I denne æra af industriel automatisering , robotter bruges til at håndtere forskellige processer for præcis og bedre produktionskvalitet. At vælge den ideelle motor til den perfekte robot er altid en hård opgave, mens robotten designes især til industrier. Korrekt valg af elektriske motorer i industrielle robotter kræver flere parametre for at tage hensyn til armkontrol, position, vinkel og lineære bevægelser.

Motorer, der anvendes i industriel robotik
Motorvalg er det mindste forståede koncept for robotteknikere, der kræver strategisering og seriøs analyse. Det involverer bestemmelse af robotens hastighed, acceleration, drejningsmomentkrav baseret på robotvægt, hjulstørrelse og anvendelse, hvor det skal implementeres. Der er mange typer motorer er tilgængelige i dagens marked, men for det meste Tiny pager-motorer, servomotorer , lineære motorer, stepmotorer og DC-gearmotorer bruges i industrielle robotter i henhold til deres anvendelsesområde.
Forkert valg af motor ender med en handicappet robot, så hvilken type motor er bedst og velegnet til at gøre industrielle robotter reelle, nøjagtige og tilstrækkelige til at imødekomme alle industrielle procesbehov med tanke på alle realistiske specifikationer?
Her har vi samlet nogle indsigter fra disse motorer fra industrielle fagfolk til at vælge den tilsvarende motor, der skal vælges til industrielle applikationer.
Vi opfordrer dig til at følge eksperternes udtalelser, der sigter mod at levere de bedste motorer til industriel robotik med tilgængelige DC-, stepper-, børsteløse og servomotorer til præcise, omkostningseffektive og pålidelige bevægelser af robotten.
Ch.Sampath Kumar
M.tech i VLSI Design
Teknisk indholdsforfatter
 Jævnstrømsmotorer fås i brede intervaller til kontinuerlig drift, men det kræver gearreduktioner for at passe til den tilsvarende anvendelse. Trinmotor kræver ingen reduktion af gearet, da den trinvise drift giver lav hastighed til specificerede applikationer. Endelig bruges servomotorer til præcis og nøjagtig kontrol, som implementeres i lukkede kredsløb. Men det kræver ekstra feedback og kørekredsløb, så det er dyrt end DC og stepper motor. Så servomotorer gør robotten mere pålidelig på grund af dens nøjagtige bevægelse.
Jævnstrømsmotorer fås i brede intervaller til kontinuerlig drift, men det kræver gearreduktioner for at passe til den tilsvarende anvendelse. Trinmotor kræver ingen reduktion af gearet, da den trinvise drift giver lav hastighed til specificerede applikationer. Endelig bruges servomotorer til præcis og nøjagtig kontrol, som implementeres i lukkede kredsløb. Men det kræver ekstra feedback og kørekredsløb, så det er dyrt end DC og stepper motor. Så servomotorer gør robotten mere pålidelig på grund af dens nøjagtige bevægelse.
Viswanath Prathap
M.Tech i elektroteknik
Teknisk indholdsforfatter

Vælg og placer robotter findes typisk i brancher til at vælge et objekt fra en position eller et sted og placere det på en anden position eller et andet sted. Til dette formål er det nødvendigt at styre vinkelbevægelser af leddene på robotterne, hvilket kan opnås ved hjælp af servomotorer. Disse servomotorer styres ved hjælp af PWM-data, der gives af robotstyringen til aktivering af leddene på robotter. Servomotorer er i stand til at generere tilstrækkeligt drejningsmoment til at bevæge en genstand hurtigt fra standsningsposition. Disse bruges således som hjul i militære og industrielle robotbiler. Trinmotorer kan også bruges til at kontrollere positionen, men disse vil forbruge strøm selv i hvileperioden for bare at låse og holde den kommandoposition. Så servomotorer bruges typisk i industriel robotik som en højtydende erstatning for trinmotorer.
S. Naresh Reddy
M.tech i Embedded System
Projektguide
Strukturen af den mekaniske robot skal styres til perfo  rm opgave. Der er tre forskellige faser til kontrol af robotten, såsom opfattelse, behandling og handling. Sensorer giver informationen om placeringen af dens led og dens sluteffekt til robotten, derefter behandles denne information til styreenheden og beregner det passende signal til motoren, der bevæger sig mekanisk. Det store flertal af robotter bruger elektriske motorer. Gentagne børsteløse og børstede jævnstrømsmotorer bruges i bærbare robotter, og vekselstrømsmotorer bruges i industrielle robotter. Disse motorer foretrækkes i systemer med lettere belastninger, og hvor den dominerende bevægelsesform drejer rundt.
rm opgave. Der er tre forskellige faser til kontrol af robotten, såsom opfattelse, behandling og handling. Sensorer giver informationen om placeringen af dens led og dens sluteffekt til robotten, derefter behandles denne information til styreenheden og beregner det passende signal til motoren, der bevæger sig mekanisk. Det store flertal af robotter bruger elektriske motorer. Gentagne børsteløse og børstede jævnstrømsmotorer bruges i bærbare robotter, og vekselstrømsmotorer bruges i industrielle robotter. Disse motorer foretrækkes i systemer med lettere belastninger, og hvor den dominerende bevægelsesform drejer rundt.
Suresh megaji
M. Tech i trådløse kommunikationssystemer
Teknisk indholdsforfatter

Hvis du vil være involveret i 'robotik' og deres anvendelse i 'industri', skal du vide om 'motorer', der bruges i robotik, fordi robotteknologi hovedsagelig er afhængig af motorer. Dybest set anvendes 'robotmaskiner' til forskellige applikationer i produktionen. Forskellige 'motorer' som DC, Pulsed, Stepper, Optical drive, Partial turn og hall effect motorer osv ... bruges med nogle teknikker til at anvende dem i branchen og gøre dem venlige, som
- DC-motorer bruges til batteriorienterede applikationer, lavere hastighed, mobilitetsapplikationer.
- Uanset hvor vi har brug for en rotationsorienteret applikation, kan vi bruge trinmotorer som unipolære og bipolære motorer.
- Til bevægelser i hoved og arm kan vi bruge motorer med delvis drejning.
- Hvis vi vil bruge magnetfelter, kan vi bruge Hall Effect og motorer til optisk drev osv.
Ved at bruge robotteknologi, der bruger smarte motorer, kan vi spare penge, tid, plads, farlige bevægelser osv.
Ajay Sahare
Marketingdirektør

Industrielle robotter bruges i et industrielt fremstillingsmiljø. Disse er armene specielt udviklet til applikationer som svejsning, materialehåndtering, maling og andre.
Ikke alle mekatroniske enheder, der bruges i industrielle miljøer, kan betragtes som en robot. Som defineret af ISO betragtes en automatisk kontrolleret, omprogrammerbar, multipurpose manipulator, der kan programmeres i tre eller flere akser, som en industriel robot.
Motorer, der anvendes i industriel robot er
- Vekselstrømsmotorer
- Jævnstrømsmotorer
- Servomotorer
- Stepper Motors.
1. AC-motorer kan yderligere opdeles i asynkrone og synkrone typer. For eksempel er en induktions-AC-motor en enhed af asynkron type, der i det væsentlige består af en trådviklet stator og en rotor. Strøm er forbundet til ledningen, og vekselstrøm, der strømmer gennem den, inducerer et elektromagnetisk (EM) felt i den viklede ledning med et stærkt nok felt, der giver kraften til rotorbevægelse. Synkronmotorer er motorer med konstant hastighed, der fungerer synkroniseret med vekselstrømsfrekvens og bruges ofte, hvor der kræves præcis konstant hastighed.
2. Mange industrielle applikationer, herunder robotik, bruger jævnstrømsmotorer ofte på grund af den lette kontrol af hastighed og retning. De er i stand til et uendeligt hastighedsområde fra fuld hastighed til nul med en bred vifte af belastninger.
Fordi jævnstrømsmotorer har et højt forhold mellem moment og inerti, kan de reagere hurtigt på ændringer i styresignaler. En jævnstrømsmotor kan styres glat til nul bevægelse og øjeblikkeligt accelereres i den modsatte retning uden behov for komplekse strømskiftekredsløb. Permanent-magnet børsteløse DC-motorer er normalt dyrere end børstetyper, selvom de kan give fordele i strømforbrug og pålidelighed.
Uden kommutator kan børsteløse motorer køre mere effektivt og ved højere hastigheder end konventionelle jævnstrømsmotorer. De fleste børsteløse jævnstrømsmotorer kører på en trapezformet vekselstrømsbølgeform, men nogle af motorerne fungerer med sinusbølger. Sinusbølgedrevne børsteløse motorer kan opnå jævn drift ved lavere hastigheder med ringe moment, hvilket gør dem ideelle til slibning, belægning og andre anvendelser såsom overfladebehandling.
I tilfælde af børstede jævnstrømsmotorer, hvis du vil have din motor til at rotere langsommere uden at miste strøm, kan du bruge pulsbreddemodulation (PWM). Dette betyder grundlæggende at tænde og slukke for motoren meget hurtigt. På denne måde roterer motoren med en lavere hastighed, som om der ville blive anvendt lavere spænding uden at tage sig af strømmen.
Dybest set er momentet, der genereres af en børstet DC-motor, for lille, og hastigheden er for stor til at være nyttig. Så gearreduktioner bruges normalt til at reducere hastighed og øge drejningsmoment.
3. Servomotorer anvendes i lukkede kredsløbssystemer med en digital controller. Styringen sender hastighedskommandoer til en driverforstærker, som igen føder servomotoren. En eller anden form for feedbackenhed, såsom en resolver eller en encoder, giver oplysninger om servomotorens position og hastighed. Opløseren eller koderen kan integreres i motoren eller placeres eksternt. På grund af det lukkede system kan en servomotor køre med en bestemt bevægelsesprofil, der er programmeret i controlleren.
4. Trinmotorer kan fungere med eller uden feedback, med motorens rotation opdelt i små vinkletrin. Den styres af pulserende kommandosignaler og kan stoppe præcist ved et kommandopunkt uden behov for bremser eller koblingsenheder. Når strømmen fjernes, forbliver en permanentmagnet-trinmotor generelt i sin sidste position. Flere trinmotorer kan opretholdes synkroniseret ved at køre dem fra en fælles kilde.
Dev desai
Marketingdirektør 
Hvis du planlægger at blive involveret i robotteknologi, skal du gøre dig bekendt med de mange typer motorer, der er til rådighed. Al robotikbevægelse er motoriseret på den ene eller anden måde, så det er vigtigt at vide, hvad din mulighed er.
DC-motorer
Udover at være batteridrevet, bestemmes en jævnstrømsmotors bevægelsesretning af polariteten på strømindgangen. Dette er en absolut nødvendighed for robotfunktioner. Heldigvis kommer denne type motor i en lang række størrelser, spændingskrav og er tilgængelig overalt.
De forskellige typer motorer er som nedenfor
- Mobilitetsbasemotor
- Højhastigheds hobbymotor
- Bæltdrevmotor
- Slot bilmotor
- Pulsdrevet
- Arm tilpasset motor
- Bipolar stepper med markør
Bio Motor
Biometal er et fantastisk stof, der har eksisteret i et par år, og det har en række anvendelser inden for robotteknologi. Vi kan se på illustrationen, at et stykke biometaltråd krymper med fem procent af dets længde, når der kun påføres et par volt over det. Efter mange års test har bio-wire vist sig at være stærk, pålidelig og bliver mere nyttig, når nye produkter dukker op. Dens noget langsommere svartid gør den ideel til robotarm- og håndapplikationer, hvor rykninger ville være problematiske. Et langt stykke ledning kan producere en betydelig bevægelse, når den strækkes i hele længden af en robotarm. Der er i øjeblikket robotarmsæt på det kommercielle marked, der bruger biometallet.
Relæer
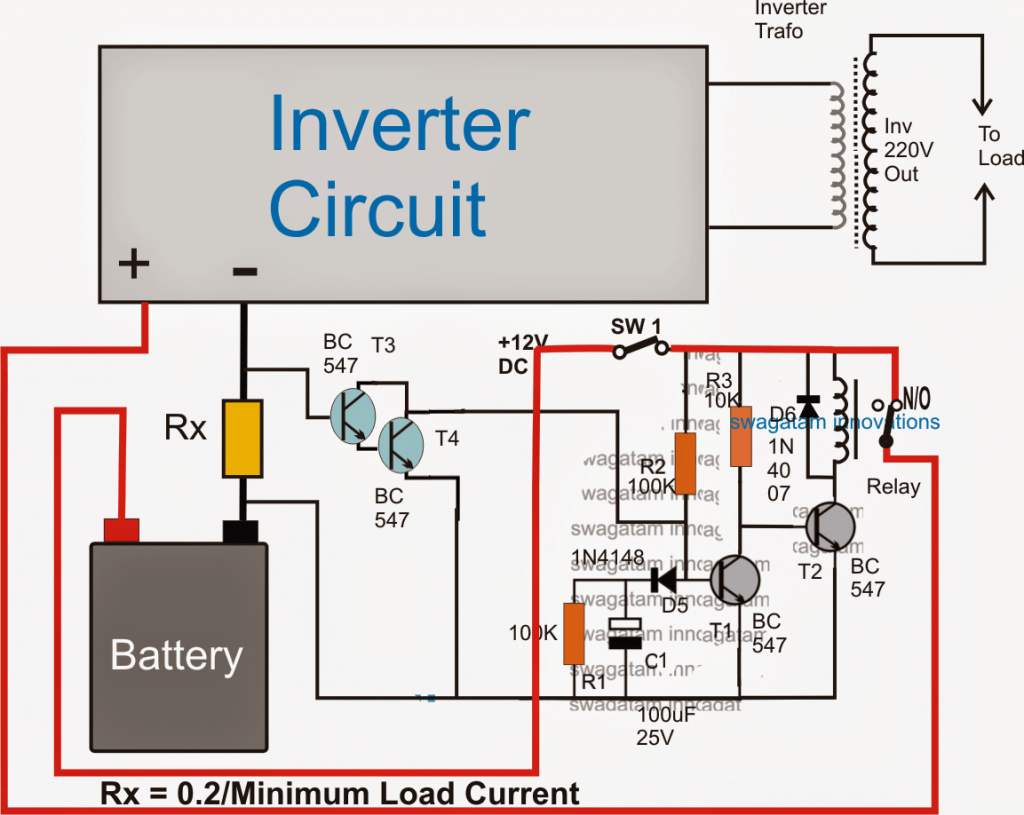
Relæet, inden for robotteknologi, bruges næsten altid til at isolere den effekt, der er beregnet til motorer, fra strømforsyningen til computerfunktion. Motorer stiller på grund af deres lave impedans høje strømkrav til strømforsyninger og skaber flere fejl, som computere ikke tåler. Det er derfor en god idé at bruge en separat højstrømskilde til kun motorer.
Solenoider
Solenoider bruges bedst som manipulatorstyringsenheder eller switchoperatorer. Deres bevægelse er hurtig og stærk, så en kilde bruges næsten altid i gribere til at blødgøre handlingen. Som du kan se på illustrationen, bruges kontroltråde til at lukke griberen. Disse styretråde kan også fungere som returfjedre. Graspers som denne findes mere i produktionslinjearbejde, hvor opgaven er meget målt og dækker snævre parametre.
Sekundære funktioner
De fleste motorfunktioner involverer mobilitet, arm, hoved eller anden synlig ekstern bevægelse, men nogle motorbevægelser er ikke så synlige. Store industrielle robotter bruger hydrauliske systemer, der bruger pumpemotorer til at producere et driftstryk af en hydraulisk væske. En anden vigtig sekundær funktion af motorerne er kontrolleret justering. For at forbedre nøjagtigheden er potentiometre, der er grænseflade med motorer, som regel multi-turn enheder.
Konklusion
Robotter kan være meget komplekse enheder, der kræver en lang række motordrevne bevægelser. Denne artikel er beregnet til at give et overblik over rækkevidden af enheder, du måske har at gøre med som robotbygger. Det ville være en god ide at starte med at undersøge leverandører af robotudstyr og tilgængelige forsyninger. Der er en enorm mængde produkt tilgængeligt nu, og Internettet gør det nemt at finde, lære om og bruge. Uanset hvad du har brug for, skal en smule opfindsomhed og den beslutsomhed, som alle robotbyggere synes at have, tjene dig godt.
Samadan Wandre
Marketingdirektør
“Motorer brugt i robotik”
- Mobilitetsbasemotor

- Højhastigheds hobbymotor
- Bæltdrevmotor
- Slot bilmotor
- Pulsdrevet
- Arm tilpasset motor
- Bipolar stepper med markør

Større motorer er bedst egnet til mobilitetsbaser, der giver robotter mulighed for at manøvrere terrænet. Nogle af disse motorer leveres med gearkasser til at producere den langsommere hastighed og det nødvendige moment til mobilitet. Sænkning af spændingen til en motor kan også sænke den til en mere ønskelig hastighed. Kun eksperimenter kan afgøre, om din motor fungerer med en lavere spænding. Hvis det gør det, har du sparet dig selv en masse problemer, hvis ikke, er der andre måder at bremse motorerne på. Nogle højhastighedsmotorer kan bruges, hvis der bruges snekkegear eller skruegear.
Et eksempel på skruegearet kan ses i illustrationen af robotarmen. Når motoren drejer med uret, trækkes boltenheden mod motoren, og armen trækker sig sammen, og når den drejer mod uret, strækker armen sig ud. Selvom motorakslen drejer hurtigt, er armens handling betydeligt langsommere på grund af skruereduktionen. I denne følgende motorkredsillustration ser vi en DC-motor styret af en effekttransistor. En relæafbryder (Double Pole Double Throw) bestemmer retningen. Transistor Q1 skal være en effekttransistor til at tage motorens tunge belastning.
Pulserende motorer
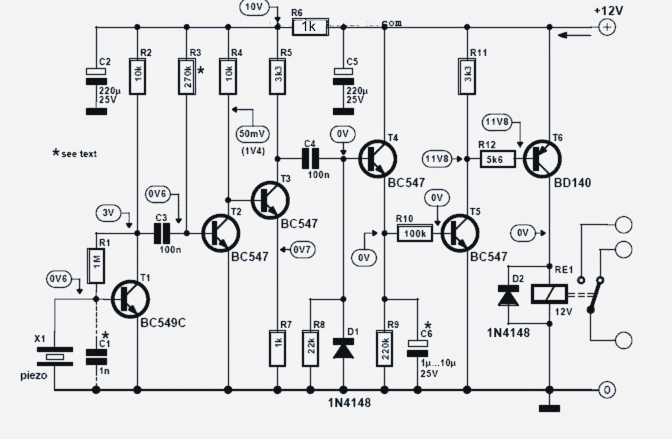
Nogle motorer får en hastighedsreduktion ved at køre fra et pulserende jævnstrømsignal. Dette signal er normalt omkring hundrede Hz. Motorens hastighed kan ændres ved at ændre pulsbredden, ikke ved at ændre pulsfrekvensen. Motorer som disse findes i overskydende elektronikbutikker og kan let identificeres ved hjælp af den pulsgenerator, der er tilsluttet den. Enhver jævnstrømsmotor kan dog drives af en impulskilde, og et skema over et sådant kredsløb er inkluderet.
Som du kan se blev en 555 timer valgt som drevoscillator, der producerer en frekvens på ca. 100 Hz. Modstand R1 og kondensator C stabiliserer og isolerer pulsgeneratoren fra de spidser, der produceres af motoren. Da denne enhed kan trække fra en strømforsyning på 6 til 12 volt, vil du muligvis ændre værdien af kondensator C4 og C6 for bedre resultater, afhængigt af hvilken spænding du bruger. Impulsudgangen tages fra pin tre på IC1 og føres til pin to i IC2, også en 555 timer.
Den anden timer varierer pulsens bredde ved at justere den spænding, der tilføres kondensator C6 gennem potentiometer R5 og modstand R6. Pulsens varighed er det, der bestemmer motorens hastighed, og pulsbredden kan justeres fra 10% til 100%.
Transistor Q1 modtager det pulsbreddemodulerede signal gennem modstanden R7. Da Q1 er en enhed med lav strøm, sender den signalet til Q2, en effekttransistor, der kan håndtere motorens strømbehov. Disse transistorer er ikke kritiske, og næsten enhver form for lavstrømstransistor fungerer. Relæet bestemmer, hvilken retning motoren tager.
Stepper Motors
Den mest komplekse af alle motorer er trinmotoren. Ligesom navnet heraf drejer motoren sig i gradvise trin og pulsstyres. Den nøjagtige drejningsgrad pr. Trin kan variere fra en producent eller model til en anden, men 20 grader er populær og producerer 18 trin for en komplet drejning. Der er to grundlæggende typer trinmotorer, bipolar og unipolær. Som du kan se i skemaet med trinmotor, er den bipolære simpelthen en tospolet motor.
Den unipolære type er to spoler med midterhaner. Hvis centerhanerne ignoreres, kan den unipolære motor fungere som en bipolar type. De to spoler i en trinmotor tilføres skifteimpulser skiftevis i polaritet fra spole til spole. Et kort over denne proces er tilvejebragt i arbejdsdiagrammet til grafisk at repræsentere motorhandling. I modsætning til konventionelle jævnstrømsmotorer falder momentet med hastigheden. En særlig type drivenhed er også påkrævet for at fremføre trinmotoren og skal leveres sammen med motoren. Det anbefales ikke, at du bygger en styreenhed, medmindre motoren leveres med et godt specifikationsark, der har komponentanbefalinger og fuldt skematisk.
Motoren kan kræve buffere for at isolere den fra drevsystemet, eller det kan kræve en separat strømforsyning. Uanset behovene kan de variere betydeligt fra motor til motor. Hobbybutikker er de mest pålidelige leverandører af trinmotorer, og selvom overskydende elektroniske butikker lejlighedsvis kan have dem, inkluderer de muligvis ikke den nødvendige specifikationsinformation
Delvis drejningsmotorer
Nogle robotfunktioner kræver kun en delvis drejning, såsom hoved- eller armbevægelser. Den nemmeste måde at opnå disse på er ved at stoppe og glide gear. En illustration af de mekaniske detaljer for denne type motor er angivet ovenfor. Mikrokontakter kan bruges som stopfølere til at slukke for strømmen og nulstille retningen til næste handling.
Det nederste hjul er forbundet med motoren, mens det øverste hjul er adskilt fra det nederste hjul med et cirkulært stykke filt. Når det nederste hjul drejer, drejer det øverste hjul med det, indtil stopbolten kommer i kontakt med mikrokontakten. Nogle designs indeholder ikke bestemmelser for at stoppe motoren, så enkle skruer med afstandsstykker fungerer som motorstop.
Bio-motor
Biometal er et fantastisk stof, der har eksisteret i et par år, og det har en række anvendelser inden for robotteknologi. Vi kan se på illustrationen, at et stykke biometaltråd krymper med fem procent af dets længde, når der kun påføres et par volt over det. Efter mange års test har bio-wire vist sig at være stærk, pålidelig og bliver mere nyttig, når nye produkter dukker op. Dens noget langsommere svartid gør den ideel til robotarm- og håndapplikationer, hvor rykkighed ville være problematisk. Et langt stykke tråd kan producere en markant bevægelse, når den strækkes i hele længden af en robotarm. Der er i øjeblikket robotarmsæt på det kommercielle marked, der bruger biometallet.
Bhaskar Singh
Marketingdirektør
 Industrielle robotter er enheder, der til en vis grad duplikerer menneskelig bevægelse sammen med reduktion af fare, hvilket giver mere styrke, nøjagtighed og kontinuitet. De har brug for en bred vifte af motordrevne bevægelser afhængigt af deres driftsformer, styring, anvendte værktøjer og arbejde, der skal udføres. En industriel robotmotor skal have potentialet til at håndtere en lang række opgaver end de normale motorer for at specialisere sig i en bestemt opgave.
Industrielle robotter er enheder, der til en vis grad duplikerer menneskelig bevægelse sammen med reduktion af fare, hvilket giver mere styrke, nøjagtighed og kontinuitet. De har brug for en bred vifte af motordrevne bevægelser afhængigt af deres driftsformer, styring, anvendte værktøjer og arbejde, der skal udføres. En industriel robotmotor skal have potentialet til at håndtere en lang række opgaver end de normale motorer for at specialisere sig i en bestemt opgave.
Elektriske motorer bruges mest i industriel robotik på grund af meget effektiv strømforsyning og relativt enkel design, hvilket gør dem til en mere populær mulighed med hensyn til pris-til-ydelses-vurdering i alle aspekter - installation, vedligeholdelse og service.
Afhængigt af det nødvendige arbejde bruges forskellige motorer til forskellige formål. F.eks. Bruges jævnstrømsmotorer til bevægelser i retning mod uret og mod uret, eksempler er i kraner og hejser, pulsede motorer bruges til at give pulsede bevægelser ved hjælp af jævnstrømsimpulsbredde, delvis drejede motorer bruges til at give hoved- og armlignende bevægelser og mest komplekse - stepmotorer bruges til at give trinvise sving i gradvise trin.
Desuden, afhængigt af arbejdstypen, anvendes motorer med forskellige klassifikationer og størrelser til forskellige formål. Der er flere typer motorer, der hver har forskellige anvendelser forskellige steder afhængigt af arbejde og robotdesign.
Mohan Krishna. L
Salgs- og supportchef
Robotter bruges til at udføre det job, der kan udføres af mennesker, og der er mange grunde til, at robotter er bedre end mennesker. 
Der er to hovedtyper af robot, de er: -
Mobil robot: Det bevæger sig på ben eller spor.
Stationær robot: Det har en fast base.
Stationære robotter kan normalt bruges til at samle genstande eller udføre et andet job, der involverer at nå frem til et objekt.
En robotarm har tre grundlæggende dele: -
- Skulderled
- Håndled
- Fast bund
Brug for en robot til
- Evne til at arbejde hurtigt og farligt miljø.
- Evne til at gentage opgaver igen og igen.
- Evne til at arbejde præcist.
- Evne til at udføre forskellige opgaver.
- Effektivitet.
Motor er en enhed, der omdanner elektrisk energi til mekanisk energi, dvs. elektromekanisk enhed. Der er to typer motorer, såsom vekselstrømsmotor og jævnstrømsmotor
Motoren, der anvendes i industriel robotteknologi, er Servomotor. Servomotor er en simpel elektrisk motor, der styres ved hjælp af servomekanisme. Hvis den styrede motor drives af AC, kaldes den AC Servomotor ellers DC Servomotor. De fleste servomotorer kan rotere omkring 90 til 180 grader. Selv nogle roterer igennem 360 grader eller mere. Nogle af anvendelserne af servomotor i robotteknologi er
- Servomotorapplikation i robot, dvs. en simpel pick and place-robot, den bruges til at vælge et objekt fra en position og placere objektet i en anden position.
- Servomotor i transportbånd bruges
- inden for industriel Fremstilling og samling af enheder til at føre en genstand fra en samlingsstation til en anden. For eksempel: - En flaskepåfyldningsproces.
- Servomotor i robotkøretøj her Servomotor brugt i hjulene. Siden servomotoren med kontinuerlig rotation anvendes.
Dinesh.P
Marketingdirektør
 Robotter introduceres for at reducere menneskets hårde værker og hjælpe med at skabe lykke for mennesker for fremtidig udvikling. Udtrykket robotter betyder den maskine, der efterligner de forskellige menneskelige egenskaber. Robotteknologi inkluderer viden om mekanik, elektronik, elektroteknik og datalogi. Motorer, der anvendes i robotter, er DC-motorer, stepmotorer og servomotorer
Robotter introduceres for at reducere menneskets hårde værker og hjælpe med at skabe lykke for mennesker for fremtidig udvikling. Udtrykket robotter betyder den maskine, der efterligner de forskellige menneskelige egenskaber. Robotteknologi inkluderer viden om mekanik, elektronik, elektroteknik og datalogi. Motorer, der anvendes i robotter, er DC-motorer, stepmotorer og servomotorer
Hvor,
- DC-motorer bruges til kontinuerlig rotation
- Stepper Motors bruges til rotation i få grader
- Servomotorer bruges til positionering, den kan bruges i biler og fly
Ganesh .J
Marketingdirektør 
Robotter bruges til at udføre det job, der kan udføres af mennesker, og reducerer også den menneskelige indsats og tid og forbedrer kvaliteten. Motorer, der anvendes i industriel robotik, er
- Vekselstrømsmotorer
- Jævnstrømsmotorer
- Servomotorer
- Stepper Motors.