I dette indlæg lærer vi et baglæns timer-kredsløb til drift af en inkubator-motormekanisme med et foretrukket sæt bevægelser. Idéen blev anmodet om af Mr. Anwar
Tekniske specifikationer
Jeg er fra Indonesien ..... Jeg har brug for skemaer til inkubator-timer med motor med højt moment (jævnstrømsmotorens vindue i bilen). Jeg forsøger at få en jævnstrømsmotor til at køre i to retninger, indtil den når slutpositionen, og stop derefter og skift polaritet, så den vil køre den anden retning, når strømmen tilføres igen. Gør derefter det samme i den anden ende.
1. timer tænder for strømmen i 1 min. (7:00 - 07:00)
2. motor kører i en retning, indtil den rammer stoppositionen, siger 30 sek.
3. strømmen til motoren slukker, når den rammer stoppositionen og forsinkes i 1 min. timer til at afslutte / slukke for strømmen. vender også polaritet, så.
4. næste gang hovedtimeren tændes (10: 00-10: 01), doserer den samme ting i omvendt retning og gentages kontinuerligt
5. 12 VDC motor baglæns (kun to ledninger fra motor + og -)
6. Ledningsindikator til Rev / Fwd motor
Kan du hjælpe mig Sir?
På forhånd tak for enhver hjælp.
Dette er et vigtigt hjemmeprojekt, der skal være 100% pålideligt.
Designet

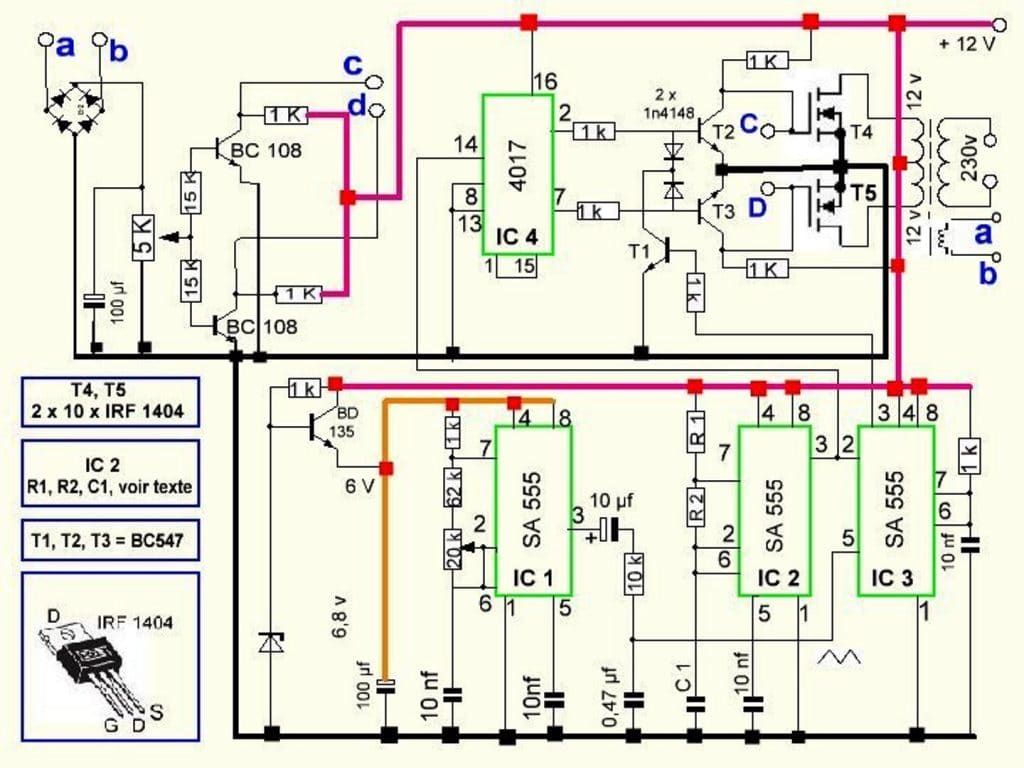
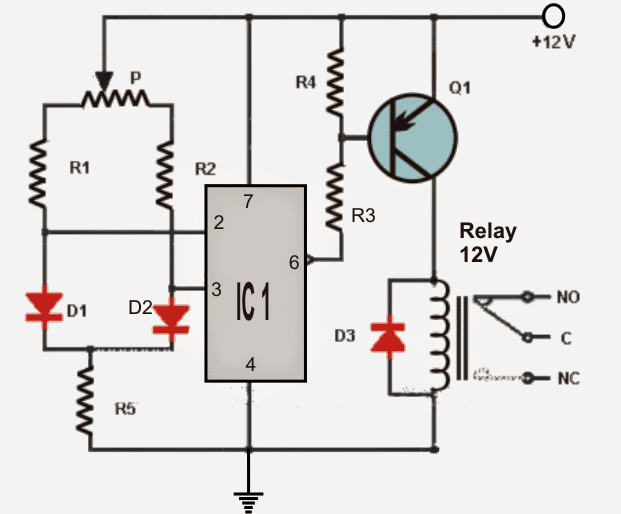
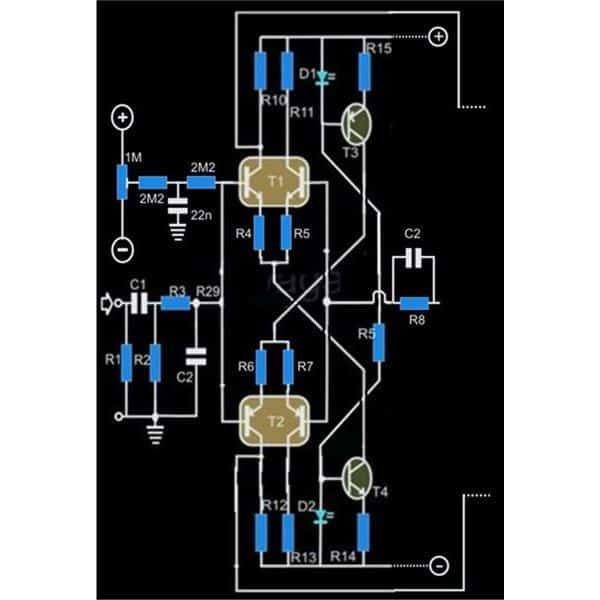
I figuren ovenfor kan vi visualisere et design til implementering af den foreslåede baglæns bevægelse af en inkubatormotor efter et forudbestemt sæt tidsinterval.
På det øjeblik, hvor der tændes for strømmen, har vi følgende scenarie:
Den magnetiske afbryder til 'indstillet' kan antages at være i deaktiveret tilstand eller nedtrykket, mens motoren eller den designede inkubatormekanisme er i sin nul startposition.
Vær opmærksom på, at fortrinsvis 'sæt' / 'reset'-switchene skal implementeres ved hjælp af magnetiske reed-switche.
Når strømmen er tændt, nulstilles IC 4060 via C2, så den starter sin optællingsproces fra nul, og pin3 gengives til en nul-logik.
Denne indledende nul-logik tilføres via C3 til basen af T1, som øjeblikkeligt fører til at tvinge T3 og dets tilknyttede relæ til at aktivere. R7 sørger i processen for, at T1 / T3 bliver låst i denne tilstand.
DPDT-relæet aktiveres på dette tidspunkt ved sine N / O-kontakter, der starter motoren og mekanismen mod en antaget 'fremad' bevægelse.
Så snart motoren begynder at bevæge sig, frigøres 'sæt' -knappen, således at T4 og den øvre SPDT får mulighed for at aktivere, hvor SPDT-relæet opnår en N / O-positionskift, hvilket gør DPDT's N / C-kontakter med standby levere..
Motoren og / eller mekanismen bevæger sig, indtil den har nået 'nulstillingspositionen, hvilket får T2 til at aktivere og bryde T1 / T4-låsen.
Når T4 er slukket, ændrer DPDT-relæet sin position fra N / O til N / C og giver en modsat (omvendt) bevægelse til motormekanismen.
Inkubatormotormekanismen vender nu sin retning og initierer en omvendt bevægelse, indtil den har nået det 'indstillede' punkt, der hurtigt slukker for basisdrevet på T4, SPDT slukker for DPDT's skæreeffekt, og hele mekanismen står stille .
I mellemtiden fortsætter IC 4060 med at tælle, indtil den endnu en gang har produceret en nul-logik efter at have gennemgået en høj logik ved sin pin3 (ved at aflade C3).
Cyklussen starter igen og gentager proceduren som forklaret ovenfor.
Forrige: Blinkende en LED med Arduino - Komplet vejledning Næste: High Power Industrial Mains Surge Suppressor Explored