En selvdrevet generator er en evig elektrisk enhed designet til uendeligt at køre og producere et kontinuerligt elektrisk output, som normalt er større i størrelse end den inputforsyning, gennem hvilken den kører.
Hvem vil ikke gerne se, at en selvdrevet motorgenerator kører derhjemme og forsyner de ønskede apparater direkte, helt gratis. Vi diskuterer detaljerne i nogle få sådanne kredsløb i denne artikel.
En fri energientusiast fra Sydafrika, der ikke ønsker at afsløre sit navn, har generøst delt detaljerne i sin solid state-selvdrevne generator til alle de interesserede forskere om fri energi.
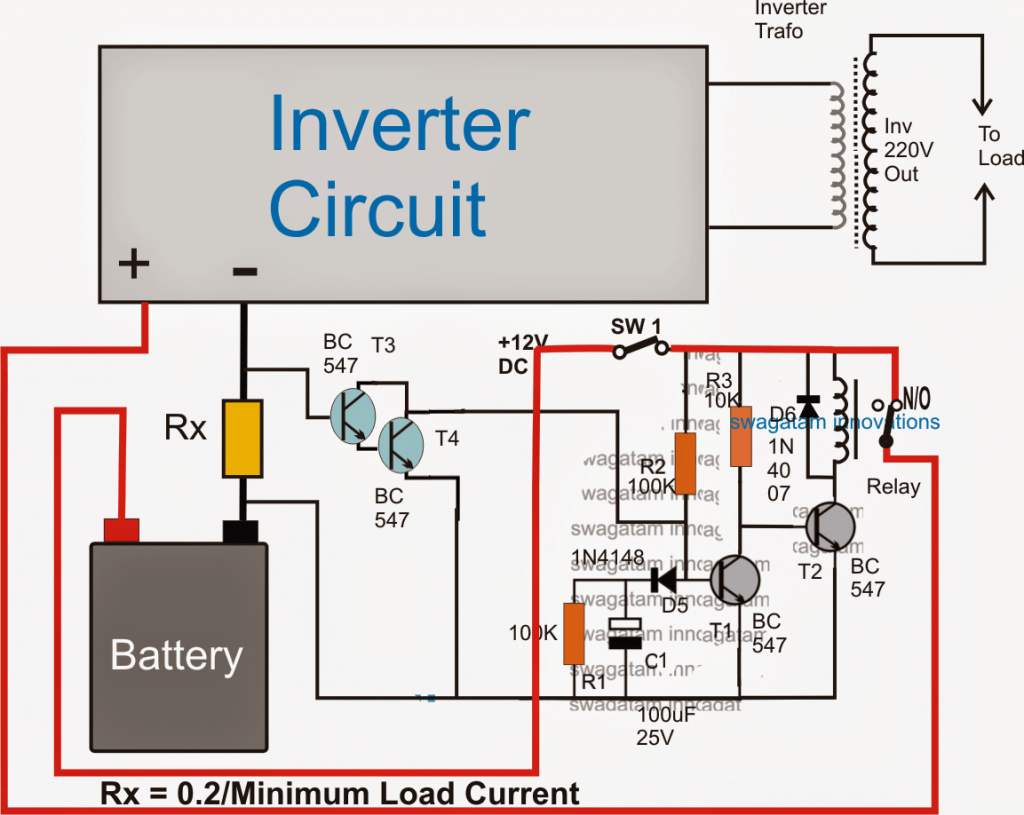
Når systemet bruges med en inverter kredsløb , output fra generatoren er omkring 40 watt.
Systemet kan implementeres gennem et par forskellige konfigurationer.
Den første version, der diskuteres her, er i stand til at oplade tre 12 batterier sammen og opretholde generatoren til en permanent evig drift (indtil selvfølgelig batterierne mister deres opladnings- / afladningsstyrke)

Den foreslåede selvdrevne generator er designet til at arbejde dag og nat med kontinuerlig elektrisk effekt, ligesom vores solpanel enheder.
Den oprindelige enhed blev konstrueret ved hjælp af 4 spoler som stator og en central rotor med 5 magneter indlejret omkring sin omkreds som vist nedenfor:

Den viste røde pil fortæller os om det justerbare hul mellem rotoren og spolerne, som kan ændres ved at løsne møtrikken og derefter flytte spolesamlingen tæt på eller væk fra statormagneterne for de ønskede optimerede output. Afstanden kan være hvor som helst mellem 1 mm og 10 mm.
Rotorsamlingen og mekanismen skal være yderst nøjagtig med sin justering og lette rotation og skal derfor bygges ved hjælp af præcisionsmaskiner såsom en drejebænkemaskine.
Materialet, der anvendes til dette, kan være klart akryl, og samlingen skal indeholde 5 sæt med 9 magneter, der er fastgjort inde i cylindrisk rørlignende hulrum som vist i figuren.
Den øverste åbning af disse 5 cylindriske tromler er sikret med plastringe, der er ekstraheret fra de samme cylindriske rør for at sikre, at magneterne sidder tæt fast i deres respektive positioner inde i cylindriske hulrum.

Meget kort var de 4 spoler blevet forbedret til 5, hvor den nyligt tilføjede spole havde tre uafhængige viklinger. Designene forstås gradvist, når vi løber gennem de forskellige kredsløbsdiagrammer og forklarer, hvordan generatoren fungerer. Det første grundlæggende kredsløbsdiagram kan ses nedenfor

Batteriet betegnet som “A” aktiverer kredsløbet. En rotor 'C', der består af 5 magneter, flyttes manuelt, så en af magneterne bevæger sig tæt på spolerne.
Spolesættet “B” inkluderer 3 uafhængige viklinger over en enkelt central kerne, og magneten, der går forbi disse tre spoler, genererer en lille strøm inde i dem.
Strømmen i spole nummer '1' løber gennem modstanden 'R' og ind i bunden af transistoren og tvinger den til at tænde. Den energi, der bevæger sig gennem transistorspolen '2', gør det muligt at blive til en magnet, der skubber rotorskiven 'C' på sin vej, hvilket initierer en roterende bevægelse på rotoren.
Denne rotation fremkalder samtidig en strømvikling “3”, som udbedres gennem de blå dioder og overføres tilbage til opladningsbatteri “A”, der supplerer næsten al den strøm, der trækkes fra dette batteri.
Så snart magneten inden i rotoren “C” bevæger sig væk fra spolerne, slukkes transistoren og genopretter dens kollektorspænding på kort tid tæt på +12 Volt forsyningsledningen.
Dette tømmer spolen “2” af strømmen. På grund af den måde, hvorpå spolerne er placeret, trækker det kollektorspændingen op til omkring 200 volt og derover.
Dette sker dog ikke, fordi udgangen er forbundet til serie fem batterier, der taber stigningsspændingen i henhold til deres samlede vurdering.
Batterierne har en seriespænding på ca. 60 volt (hvilket forklarer, hvorfor en stærk, hurtigskiftende MJE13009-transistor er blevet inkorporeret.
Når kollektorspændingen går efter spændingen i seriebatteribanken, begynder den røde diode at tænde og frigiver den lagrede elektricitet i spolen til batteribanken. Den aktuelle puls bevæger sig gennem alle 5 batterier og oplader hver eneste af dem. Afslappet set udgør dette det selvdrevne generator design.
I prototypen var den belastning, der blev brugt til langvarig, utrættelig test, en 12 volt 150-watts inverter, der belyste en 40-watts lyspære:

Det enkle design, der er vist ovenfor, blev yderligere forbedret ved at inkludere et par flere pick-up-spoler:

Spoler “B”, “D” og “E” aktiveres alle samtidigt af 3 individuelle magneter. Den elektriske kraft, der genereres i alle de tre spoler, afleveres til de 4 blå dioder for at fremstille en jævnstrøm, der anvendes til at oplade batteriet “A”, som driver kredsløbet.
Den supplerende indgang til drevbatteriet som følge af inkluderingen af 2 ekstra drevspoler til statoren gør det muligt for maskinen at køre solidt i form af en selvdrevet maskine, der opretholder batteriets 'A'-spænding uendeligt.
Den eneste bevægelige del af dette system er rotoren, der er 110 mm i diameter og er en 25 mm tyk akrylskive installeret på en kuglelejemekanisme, bjærget fra din kasserede harddisk. Opsætningen ser sådan ud:

På billederne ser disken ud til at være hul, men i virkeligheden er den solid, krystalklart plastmateriale. Huller er boret på skiven er på tværs af fem lige så spredte steder i hele omkredsen, hvilket betyder med 72 graders adskillelse.
De 5 primære åbninger, der er boret på skiven, er til at holde magneterne, der er i grupper på ni cirkulære ferritmagneter. Hver af disse har en diameter på 20 mm og en højde på 3 mm, hvilket skaber magneter med en samlet højde på 27 mm og en diameter på 20 mm. Disse stabler med magneter er placeret på en sådan måde, at deres nordpoler rager udad.
Efter at magneterne er monteret, placeres rotoren inde i en plastrørstrimmel for at sikre magneterne tæt på plads, mens skiven hurtigt drejer. Plastrøret er fastspændt med rotoren ved hjælp af fem monteringsbolte med forsænket hoveder.
Spolespolerne er 80 mm lange med 72 mm endediameter. Den midterste spindel på hver spole er konstrueret af et 20 mm langt plastrør med en ydre og en indvendig diameter på 16 mm. giver en vægdensitet på 2 mm.
Når spiralviklingen er afsluttet, bliver denne indvendige diameter fuld med et antal svejsestænger med deres svejsebelægning taget ud. Disse er efterfølgende indkapslet i polyesterharpiks, men en solid bar af blødt jern kan også blive et glimrende alternativ:


De 3 ledningstråde, der udgør spoler '1', '2' og '3', er med en diameter på 0,7 mm og vikles med hinanden, inden den vikles på spolen 'B'. Denne metode til en bifilær vikling skaber en meget tungere komposit wire bundt, som effektivt kan være simpel spole over en spole. Opvikleren vist ovenfor fungerer med en borepatron til at holde spolekernen for at muliggøre viklingen, alligevel kan enhver form for grundlæggende opvikler også bruges.
Designeren udførte ledningsvridning ved at udvide de 3 tråde af ledning, der hver stammer fra en uafhængig 500 gram bundrulle.
De tre tråde holdes tæt i hver ende, hvor ledningerne presser hinanden i hver ende og har tre meters afstand mellem klemmerne. Derefter er ledningerne fastgjort i midten, og 80 omdrejninger tilskrives mellemsektionen. Dette tillader 80 omdrejninger for hver enkelt af de to 1,5 meter spændinger placeret mellem klemmerne.
Det snoede eller det indpakkede trådsæt er krøllet på en midlertidig rulle for at holde det pænt, fordi denne vridning skal duplikeres 46 gange mere, da alt indholdet af trådrullerne er påkrævet for denne ene sammensatte spole:

De næste 3 meter af de tre ledninger fastspændes derefter og 80 omdrejninger vikles til midterpositionen, men ved denne lejlighed placeres drejningerne i den modsatte retning. Selv nu er nøjagtigt de samme 80 drejninger implementeret, men hvis den tidligere vikling havde været 'med uret', vendes denne vikling 'mod uret'.
Denne særlige ændring i spoleretningerne tilvejebringer et komplet område af snoede ledninger, hvor vridningsretningen bliver modsat hver 1,5 meter over hele længden. Sådan indstilles den kommercielt fremstillede Litz-ledning.
Dette specifikke flotte snoede ledningssæt anvendes nu til vikling af spolerne. Der bores et hul i en spoleflange, nøjagtigt nær midterrøret og kernen, og ledningens start indsættes igennem det. Tråden bøjes derefter kraftigt 90 grader og påføres rundt om spoleakslen for at begynde viklingen af spolen.
Opviklingen af trådbundtet udføres med stor forsigtighed ved siden af hinanden på tværs af hele spoleakslen, og du vil se 51 antal viklinger omkring hvert lag, og det følgende lag vikles lige over toppen af dette allerførste lag og går tilbage igen mod starten. Sørg for, at drejningerne i dette andet lag hviler nøjagtigt over toppen af viklingen under dem.
Dette kan være ukompliceret, fordi trådpakken er tyk nok til, at placeringen er ganske enkel. Hvis du vil, kan du prøve at indpakke et tykt hvidt papir omkring det første lag for at gøre det andet lag tydeligt, når det vendes. Du har brug for 18 af sådanne lag for at afslutte spolen, der i sidste ende vil veje 1,5 kg, og den færdige samling ser muligvis ud som vist nedenfor:

Denne færdige spole består på dette tidspunkt af 3 uafhængige spoler tæt indpakket til hinanden, og denne opsætning er beregnet til at skabe en fantastisk magnetisk induktion over de to andre spoler, hver gang en af spolerne får strøm med en forsyningsspænding.
Denne vikling inkluderer i øjeblikket spoler 1,2 og 3 i kredsløbsdiagrammet. Du behøver ikke at fortsætte med at bekymre dig om at mærke enderne af hver trådtråd, da du let kan identificere dem ved hjælp af et almindeligt Ohmmeter ved at kontrollere kontinuiteten på tværs af de specifikke trådender.
Spole 1 kan bruges som udløserspolen, der tænder transistoren TIL i de rigtige perioder. Spole 2 kan være drivspolen, der får energi fra transistoren, og spole 3 kan være den første udgangsspole:

Spoler 4 og 5 er ligetil fjederlignende spoler, der er forbundet parallelt med drivspolen 2. De hjælper med at øge drevet og er derfor vigtige. Spole 4 har en jævnstrømsmodstand på 19 ohm, og spol 5-modstand kan være omkring 13 ohm.
Imidlertid er der i øjeblikket forskning i gang for at finde ud af det mest effektive spolearrangement for denne generator, og muligvis kan yderligere spoler være identiske med den første spole, spole “B” og alle tre spoler er fastgjort på samme måde, og kørsel vikles på hver spole betjenes gennem en enkelt højt vurderet og hurtigt skiftende transistor. Den nuværende opsætning ser sådan ud:

Du kan ignorere de viste portaler, da disse kun var inkluderet for at undersøge forskellige måder at aktivere transistoren på.
I øjeblikket fungerer spoler 6 og 7 (22 ohm hver) som ekstra udgangsspoler, der er fastgjort parallelt med udgangsspole 3, der er bygget med 3 tråde hver og med en modstand på 4,2 ohm. Disse kan være luftkerne eller med en solid jernkerne.
Ved test afslørede det, at luftkernevarianten fungerer bare lidt bedre end med en jernkerne. Hver af disse to spoler består af 4000 omdrejninger, der er viklet på spoler med en diameter på 22 mm ved hjælp af 0,7 mm (AWG # 21 eller swg 22) superemaleret kobbertråd. Alle spolerne har de samme specifikationer for ledningen.
Ved hjælp af denne opsætning af spolen kunne prototypen køre non-stop i omkring 21 dage og bevare drevbatteriet ved 12,7 volt konstant. Efter 21 dage var systemet stoppet for nogle ændringer og testet igen ved hjælp af et helt nyt arrangement.
I den ovenfor viste konstruktion er strømmen, der bevæger sig fra drevbatteriet til kredsløbet, faktisk 70 milliampere, hvilket ved 12,7 volt producerer en indgangseffekt på 0,89 watt. Udgangseffekten er cirka 40 watt, hvilket bekræfter en COP på 45.
Dette ekskl. De tre ekstra 12V-batterier, der desuden oplades samtidigt. Resultaterne ser faktisk ud til at være ekstremt imponerende for det foreslåede kredsløb.
Drevmetoden var blevet anvendt så mange gange af John Bedini, at skaberen valgte at eksperimentere med Johns tilgang til optimering for højeste effektivitet. Alligevel fandt han, at en Hall-effekt halvleder, der specifikt er justeret korrekt med en magnet, til sidst giver de mest effektive resultater.
Mere forskning fortsætter, og effektudgangen har på dette tidspunkt nået 60 watt. Dette ser virkelig fantastisk ud for et så lille system, især når du ser, at det ikke indeholder nogen realistisk input. Til dette næste trin reducerer vi batteriet til kun et. Opsætningen kan ses nedenfor:

Inden for denne opsætning påføres også spolen “B” med impulserne af transistoren, og output fra spolerne omkring rotoren kanaliseres nu til udgangsomformeren.
Her fjernes drevbatteriet og erstattes med en 30V transformer og diode med lav effekt. Dette betjenes igen fra inverterudgangen. At give rotoren et lille drejningskraft producerer rigelig opladning på kondensatoren for at muliggøre, at systemet svinger uden batteri. Udgangseffekten for denne nuværende opsætning kan ses gå op til 60 watt, hvilket er en fantastisk 50% forbedring.
De 3 12 volt batterier tages også af, og kredsløbet kan let køre med kun et enkelt batteri. Kontinuerlig effekt fra et ensomt batteri, der på ingen måde kræver ekstern genopladning, ser ud til at være en stor bedrift.
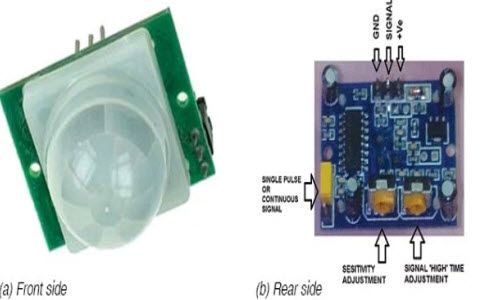
Den næste forbedring er gennem et kredsløb, der indeholder en Hall-effekt-sensor og en FET. Hall-effekt-sensoren er arrangeret nøjagtigt i tråd med magneterne. Betydning, sensoren er placeret mellem en af spolerne og rotormagneten. Vi har en afstand på 1 mm mellem sensoren og rotoren. Følgende billede viser, hvordan det skal gøres nøjagtigt:

Et andet billede ovenfra, når spolen er i den rigtige position:


Dette kredsløb viste en enorm 150 watt non-stop output ved hjælp af tre 12 volt batterier. Det første batteri hjælper med at drive kredsløbet, mens det andet genoplades via tre dioder, der er tilsluttet parallelt for at øge den aktuelle transmission for det batteri, der oplades.
DPDT-omskifteren “RL1” bytter batteriforbindelser hvert par minutter ved hjælp af nedenstående kredsløb. Denne handling gør det muligt for begge batterier at forblive fuldt opladede hele tiden.
Opladningsstrømmen løber også gennem et andet sæt med tre parallelle dioder, der genoplader det tredje 12 volt batteri. Dette 3. batteri betjener inverteren, gennem hvilken den påtænkte belastning køres. Testbelastningen, der blev brugt til denne opsætning, var en 100 watt pære og en 50 watt blæser.
Hall-effekt-sensoren skifter en NPN-transistor, alligevel fungerer stort set enhver hurtigt skiftende transistor, f.eks. En BC109 eller en 2N2222 BJT, meget godt. Du vil indse, at alle spolerne på dette tidspunkt drives af IRF840 FET. Relæet, der anvendes til omskiftningen, er en låsetype som angivet i dette design:

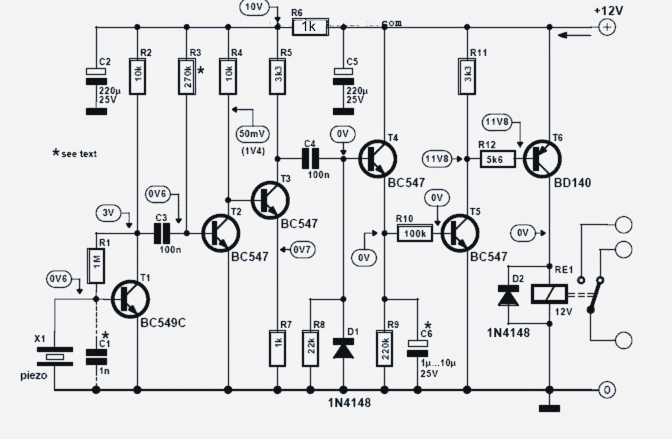
Og den drives af en IC555N-timer med lav strøm som vist nedenfor:

De blå kondensatorer vælges for at skifte det specifikke aktuelle relæ, der bruges i kredsløbet. Disse gør det muligt for relæet at være TIL og FRA hvert femte minut eller deromkring. 18K-modstandene over kondensatorerne er placeret til at aflade kondensatoren i løbet af de fem minutter, når timeren er i OFF-tilstand.
Men hvis du ikke ønsker at skifte mellem batterierne, kan du blot indstille det på følgende måde:

I dette arrangement er batteriet, der driver inverteren, der er forbundet med belastningen, specificeret med højere kapacitet. Selvom skaberen brugte et par 7 Ah-batterier, kan ethvert almindeligt 12-volt 12 Amp-Hour scooterbatteri bruges.
Dybest set er en af spolerne anvendt til at levere strøm til udgangsbatteriet og den resterende spole, som kan være den del af den tre-strengede hovedspole. Dette er vant til at levere forsyningsspænding direkte til drevbatteriet.
Dioden 1N5408 er klassificeret til at håndtere 100 volt 3-amp. Dioderne uden nogen værdi kan være en hvilken som helst diode såsom 1N4148-diode. Spolerne ender forbundet med IRF840 FET transistoren er fysisk installeret nær rotorens omkreds.
Man kan finde 5 sådanne spoler. De, der er grå i farve, afslører, at de tre yderste højre spoler består af de separate tråde af den primære 3-leder komposit spole, der allerede er afskærmet i vores tidligere kredsløb.
Mens vi så brugen af den tre-strengede snoede trådspole til Bedini-stil-omskiftning, der var inkorporeret til både drev- og outputformål, blev det i sidste ende fundet unødvendigt at inkorporere denne type spole.
Derfor blev en almindelig spiralformet viklingsspole bestående af 1500 gram emaljeret kobbertråd med en diameter på 0,71 mm fundet at være lige så effektiv. Yderligere eksperimenter og forskning hjalp med at udvikle følgende kredsløb, som fungerede endnu bedre end de tidligere versioner:

I dette forbedrede design finder vi brugen af et 12 volt ikke-fastgørelsesrelæ. Relæet er vurderet til at forbruge omkring 100 milliampere ved 12 volt.
Indsættelse af en 75 ohm eller en 100 ohm serie modstand i serie med relæspolen hjælper med at sænke forbruget til 60 milliampere.
Dette forbruges kun i halvdelen af tiden i dets driftsperioder, fordi det forbliver ikke-operativt, mens dets kontakter er i N / C-positionen. Ligesom de tidligere versioner styrer dette system sig selv på ubestemt tid uden nogen bekymringer.
Feedback fra en af de dedikerede læsere af denne blog, Mr. Thamal Indica
Kære Swagatam Sir,
Mange tak for dit svar, og jeg er dig taknemmelig for at opmuntre mig. Da du fremsatte denne anmodning til mig, havde jeg allerede rettet nogle flere 4 spoler til min lille Bedini-motor for at gøre den mere og mere effektiv. Men jeg kunne ikke oprette Bedini-kredsløb med transistorer til de 4 spoler, da jeg ikke kunne købe euipments.
Men stadig kører min Bedini Motor med de foregående 4 spoler, selvom der er et lille træk fra ferritkernerne i de nyligt tilsluttede andre fire spoler, da disse spoler ikke gør noget, men de sidder bare omkring min lille magnetrotor. Men min motor er stadig i stand til at oplade 12V 7A batteriet, når jeg kører det med 3,7 batterier.
På din anmodning har jeg vedhæftet hermed et videoklip af min bedini-motor, og jeg råder dig til at se det til slutningen, da voltmeteret i starten viser, at opladningsbatteriet har en 13,6 V, og efter start af motoren stiger det op til 13,7V og efter nogle 3 eller 4 minutter stiger den op til 13,8 V.
Jeg brugte 3,7V små batterier til at køre min lille Bedini Motor, og dette beviser effektiviteten af Bedini Motor godt. I min motor er 1 spole en Bifilar-spole, og andre 3-spoler udløses af den samme trigger af den Bifilar-spole, og disse tre spoler øger motorens energi ved at give nogle flere spolespidser, mens magnetrotoren fremskyndes. . Det er hemmeligheden bag min Small Bedini Motor, da jeg forbinder spolerne i parallel tilstand.
Jeg er sikker på, at når jeg bruger de andre 4 spoler med bedini-kredsløb, fungerer min motor mere effektivt, og magnetrotoren vil dreje i en enorm hastighed.
Jeg sender dig endnu et videoklip, når jeg er færdig med at oprette Bedini Circuits.
Med venlig hilsen !
Thamal indika
Praktiske testresultater
https://youtu.be/k29w4I-MLa8Forrige: P-Channel MOSFET i H-Bridge-applikationer Næste: CMOS IC LMC555 datablad - Arbejder med 1,5 V forsyning