EN servo motor eller servo er en type elektrisk motor, der bruges til at rotere maskindelene med høj præcision. Denne motor inkluderer et styrekredsløb, der giver feedback på den aktuelle placering af motorens aksel, så denne feedback tillader simpelthen disse motorer at rotere med høj præcision. En servomotor er gavnlig til at rotere et objekt i en vis afstand eller vinkel. Denne motor er klassificeret i to typer AC servomotor og DC servomotor. Hvis en servomotor bruger DC-strøm til at arbejde, kaldes motoren en DC-servomotor, mens hvis den arbejder med AC-strøm, er den kendt som en AC-servomotor. Denne vejledning giver kort information om DC servomotor – arbejde med applikationer.
Hvad er DC-servomotor?
En servomotor, der bruger DC elektrisk input til at producere mekanisk udgang som position, hastighed eller acceleration kaldes en DC servomotor Generelt bruges disse typer motorer som drivmotorer inden for numerisk styrede maskiner, computere og mange flere, uanset hvor der foretages start og stop. præcist & meget hurtigt.

DC servomotor konstruktion og arbejde
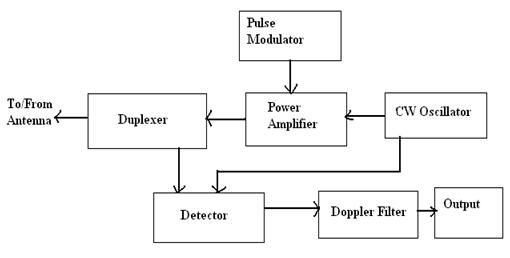
DC-servomotoren er konstrueret med forskellige komponenter, som er angivet i det følgende blokdiagram. I dette diagram er hver komponent og dens funktion diskuteret nedenfor.

Motoren, der anvendes i dette, er en typisk jævnstrømsmotor inklusive dens feltvikling, som aktiveres separat. Så afhængigt af excitationsnaturen kan yderligere kategoriseres som armaturstyrede og feltstyrede servomotorer.
Belastningen, der bruges i dette, er en simpel ventilator eller industriel belastning, som blot er forbundet til motorens mekaniske aksel.
Gearkassen i denne konstruktion fungerer som en mekanisk transducer for at ændre motorens output som acceleration, position eller hastighed afhængigt af applikationen.

En positionssensors hovedfunktion er at få feedbacksignalet svarende til lastens aktuelle position. Generelt er dette et potentiometer, der bruges til at give en spænding, der er proportional med motorakslens absolutte vinkel gennem gearmekanismen.
Komparatorfunktionen er at sammenligne o/p af en positionssensor & et referencepunkt for at producere fejlsignalet og give det til forstærkeren. Hvis DC-motoren arbejder med præcis styring, er der ingen fejl. Positionssensoren, gearkassen og komparatoren vil gøre systemet til en lukket sløjfe.
Forstærkerfunktionen er at forstærke fejlen fra komparatoren og føre den til DC-motoren. Så den fungerer som en proportional controller, hvor forstærkningen er styrket for nul steady-state fejl.
Det kontrollerede signal giver input til PWM (pulsbreddemodulator) afhængigt af feedbacksignalet, så det modulerer motorens input for præcis kontrol ellers nul steady-state fejl. Yderligere bruger denne pulsbreddemodulator en referencebølgeform & komparator til at producere pulser.
Ved at lave det lukkede sløjfesystem opnås acceleration, hastighed eller nøjagtig position. Som navnet antyder, er servomotoren en styret motor, der giver det foretrukne output på grund af feedback & controller-effekten. Fejlsignalet forstærkes simpelthen og bruges til at drive servomotoren. Afhængigt af styresignal- og pulsbreddemodulator-producerende natur, har disse motorer overlegne styrede metoder med FPGA-chips eller digitale signalprocessorer.
DC-servomotorens funktion er; hver gang indgangssignalet påføres jævnstrømsmotoren, roterer det akslen og gearene. Så dybest set føres rotationen af gearets output tilbage til positionssensoren (potentiometeret), hvis knapper drejer og ændrer deres modstand. Når modstanden ændres, ændres en spænding, som er et fejlsignal, der føres ind i controlleren, og som følge heraf genereres PWM.
For at vide mere om typerne af DC-servomotorer, se venligst dette link: Forskellige typer servomotorer .
Overførselsfunktion af DC-servomotor
Overførselsfunktionen kan defineres som forholdet mellem Laplace-transformationen (LT) af o/p-variablen og LT ( Laplace transformation ) af i/p-variablen. Generelt ændrer DC-motoren energien fra elektrisk til mekanisk. Den tilførte elektriske energi ved ankerterminalerne ændres til styret mekanisk energi.
Den ankerstyrede DC-servomotoroverførselsfunktion er vist nedenfor.

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
Den feltstyrede DC-servomotoroverførselsfunktion er vist nedenfor.

θ(s)/Vf (s) = Kf / (sLf + Rf) * (s2J + Bs)
Den armaturstyrede jævnstrømsservomotor giver overlegen ydeevne på grund af det lukkede sløjfesystem sammenlignet med feltstyret jævnstrømsservomotor, som er det åbne sløjfesystem. Derudover er reaktionshastigheden langsom inden for feltkontrolsystemet. I armaturstyret tilfælde er ankerets induktans ubetydelig, mens det i feltkontroltilfældet ikke er det samme. Men i Infield-styring er forbedret dæmpning ikke opnåelig, mens det i ankerstyring kan opnås.
specifikationer
DC-servomotoren giver ydeevnespecifikationer, som inkluderer følgende. Disse specifikationer bør matches baseret på applikationens belastningsbehov for at dimensionere en motor korrekt.
- Akselhastighed definerer simpelthen den hastighed, hvormed akslen drejer, udtrykt inden for RPM (rotationer pr. minut).
- Sædvanligvis er den hastighed, som producenten tilbyder, den ubelastede hastighed på o/p-akslen eller den hastighed, hvor motorens udgangsmoment er nul.
- Terminalspænding er motorens designspænding, som bestemmer motorhastigheden. Denne hastighed styres ganske enkelt ved at øge eller mindske den tilførte spænding til motoren.
- Den rotationskraft-lignende drejningsmoment genereres af akslen på DC-servomotoren. Så det nødvendige drejningsmoment for denne motor bestemmes ganske enkelt af hastighed-drejningsmoment-egenskaberne for de forskellige belastninger, der opleves inden for målapplikationen. Disse drejningsmomenter er to typer startmoment og kontinuerligt drejningsmoment.
- Startmomentet er det nødvendige drejningsmoment ved start af servomotoren. Dette drejningsmoment er normalt højere sammenlignet med kontinuerligt drejningsmoment.
- Det kontinuerlige drejningsmoment er det udgangsmoment, der er motorens kapacitet under konstante driftsforhold.
- Disse motorer skal have tilstrækkelig hastigheds- og drejningsmomentkapacitet til anvendelsen, inklusive en 20 til 30 % margin mellem belastningsbehovene samt motorklassificeringer for at sikre pålidelighed. Når disse marginer overstiger for meget, vil effektiviteten af omkostningerne blive reduceret specifikationer for 12V DC Coreless DC Servo Motor fra Faulhaber er:
- Gearkasseforholdet er 64:l Planetarisk tretrins gearkasse.
- Belastningsstrømmen er 1400 mA strøm.
- Effekten er 17W.
- Hastigheden er 120 RPM.
- Ingen belastningsstrøm er 75mA.
- Encodertypen er optisk.
- Encoderens opløsning er 768CPR for O/P-akslen.
- Diameteren er 30 mm.
- Længden er 42 mm.
- Den samlede længde er 85 mm.
- Skaftets diameter er 6 mm.
- Skaftets længde er 35 mm.
- Båsens drejningsmoment er 52 kgcm.
Egenskaber
Det egenskaber for en DC servomotor omfatte følgende.
- DC-servomotordesignet ligner en permanent magnet eller separat exciteret DC-motor.
- Denne motors hastighedskontrol udføres ved at styre armaturspændingen.
- Servomotoren er designet med høj armaturmodstand.
- Det giver hurtig drejningsmomentrespons.
- En trinændring inden for ankerspændingen genererer en hurtig ændring i motorens hastighed.
AC servomotor vs DC servomotor
Forskellen mellem en DC servomotor og en AC servomotor inkluderer følgende.
|
AC servomotor |
DC servomotor |
| En slags servomotor, der bruger AC elektrisk input til at generere mekanisk output kaldes en AC servomotor. | En slags servomotor, der bruger DC elektrisk input til at generere mekanisk output kaldes en DC servomotor. |
| AC servomotor leverer lav udgangseffekt. | DC servomotor leverer høj udgangseffekt. |
| Disse motorer er justerbare til højhastighedsdrift. | Disse motorer er justerbare til driftsforhold med lav hastighed. |
| Disse typer motorer udvikler højt drejningsmoment. | Disse typer motorer udvikler lavt drejningsmoment. |
| Driften af denne motor er stabil, jævn og mindre støjbaseret. | Driften af denne motor er mindre stabil og støjende. |
| Disse motorer har mindre effektivitet. | Disse motorer har høj effektivitet. |
| Disse motorer har færre stabilitetsproblemer. | Disse motorer har flere stabilitetsproblemer. |
| I disse motorer er der intet elektronisk støjproblem. | I disse motorer er der et elektronisk støjproblem på grund af tilstedeværelsen af børster. |
| Vedligeholdelsen af disse motorer er mindre. | Vedligeholdelsen af disse motorer er høj på grund af tilstedeværelsen af børster og kommutator. |
| Disse er lette og i små størrelser. | Disse er tunge og i stor størrelse. |
| Disse motorer er velegnede til laveffektbaserede applikationer. | Disse motorer er velegnede til højeffektbaserede applikationer. |
DC Servo Motor Interface med Arduino
For at styre en DC-servomotor i en nøjagtig og påkrævet vinkel kan et Arduino-kort/en hvilken som helst anden mikrocontroller bruges. Dette kort har analog o/p, som genererer et PWM-signal for at dreje servomotoren i en præcis vinkel. Du kan også flytte servomotorens vinkelposition med et potentiometer eller trykknapper ved hjælp af en Arduino.
Servomotoren kan også styres med en IR-fjernbetjening, som er let tilgængelig. Denne fjernbetjening er nyttig til at flytte DC-servomotoren til en bestemt vinkel eller øge eller formindske vinklen på motoren lineært med en IR-fjernbetjening.
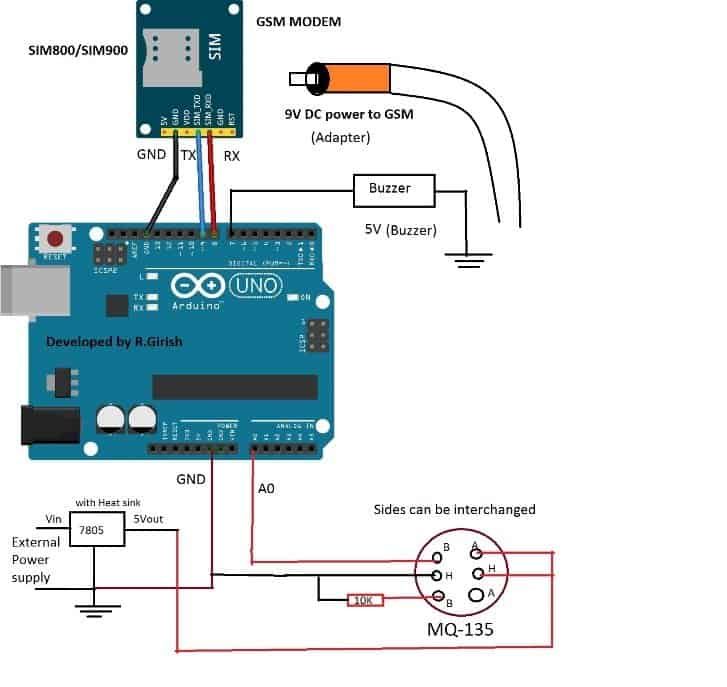
Her vil vi diskutere, hvordan man flytter servomotoren ved hjælp af en IR-fjernbetjening ved hjælp af Arduino i en bestemt vinkel og også øge eller formindske vinklen på servomotoren med fjernbetjeningen med uret og mod uret. Grænsefladediagrammet for DC-servomotoren med Arduino og IR-fjernbetjening er vist nedenfor. Forbindelserne af denne grænseflade følger som;

Denne grænseflade bruger hovedsageligt tre væsentlige komponenter som DC-servomotor, Arduino-kort og TSOP1738 IR-sensor. Denne sensor har tre terminaler som Vcc, GND og output. Vcc-terminalen på denne sensor er forbundet til 5V på Arduino Uno-kortet, GND-terminalen på denne sensor er forbundet til GND-terminalen på Arduino-kortet, og udgangsterminalen er forbundet til pin 12 (digital indgang) på Arduino-kortet.
Digital udgangsben 5 er simpelthen forbundet til signalindgangsbenet på servomotoren for at drive motoren
DC-servomotoren +ve-benet gives til den eksterne 5V-forsyning, og GND-benet på servomotoren gives til GND-benet på Arduino.
Arbejder
IR-fjernbetjeningen bruges til at udføre to handlinger 30 grader, 60 grader og 90 grader og også til at øge/mindske vinklen på motoren fra 0 til 180 grader.
Fjernbetjeningen indeholder mange knapper som cifferknapper (0-9), knapper til vinkelkontrol, piletastknapper, op/ned-knapper osv. Når der trykkes på en cifferknap fra 1 – 5, vil jævnstrømsservomotoren flytte sig dertil nøjagtig vinkel, og når der trykkes på vinkel op/ned-knappen, kan vinklen på motoren indstilles nøjagtigt til ±5 grader.
Når knapperne er besluttet, skal koderne for disse knapper afkodes. Når der trykkes på en vilkårlig knap fra fjernbetjeningen, sender den én kode til at udføre den nødvendige handling. For at afkode disse fjernkoder bruges IR-fjernbiblioteket fra internettet.
Upload følgende program til Arduino og tilslut IR-sensoren. Placer nu fjernbetjeningen mod IR-sensoren og tryk på knappen. Åbn derefter den serielle skærm og overvåg koden for den trykte knap i form af tal.
Arduino kode
#include
#include
Service service1;
int IRpin = 12; // pin til IR-sensoren
int motor_angle=0;
IRrecv irrecv(IRpin);
decode_results resultater;
ugyldig opsætning()
{
Serial.begin(9600); // initialiser seriel kommunikation
Serial.println(“IR fjernstyret servomotor”); // vis besked
irrecv.enableIRIn(); // Start modtageren
servo1.attach(5); // erklære servomotor pin
servo1.write(motorvinkel); // flyt motoren til 0 grader
Serial.println(“Servomotorvinkel 0 grader”);
forsinkelse (2000);
}
void loop()
{
while(!(irrecv.decode(&resultater))); // vent, indtil der ikke trykkes på nogen knap
if (irrecv.decode(&results)) // når der trykkes på knappen og koden modtages
{
if(results.value==2210) // tjek om der er trykket på ciffer 1-knappen
{
Serial.println(“servomotorvinkel 30 grader”);
motorvinkel = 30;
servo1.write(motorvinkel); // flyt motoren til 30 grader
}
else if(results.value==6308) // hvis der trykkes på ciffer 2-knappen
{
Serial.println(“servomotorvinkel 60 grader”);
motorvinkel = 60;
servo1.write(motorvinkel); // flyt motoren til 60 grader
}
else if(results.value==2215) // like wise for alle cifferknapper
{
Serial.println(“servomotorvinkel 90 grader”);
motorvinkel = 90;
servo1.write(motorvinkel);
}
else if(results.value==6312)
{
Serial.println(“servomotorvinkel 120 grader”);
motorvinkel = 120;
servo1.write(motorvinkel);
}
else if(results.value==2219)
{
Serial.println(“servomotorvinkel 150 grader”);
motorvinkel = 150;
servo1.write(motorvinkel);
}
else if(results.value==6338) // hvis der trykkes på lydstyrke OP-knappen
{
hvis(motorvinkel<150) motorvinkel+=5; // øge motorvinkel
Serial.print(“Motorvinkel er “);
Serial.println(motorvinkel);
servo1.write(motorvinkel); // og flyt motoren til den vinkel
}
else if(results.value==6292) // hvis der trykkes på lydstyrke ned-knappen
{
hvis(motorvinkel>0) motorvinkel-=5; // mindske motorvinkel
Serial.print(“Motorvinkel er “);
Serial.println(motorvinkel);
servo1.write(motorvinkel); // og flyt motoren til den vinkel
}
forsinkelse(200); // vent i 0,2 sek
irrecv.resume(); // igen være klar til at modtage næste kode
}
}
Forsyningen til DC-servomotoren gives fra den eksterne 5V & forsyningen til IR-sensoren & Arduino-kortet er givet fra USB. Når først strøm er givet til servomotoren, bevæger den sig til 0 grader. Derefter vil meddelelsen blive vist som 'servomotorvinkel er 0 grader' på den serielle monitor.
Nu på fjernbetjeningen, når der trykkes på knap 1, vil DC-servomotoren bevæge sig 30 grader. På samme måde, når der trykkes på knapper som 2, 3, 4 eller 5, vil motoren bevæge sig med de ønskede vinkler som 60 grader, 90 grader, 120 grader eller 150 grader. Nu vil den serielle monitor vise servomotorens vinkelposition som 'servomotorvinkel xx grader'
Når først volumen op-knappen er trykket, vil vinklen på motoren blive øget med 5 grader, hvilket betyder, at hvis den er 60 grader, så vil den bevæge sig til 65 grader. Så den nye vinkels position vil blive vist på den serielle monitor.
Ligeledes, når der trykkes på vinkel ned-knappen, vil motorens vinkel blive reduceret med 5 grader, hvilket betyder, at hvis vinklen er 90 grader, så vil den bevæge sig til 85 grader. Signalet fra IR-fjernbetjeningen registreres af IR-sensoren. Klik for at vide, hvordan den sanser, og hvordan IR-sensoren fungerer her
Så den nye vinkels position vil blive vist på den serielle monitor. Derfor kan vi nemt styre vinklen på DC servomotoren med Arduino & IR fjernbetjening.
For at vide, hvordan man forbinder DC-motor med 8051 mikrocontroller klik her
Fordele ved DC-servomotor
Det fordelene ved DC servomotorer omfatte følgende.
- DC servomotordrift er stabil.
- Disse motorer har meget højere udgangseffekt end motorens størrelse og vægt.
- Når disse motorer kører ved høje hastigheder, genererer de ingen støj.
- Denne motordrift er vibrations- og resonansfri.
- Disse typer motorer har et højt drejningsmoment til inerti-forhold, og de kan opfange belastninger meget hurtigt.
- De har høj effektivitet.
- De giver hurtige svar.
- Disse er bærbare og lette.
- Betjening af fire kvadranter er mulig.
- Ved høje hastigheder er disse lydsvage.
Det ulemper ved DC servomotorer omfatte følgende.
- DC-servomotorens kølemekanisme er ineffektiv. Så denne motor bliver hurtigt forurenet, når den først er ventileret.
- Denne motor genererer maksimal udgangseffekt ved en højere momenthastighed og har brug for regelmæssig gearing.
- Disse motorer kan blive beskadiget ved overbelastning.
- De har et komplekst design og har brug for en encoder.
- Disse motorer har brug for tuning for at stabilisere feedback-sløjfen.
- Det kræver vedligeholdelse.
DC-servomotorapplikationer
Det anvendelser af DC servomotorer omfatte følgende.
- DC servomotorer bruges i værktøjsmaskiner til skæring og formning af metal.
- Disse bruges til antennepositionering, print, emballering, træbearbejdning, tekstiler, fremstilling af sejlgarn eller reb, CMM (Coordinate Measuring Machines), håndtering af materialer, polering af gulvet, åbning af døre, X-Y bord, medicinsk udstyr og waferspinding.
- Disse motorer bruges i flykontrolsystemer, hvor plads- og vægtbegrænsninger kræver, at motorer leverer høj effekt for hver enhedsvolumen.
- Disse er anvendelige, hvor højt startmoment er nødvendigt, såsom blæserdrev og blæsere.
- Disse bruges også hovedsageligt til robotter, programmeringsenheder, elektromekaniske aktuatorer, værktøjsmaskiner, procescontrollere osv.
Dette er således en oversigt over dc servomotor – virker med ansøgninger. Disse servomotorer bruges i forskellige industrier for at give løsningen til mange mekaniske bevægelser. Egenskaberne ved disse motorer vil gøre dem meget effektive og kraftfulde. Her er et spørgsmål til dig, hvad er AC Servo Motor?