Indlægget forklarer en metode, som sandsynligvis kan bruges til at forbedre en passiv infrarød sensorevne til at detektere selv en statisk eller stationær menneskelig tilstedeværelse. Denne funktion er normalt ikke mulig med de konventionelle PIR-sensorer.
Hvordan PIR opdager menneskelig tilstedeværelse
Jeg har allerede diskuteret mange PIR-baserede bevægelsesdetektorapplikationer på dette websted, men alle disse applikationer kræver, at den menneskelige tilstedeværelse konstant er i bevægelse for at holde PIR detekterende deres tilstedeværelse, det ser ud til at være en stor ulempe, der forhindrer disse enheder i at føle en konstant eller en stationær menneskelig belægning.
Imidlertid har den ovenfor forklarede ulempe en grund bag sig. De konventionelle PIR-sensorer fungerer ved at registrere IR-signaler fra en menneskelig krop gennem et par parallelle slots på deres forreste linse, og dets interne kredsløb aktiveres kun, når IR-signalerne krydser mellem disse sensing slots ('visioner').
Krydsning af IR-signaler på tværs af senseringsåbningerne gør det muligt for PIR-kredsløbet at oversætte informationen til to tilsvarende alternerende impulser, som igen er rettet for at generere udløsningsspændingen ved PIR's udpind.
PIR kan ikke registrere papirvarer
Dette indebærer, at hvis IR-kilden er ubevægelig, vil den ikke bede PIR-modulet om at producere nogen udløser på tværs af dens outputnål. Det indebærer også, at IR-signalet fra kilden på en eller anden måde skal fortsætte med at krydse på tværs af de givne PIR-detekteringshuler for at gøre det muligt at fornemme et givet menneske inden for zonen.
Det ser ud til, at der ikke er noget direkte eller simpelt middel til dette, fordi PIR-modulerne ikke kan ændres internt til dette, hvilket lammer enheden fra at opdage stationær menneskelig tilstedeværelse.
En logisk overholdelse fortæller os imidlertid, at hvis det er en varierende IR-kilde, der muligvis kræves for at holde PIR-modulet aktiveret, hvorfor så ikke tvinge selve PIR til at være i en konstant bevægelse i stedet for motivet.
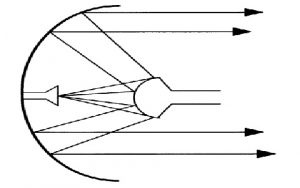
Konceptet kan visualiseres fra følgende GIF-simulering, der viser et oscillerende PIR-modul og et statisk menneske i detekteringszonen.

Her kan vi se, hvordan en oscillerende PIR tilpasser sig problemet og transformerer sig selv, hvilket muliggør påvisning af selv statiske IR-motiver.
Dette bliver muligt, fordi PIR-modulet gennem sin bevægelse omdanner den stationære IR-kilde til en konstant skiftende IR-billeddannelse på tværs af sine to modtagelsesslots.
Selv om ideen ser kompleks ud, kan den faktisk løses ved hjælp af et langsomt oscillerende PwM-styret motorkredsløb.
Vi lærer hele mekanismen og kredsløbsdetaljerne i de følgende afsnit.
Som vi allerede har diskuteret, er konventionelle PIR-moduler i stand til kun at detektere levende objekter i bevægelse og kan ikke identificere et stationært mål, der begrænser dets anvendelse kun som en menneskelig bevægelsesdetektor.
Til applikationer, hvor detektion af motiolesss menneskelig belægning bliver nødvendigt i sådanne scenarier, kan en konventionel PIR blive ubrugelig og muligvis kræve et eksternt arrangement for at opgradere sig selv.
Design af PIR til at opdage ubevægelige mål
I ovenstående afsnit lærte vi, at i stedet for at behøve, at målet skal være i bevægelse, kan PIR-modulet selv flyttes over en given radius til implementering af den ønskede statiske måldetektion.
I de følgende afsnit lærer vi os om en simpel kredsløbsmekanisme, der kan bruges med en PIR monteret over en lille DC-motor til de foreslåede svingninger.
PWM / Flip Flop-styret motordriver
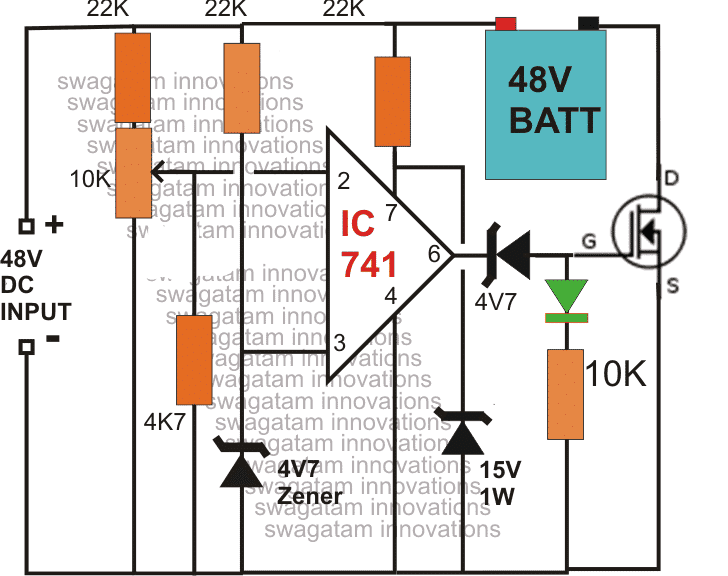
Systemet kræver grundlæggende en PWM-styret hastighedsbestemmelse og en flip-flop-omstilling til motoren. Følgende diagram viser, hvordan disse funktioner kan tilskrives PIR-motoren ved hjælp af et simpelt kredsløb:

Det viste kredsløb anvender en enkelt IC HEF40106 hex inverterende schmitt gate IC, der inkluderer 6 inverter IKKE porte.
Portene N1 og N2 er konfigureret til at frembringe en justerbar PWM-udgang, der føres til portene N4, N5, N6 og danner bufferne.
Det fælles output fra disse bufferporte afsluttes til porten til en motorchauffør.
PWM-indholdet indstilles ved hjælp af P1, som til sidst påføres den tilsluttede motor via et sæt DPDT-relækontakter.
Disse relækontakter bestemmer motorens bevægelsesretning (med eller mod uret).
Denne flip-flop DPDT-relækontakter styres af en astabel timer konfigureret omkring porten N3, hvor kondensatoren C3 / R3 bestemmer med hvilken hastighed relæet skal skifte for at tillade motoren at ændre sin rotationsretning konsekvent.
Ovenstående design tillader motoren at udføre den krævede langsomme frem og tilbage oscillerende bevægelse over en given radial zone.
C3 kan vælges til at starte skiftet efter hvert 5 til 6 sekund, og PWm kan justeres for at muliggøre en ekstremt træg motorbevægelse, fordi det bare skal sikre, at PIR-spalterne krydser IR-signaler fra målet i rettidigt.
Men da motordriften er langsom, skal output fra PIR opretholdes gennem en forsinket OFF-timer, så den tilsluttede belastning ikke slukker og tændes, mens motorbevægelsen skiftevis skifter gennem IR-linjerne fra den menneskelige belægning.
Forsinkelsestimeren
Det følgende forsinkelsestimer kredsløbstrin kan bruges, som sørger for, at hver gang PIR-udgangen producerer den registrerede puls, forlænges forsinkelsen fra timeren i 5 til 10 sekunder, og den tilsluttede belastning afbrydes aldrig under processen.

I ovenstående opsætning kan vi se motoren, der modtager sin elektriske drevforsyning fra PWM / flip-flop-trinnet som beskrevet i foregående afsnit.
Motorens spindel kan ses sammenkoblet med en vandret aksel, over hvilken PIR er fastspændt, således at PIR gennemgår en tilsvarende skiftende radial frem og tilbage bevægelse, når motoren bevæger sig.
Mens den ovennævnte PIR-bevægelse induceres, detekteres IR-signalerne fra et stationært mål i zonen i form af korte alternative impulser, der genereres ved udgangsstiften på PIR, der er angivet med den blå ledning.
Disse impulser påføres over 1000uF kondensatoren, som oplades med hver puls og sørger for, at BC547 holdes i ledende tilstand uden en afbrydelse under processen.
Relædriveren, der består af BC557-trinnet, reagerer på det ovennævnte stabile signal fra BC547-samleren og holder igen relæet TIL, så længe PIR fortsat opdager en menneskelig tilstedeværelse.
Relæbelastningen forbliver således aktiveret kontinuerligt på grund af tilstedeværelsen af et stationært menneske i området.
I tilfælde af, at den menneskelige belægning fjernes, eller når målet bevæger sig væk fra zonen, holder forsinkelsestimetrinet relæet og belastningen aktiveret i de fastsatte 5 til 10 sekunder, hvorefter den slukker permanent, indtil zonen igen er fanget af en potentiel IR-udspringende kilde.
Liste over dele
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1 uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST SWITCH ELLER DPDT RELAY
- R3, C3 skal bestemmes af nogle forsøg og fejl
OPDATERING:
Ovenstående forklarede PIR-kredsløb til detektering af statisk menneskelig tilstedeværelse kan forenkles meget ved at anvende et signalchopper-kredsløb som vist i følgende GIF-simulering:
En omhyggelig inspektion viser, at faktisk en oscillerende bevægelse simpelthen ikke er påkrævet, motoren og huggerbladet kunne få lov til at rotere frit ved at holde motorhastighed på et lavere niveau .
Dette ville også effektivt udføre den tilsigtede statiske PIR-sensing-operation.

Videodemo, der beviser den statiske menneskelige detektion for en PIR
Forrige: 3 lydaktiverede switchkredsløb forklaret Næste: 4 enkle sirenekredsløb, du kan bygge hjemme