Indlægget diskuterer omfattende en grundlæggende Arduino-kodeimplementeringsvejledning til at blinke dens indbyggede LED. Dataene blev bygget, testet og skrevet af Jack Franko.

KODE: for simpelthen indbygget LED på pin 13 i ARDUINO BOARD er det som standard programmeret til at blinke ofte ved 50 Mili sekunder, da det i beskrivelsen angives asms (millisekunder).
/ * første enkle
Program på Arudino AF JACKFRANKO * /
int l = 13
//where l is pin 13void setup(){ pinMode
(l,OUTPUT) }void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
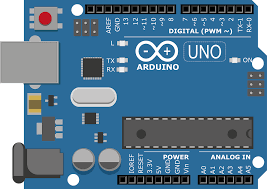
Bemærk: Da vi studerer en Arduino UNO R3 Board-programmering, hvis du ikke er programmør, designer eller hobbyist, skal du som studerende starte med det grundlæggende.
Den første ting er at forstå Arduino Uno R3 ved at få et sæt, der er tilgængeligt i onlinebutikker.
Beskrivelse:
som af tradition er det at få vores navn inden programmet starter er en god IDEA, her er mit første grundlæggende program, der er angivet ovenfor, startede med dette tegn / * og teksten på navnet og alle de ting, du vil skrive imellem det * / er, som ikke påvirker programmet, og det er ikke en del af programmet, fordi Arduino-programmet Compiler ved, at tingene mellem “/ *, * /“ -mærket skal springe over, det er bare titlen på programmet.
/ * første enkle
Program på Arudino AF JACKFRANKO * / Next Line int l = 13
// hvor l er pin 13
Det er en erklæringsdel af programmet, hvor vi skal erklære heltalet med kommandoen “int” efterfulgt af lille alfabet L, som er lig med 13 og sluttede med semikolon derefter efter dobbelt skråstreg “//” og noget tekst.
Her havde vi givet kommandoen 'int', som vi normalt siger heltal og lille L lig med 13, og vi sluttede med semikolon her, vi sagde til kompilatoren, at værdien 'l' er lig med 13, som er placeret ved pin nr. tretten på arduino-tavlen, her er “l” bare en værdi, der er angivet til pin 13, at “l” ikke er nogen funktion eller script til compiler, det er for os at gøre koden lidt venlig, at “l” i dette projekt er en forkortelse for LED.
Jeg vil gøre koden lidt mindre og spare plads. På dette tidspunkt, hvis du ikke vil beholde det som “l”, så sig at du vil beholde det for dvs “mig”, så i hele koden, hvor der altid er “l”, skal du ændre det “mig” ellers compileren fungerer ikke, og det giver dig fejl.
Denne erklæring består af anden del, der efterfølges af '//' og en eller anden tekst her, vi skal forstå, at uanset udsagn efterfølges af '//' ved åbningen og ikke havde nogen lukning, vil kompilatoren ikke læse denne erklæring. Det kan være i flere linjer uden at lukke. Dette er for os at give nogle henvisninger og noter i kode til forståelse.
Før vi forstår resten af koden, skal vi forstå de grundlæggende funktioner i koden, og som er 'ugyldig opsætning' og 'ugyldig sløjfe', her er disse to funktioner meget vigtige, fordi vi skal erklære vores INPUT, OUTPUT og hvilken type arbejde gjort ved i det. så lad os starte med ugyldig opsætning, dette er en del af koden, hvor vi skal angive vores INPUTS & OUTPUTS, som skal køre en gang for vores projekt. Her skal vi kun tale om en output i henhold til vores kode.
Den anden funktion ugyldige løkke er den anden del af koden, der skal køre i form af løkke. her består disse begge funktioner af kurvebeslag åben og lukket, og derefter efter åben krøllet beslag holder nogle kode og krøllet beslag tæt. Jeg vil give oplysninger om disse beslag i næste program. her skal vi fokusere på krøllede parenteser, hvor vi har en kode indeholdt mellem disse parenteser.
void setup(){ pinMode
(l,OUTPUT) }
Her har vi angivet den funktion, der skal køre en gang for vores projekt og det som vores output. hvis du har bemærket, at vi har skrevet vores kode i krøllede parenteser, hvor vi har erklæret, at pinMode l udgives i kurveparenteser og sluttede med semikolon,
her pinMode er funktion betegnet som heltal l som OUTPUT.
Derfor er jeg betegnet som pin nr. 13 på arduino-compileren, vil forstå at pin nr. 13 kaldes l og l er pin nr. 13, hvis vi sætter 13 på stedet for l efter PinMode-funktionen
som output vil det betragte både 13 såvel som l.
hvis vi sletter int l = 13, betragter det ikke alfabetet l, og det giver dig en fejl. Her havde vi sat pin
nr. 13, som er alfabetet l som output, det er altid skrevet med store bogstaver som OUTPUT og funktion pinmode er skrevet i pinMode startende med lille bogstav uden mellemrum, andet ord Mode startende med store bogstaver, som forstås af kompilatoren, der er store og små bogstaver
Dernæst kommer vi til loop-mode i vores program her angiver vi al den funktion, der skal køre i loop
i ubegrænset lang tid.
void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
Her havde vi erklæret heltal l til HIGH med funktionen digitalWrite. Denne erklæring digitalWrite vil gøre heltal l HIGH betyder hvornår PÅ det vil vende PÅ pin no13 på Arduino-kort, som vi havde sagt pin nr. 13 er l, der er adskilt med komma i kurveparenteserne.
Her efter sagde vi, at forsinkelse (50) tæller denne sætning tid i ms (millisekund), hvor 1000 ms er lig med 1 sekund. I dette program vil jeg have, at min ledelse blinker 20 gange i et sekund matematisk beregning
gav mig en værdi 50, der er lukket i parentes.
Dette betyder, at under linjesektionen vil første linje tænde min LED, der er placeret på pin nr. 13, og vente på 5 ms. Hvis vi ikke giver yderligere funktion til at sløjfe for at slukke for LED, forbliver den TÆNDT.
Selvom vi havde sagt den forsinkelse på 50 ms. Så vi har givet en kommando om at slukke for LED'en
i digitalWrite (l, LOW) , efter angivelse af denne erklæring vil LED ikke slukke, fordi sløjfen er ufuldstændig uden forsinkelse (50) først tænder vi lysdioden, så venter vi på 50 ms, derefter slukker vi LED og derefter venter vi på 50 ms for at fuldføre den ene løkke, der skal spille en infintely, så længe Arduino er tændt. Det tænder og slukker for din led på pin nr
13 i 20 gange pr. Sekund.
Forrige: SPDT Solid State DC Relay Circuit ved hjælp af MOSFET Næste: Inkubator Reverse Forward Motor Controller Circuit