kan udføre en række daglige opgaver. Denne enhed er i stand til at reagere på sine omgivelser og foretage handlinger for at opnå en specifik opgave. Robotter er lavet med forskellige komponenter, men en af de væsentlige komponenter er aktuatoren. Generelt bruges aktuatorer i næsten alle maskiner omkring os som elektroniske adgangskontrolsystemer, mobiltelefonvibratorer, husholdningsapparater, køretøjer, robotter og industrielle enheder. De generelle aktuatoreksempler er; elektriske motorer , stikskruer, stepmotorer, muskelstimulatorer i robotter og mange flere. Denne artikel giver kort information om en robot aktuator – arbejde med applikationer.
Hvad er en robotaktuator?
En aktuator, der bruges i robotter til at få robottens hjul til at dreje eller robotarmleddene til at dreje eller til at åbne/lukke robottens griber, er kendt som en robotaktuator. Der er forskellige typer af robotaktuatorer er tilgængelige baseret på den involverede belastning. Generelt er belastningen forbundet med forskellige faktorer som drejningsmoment, kraft, nøjagtighed, driftshastighed, strømforbrug og præcision. Funktionsprincippet for en robotaktuator er at ændre energien til fysisk bevægelse, og de fleste aktuatorer genererer lineær eller roterende bevægelse.
Typer af robotaktuatorer
Robotaktuatorer er klassificeret i to typer i henhold til kravene til bevægelse som lineær bevægelse og rotationsbevægelse.
For lineær bevægelse:
Der er to typer aktuatorer, der bruges i robotter til lineær bevægelsesaktivitet, de er; lineære aktuatorer og solenoide aktuatorer.
Lineære aktuatorer
Lineære aktuatorer i robotteknologi bruges til at skubbe eller trække robotten som at bevæge sig fremad eller bagud og armforlængelse. Denne aktuators aktive ende er simpelthen forbundet til robottens håndtagsarm for at aktivere denne bevægelse. Disse aktuatorer bruges i en række applikationer i robotindustrien.

Magnet aktuatorer
Solenoidaktuatorer er lineære aktuatorer til specielle formål, der inkluderer en magnetlås, der virker på elektromagnetisk aktivitet. Disse aktuatorer bruges hovedsageligt til at styre robottens bevægelse og udfører også forskellige aktiviteter såsom start og tilbage, lås, trykknap osv. Solenoider bruges normalt til anvendelser af låse, ventiler, låse og trykknapper, som er styret normalt af en ekstern mikrocontroller.


For roterende bevægelse:
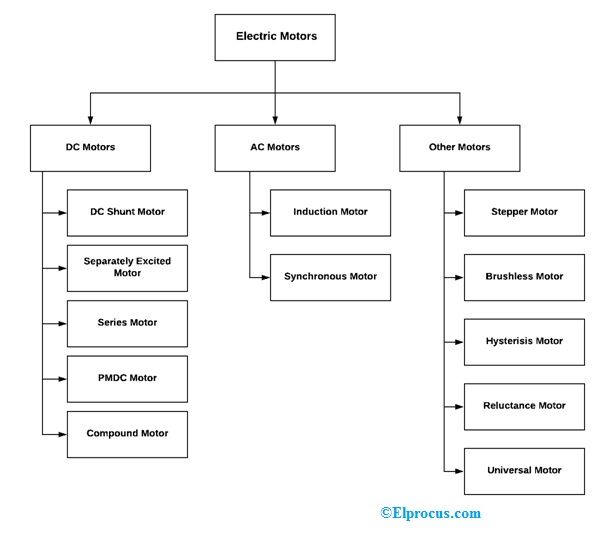
Der er tre typer aktuatorer, der bruges i robotter til roterende bevægelsesaktivitet, de er; DC-motor, servomotor og stepmotor.
DC motor aktuatorer
DC-motoraktuatorer bruges generelt til at dreje robotbevægelser. Disse aktuatorer fås i forskellige størrelser med evne til at generere moment. Den kan således bruges til at ændre hastigheden gennem roterende bevægelser. Ved at bruge disse aktuatorer udføres forskellige aktiviteter som robotboring og robotdrevne bevægelser.

Servo aktuatorer
Servomotoraktuatorer i robotteknologi bruges hovedsageligt til at styre og overvåge roterende bevægelse. Disse er meget overlegne DC-motorer, der tillader 360 graders rotation, men kontinuerlig omdrejning er ikke obligatorisk. Denne aktuator tillader ganske enkelt stop under en roterende bevægelse. Ved at bruge denne aktuator, aktiviteten som pick and place udføres . At vide, hvordan en Vælg N Place-robot værker klik på linket.

Steppermotoraktuatorer
Steppermotoraktuatorer er nyttige til at bidrage til gentagne roterende aktiviteter i robotter. Så disse typer aktuatorer er en kombination af både DC- og servomotoraktuatorer. Disse stepmotoraktuatorer bruges i automatiseringsrobotter, hvor repeterbarhed af aktivitet er nødvendig.

Robotaktuatordesign
Vi ved, at der er forskellige typer aktuatorer, der bruges i robotter. Her skal vi diskutere, hvordan man designer en lineær aktuator, der bruges i robotteknologi til at ændre roterende bevægelse til en træk/skub lineær bevægelse. Så denne bevægelse kan bruges til at glide, slippe, vippe eller løfte materialer eller maskiner. Disse aktuatorer giver ren og sikker bevægelseskontrol, der er meget effektiv og vedligeholdes fri.

Strøm
Den første overvejelse, når man designer en robotaktuator, er Power. For at opnå mekanisk strømudgang er det vigtigt at have strøm ind. Så mængden af mekanisk strømudgang kan defineres af den belastning eller kraft, der skal flyttes.
Duty Cycle
Duty cycle kan defineres som, hvor ofte aktuatoren vil arbejde, og hvor lang tid den vil bruge. Driftscyklussen bestemmes af aktuatorens temperatur, når den er i bevægelse, da strømmen går tabt under hele varmen.
Når alle aktuatorerne ikke er ens, er der en forskel i deres driftscyklusser. Endnu en faktor er belastningen, hvilket især gælder for DC-motorer, mens andre faktorer, der kan bestemme driftscyklussen, er belastningsegenskaber, alder og omgivelsestemperatur.
Effektivitet
Aktuatorens effektivitet hjælper simpelthen med at forstå, hvordan den vil fungere, mens den er i drift. Så aktuatorens effektivitet findes ved at adskille mekanisk strøm genereret af elektrisk strøm.
Aktuatorens levetid
Der er mange faktorer, der vil forlænge aktuatorens levetid er; forblive i den nominelle driftscyklus, reducere sidebelastningen og forblive i den anbefalede spænding, kraft og ekstreme miljøer.
Arbejder
Robotaktuatorer er hovedsageligt designet til brugervenlighed og effektivitet. Designet af en lineær robotaktuator er det skrå plan, der starter med en blyskrue med gevind. Denne skrue giver en rampe til at generere kraft, der arbejder sammen med en større afstand til at flytte enhver belastning. Hovedformålet med robotaktuatordesign er at give træk/skubbebevægelse. Så den nødvendige energi til at give bevægelsen er manuel eller enhver energikilde som elektricitet, væske eller luft. Disse aktuatorer bevæger sig generelt autostole frem og tilbage, åbne automatiske døre, computerdiskdrev åbner og lukker.
Robotaktuatorfejl
Robotaktuatorfejlen opstår hovedsageligt af mange årsager. Så disse aktuatorer kan opleve forskellige fejl som fastsiddende led eller låste, fritsvingende led og helt eller delvist tab af aktiveringseffektivitet. Så disse fejl vil påvirke robottens adfærd, hvis robottens controller ikke er designet med tilstrækkelig fejltolerance.
Hvordan vælger man en aktuator til din robot?
Robotaktuatorer bruges til forskellige formål, så der er mange aspekter at overveje, når du vælger aktuatorer som
Formål og tilsigtet funktionalitet
Den nødvendige aktuatortype til en specificeret anvendelse afhænger hovedsageligt af formålet med en robot samt den tilsigtede funktionalitet.
Fysiske krav og begrænsninger
Når som helst typen af aktuator besluttes at bruge, skal udviklere se på de fysiske krav og begrænsninger. Fordi aktuatorens vægt og fysiske størrelse spiller en nøglerolle, når aktuatoren placeres i robotten, ellers kan en tung aktuator på en lille robotarm få armen til at svigte i sin egen vægt.
Styrke & Kraft
Baseret på deres særlige brug skal udviklere sikre styrken og kraften af en specificeret aktuator til at udføre opgaven.
Kommunikationsprotokol
Kommunikationsprotokollen bør også overvejes, når du vælger en aktuator til robotten. Mange aktuatorer understøtter simpelthen kommunikation med PWM (pulsbreddemodulation), mens nogle aktuatorer understøtter seriel kommunikation.
Monteringsplads og muligheder
Udviklere bør verificere den monteringsplads, der kan opnås i eller på robotten, og de monteringsmuligheder, som aktuatoren selv giver. Fordi nogle typer aktuatorer er tilgængelige med separat monteringshardware, der giver dig mulighed for at montere enheden i forskellige retninger, mens andre er tilgængelige med integrerede monteringspunkter, som er installeret i en bestemt position og orientering.
Fordele
Robotaktuator fordel s omfatter følgende.
- Mindre omkostninger
- Dens vedligeholdelse er let.
- Disse er nøjagtige.
- Let at styre.
- Effektkonverteringseffektiviteten er høj.
- Sikker og enkel at betjene
- Mindre støj.
- Disse er meget rene og mindre forurening til atmosfæren.
- Disse er meget nemme at vedligeholde.
Robotaktuator ulemper omfatte følgende.
- Overophedning under faste forhold.
- Behov for særlig sikkerhed i brandfarlige miljøer.
- Har brug for god vedligeholdelse.
- Væskelækage vil skabe økologiske problemer.
- Højt og støjende.
- Mangel på nøjagtighedskontrol.
- Disse er meget følsomme over for vibrationer.
Robotaktuatorapplikationer
Anvendelsen af robotaktuatorer omfatter følgende.
- Aktuatoren er en meget væsentlig komponent i robotteknologi, som ændrer den eksterne energi til fysisk bevægelse afhængigt af styresignalerne.
- De elektriske aktuatorer i robotteknologi bruges til at ændre den elektriske energi til roterende eller lineær bevægelse
- Aktuatorer genererer kræfter, som robotter bruger denne kraft til at flytte sig selv og andre genstande.
- Aktuatorer er forbundet med robotter, enheder eller protesearme, som skal bevæge sig og bøjes.
- De lineære aktuatorer inden for robotteknologi ændrer elektrisk energi til lineær bevægelse.
- En aktuator er ansvarlig for at styre og flytte et system eller en mekanisme.
Det her handler altså om en robot aktuator – arbejder med ansøgninger. Aktuatoren i en robot er en vigtig komponent, der fungerer som leddet for robotten til at bevæge robotten rotere, arm op og ned og den ændrer energi til mekaniske bevægelser . Den mest almindelige energikilde til at drive aktuatorer er elektricitet, men pneumatisk og hydraulisk energi kan også bruges. Så nogle unikke hydraulisk drevne aktuatorer bruges til at generere høj effekt og er stødbestandige. Her er et spørgsmål til dig, hvad er de forskellige komponenter, der bruges i robotter?