

Industriel automatisering og kontrol
I dag industrielle automatiseringssystemer er blevet populære i mange af brancherne og spiller en afgørende rolle i styringen af flere procesrelaterede operationer. På grund af implementeringen af en lang række industrielle netværk med deres geografiske fordeling over fabrik eller industri er kapacitet til overførsel og styring af gulvedata blevet mere sofistikeret og let lige fra lavt niveau til højt niveau kontrol. Disse industrielle netværk dirigeres gennem forskellige feltbusser, der bruger forskellige kommunikationsstandarder som CAN-protokol, Profibus, Modbus, Device net osv. Så lad os se på, hvordan CAN-kommunikation fungerer til automatisering af industrier og andre automatiseringsbaserede systemer .
Introduktion til industriel automatisering og kontrol
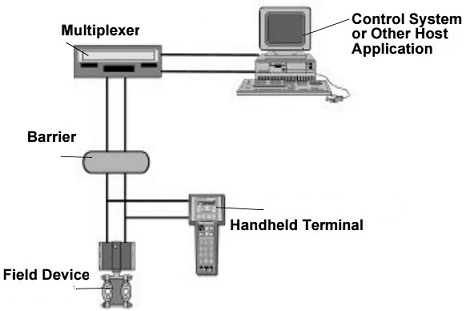
Nedenstående figur viser arkitekturen for industriel automatisering og kontrol, hvor tre kontrolniveauer udføres for at automatisere hele systemet. Disse tre niveauer er kontrol og automatisering, proceskontrol og højere ordrekontrol. Kontrol- og automatiseringsniveauet består af forskellige feltapparater som sensorer og aktuatorer til at overvåge og kontrollere procesvariablerne.

Industriel automatiseringsarkitektur
Process Control Level er en central controller, der er ansvarlig for at kontrollere og vedligeholde flere styreenheder som f.eks Programmerbare logiske controllere (PLC'er) , og også brugergrafiske grænseflader som SCADA og Human Machine Interface (HMI) er også inkluderet i dette niveau. Kontrolniveauet for højere ordrer er et virksomhedsniveau, der styrer alle forretningsrelaterede operationer.
Ved nøje at overholde ovenstående diagram og dens hvert niveau og også mellemliggende niveauer kommunikationsbusser som Profibus og industrielt Ethernet ses som forbundet til at udveksle oplysningerne. Derfor er kommunikationsbussen den vigtigste komponent i industriel automatisering til pålidelig overførsel af data mellem controllere, computere og også fra feltapparaterne.
Kontrolområde netværk eller CAN-protokol

OSI-model (Open Systems Interconnection)
Datakommunikation er overførsel af data fra et punkt til et andet. For at understøtte industriel kommunikation har International Organization for Standardization udviklet Open Systems Interconnection (OSI) model til at levere dataoverførsel mellem forskellige noder. Denne OSI-protokol og ramme afhænger af producenten. CAN-protokollen bruger to nederste lag, dvs. fysiske lag og datalinklag ud af de syv lag i OSI-modellen.
Et Controller Area Network eller CAN-protokol er en multi-master seriel kommunikationsbus , og det er et netværk af uafhængige controllere. Den nuværende version af CAN har været i brug siden 1990, og den blev udviklet af Bosch og Intel. Den sender meddelelser til de noder, der præsenteres i et netværk, ved at tilbyde en transmissionshastighed på op til 1 Mbps. For en effektiv transmission følger den pålidelige fejldetektionsmetoder - og til voldgift om meddelelsesprioritet og kollisionsdetektering bruger den carrier sense multiple access-protokol. På grund af disse pålidelige dataoverførselsegenskaber har denne protokol været i brug i busser, biler og andre bilsystemer, fabriks- og industriel automatisering, minedrift, osv.
CAN-dataoverførsel
CAN-protokol er ikke en adressebaseret protokol, men beskedorienteret protokol, hvor den integrerede meddelelse i CAN har indholdet og prioriteten af data, der overføres. Oven på modtagelsen af data på bussen beslutter hver node, om de skal kassere eller behandle dataene - og afhængigt af systemet er netværksmeddelelsen bestemt til en enkelt node eller mange andre noder. CAN-kommunikation tillader en bestemt node at anmode om information fra enhver anden node ved at sende RTR (Remote Transmit Request).

CAN-protokol dataoverførsel
Det tilbyder automatisk voldgiftsfri transmission af data ved at overføre meddelelsen med højest prioritet og bakke op og vente på meddelelsen med lavere prioritet. I denne protokol er den dominerende en logisk 0, og den recessive er en logisk 1. Når en node transmitterer en recessiv bit, og en anden sender en dominerende bit, så vinder den dominerende bit. En prioritetsbaseret voldgiftsordning afgør, om der vil blive givet tilladelse til at fortsætte transmission, hvis to eller flere enheder begynder at sende på samme tid.
CAN-meddelelsesramme
Et CAN-kommunikationsnetværk kan konfigureres i forskellige ramme- eller meddelelsesformater.
- Standard- eller basisrammeformat eller CAN 2.0 A.
- Udvidet rammeformat eller CAN 2.0 B

Standard- eller basisrammeformat eller CAN 2.0 A.
Forskellen mellem disse to formater er, at længden af bit, dvs. basisrammen understøtter 11-bit længde for identifikatoren, mens den udvidede ramme understøtter 29-bit længde for identifikatoren, som består af 18-bit udvidelse og en 11-bit identifikator. IDE-bit adskiller CAN-udvidet rammeformat og CAN-basisrammeformat, hvor IDE transmitteres som dominerende i en11-bit rammekasse og recessiv i en 29-bit rammekasse. Det er også muligt at sende eller modtage meddelelser i basisrammeformat af nogle CAN-controllere, der understøtter formater med udvidet ramme.

Udvidet rammeformat eller CAN 2.0 B
CAN-protokollen har fire typer rammer: dataramme, fjernramme, fejlramme og overbelastningsramme. Dataramme indeholder transmission node data remote frame anmodninger specifik identifikator transmission fejl frame detekterer eventuelle node fejl, og overload frame aktiveres, når systemet injicerer forsinkelse mellem data eller remote frame. CAN-kommunikation kan teoretisk forbinde op til 2032 enheder på et enkelt netværk, men praktisk talt er det begrænset til 110 noder på grund af hardwaretransceiverne. Det understøtter kabler op til 250 meter med en baudhastighed på 250 Kbps med en bithastighed på 10 Kbps er den maksimale længde på 1 km, og den korteste med 1 Mbps er 40 meter.
Industriel automatisering og kontrol ved hjælp af CAN-protokol
Det her projekt implementeres for at kontrollere industrien belastninger, der køres af jævnstrømsmotor baseret på temperaturvariationerne i processen. Forskellige proceskontrolsystemer er afhænger af temperaturen. Antag, at i tilfælde af en omrørerbeholder - efter at have nået en bestemt temperatur - skal DC-motoren være tændt for at rotere omrøreren. Så dette projekt opnår dette ved brug af CAN-protokol, som er yderst effektiv og pålidelig billig kommunikation.
To mikrokontroller bruges i dette projekt, den ene til at indhente temperaturdata og den anden til styring af jævnstrømsmotoren . CAN Controller MCP2515 og CAN transceiver MCP2551 er forbundet til begge mikrocontrollere for at implementere CAN-kommunikation til udveksling af data.

Industriel automatisering og kontrol ved hjælp af CAN-protokol
Den transmitterende sidemikrocontroller overvåger kontinuerligt temperaturerne ved brug af LM35 temperatur måler ved at konvertere analoge værdier til digitale med ADC knyttet til det. Disse værdier sammenlignes med de indstillede værdier, der er programmeret i mikrokontrolleren, og disse værdier overtrædes, når mikrokontrolleren sender eller sender dataene til modtageren sidemikrocontroller af CAN-controller og transceiver-enheder.
Modtagersiden CAN-kommunikation modtager dataene og overfører dem til mikrocontrolleren, der yderligere behandler dataene og styrer DC-motoren ved hjælp af en motor-driver-IC. Det er også muligt at ændre retning af motoren med driver IC styret af mikrokontrolleren.
CAN-protokollen muliggør således peer-to-peer-kommunikation ved at forbinde forskellige noder i et industrielt miljø. Denne type kommunikation kan også implementeres i andre automatiseringssystemer som hjemme eller bygning , fabrik osv. Vi håber, at denne artikel muligvis har givet dig en bedre forståelse af industriel automatisering med CAN-kommunikation. Skriv til os for yderligere information og forespørgsler.
Fotokreditter:









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}