EN servomotor fungerer som en roterende aktuator, der hovedsageligt bruges til at ændre elektrisk input til mekanisk acceleration. Denne motor fungerer baseret på servomekanisme, uanset hvor positionsfeedbacken bruges til at kontrollere hastigheden og den endelige placering af motoren. Servomotorer drejer og får en vis vinkel baseret på det anvendte input. Servomotorer er små i størrelse, men de er meget energieffektive. Disse motorer er klassificeret i to typer som AC servomotor & DC servomotor, men den største forskel mellem disse to motorer er den anvendte strømkilde. Udførelsen af en DC servomotor afhænger hovedsageligt kun af spænding, mens en AC-servomotor afhænger af både spænding og frekvens. Denne artikel diskuterer en af typerne af servomotorer - en AC servomotor – arbejde med applikationer.
Hvad er AC-servomotor?
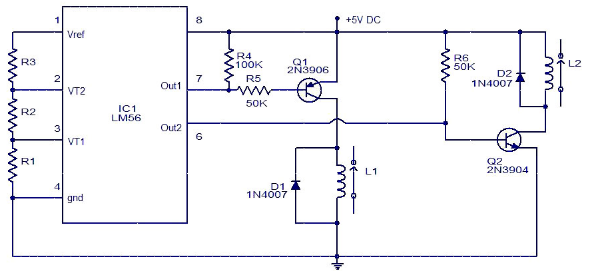
En type servomotor, der genererer mekanisk output ved at bruge AC elektrisk input i den præcise vinkelhastighedsform kaldes en AC servomotor. Udgangseffekten fra denne servomotor varierer hovedsageligt fra watt til nogle få 100 watt. Driftsfrekvensen for AC-servomotorer varierer fra 50 til 400 Hz. AC servomotordiagrammet er vist nedenfor.

Hovedtræk ved ac servomotorer omfatter hovedsageligt; disse er færre vægte, hvilket giver stabilitet og pålidelighed inden for driften, støj genereres ikke under drift, hvilket giver lineære moment-hastighedskarakteristika og reducerede vedligeholdelsesomkostninger, når slæberinge og børster ikke er til stede.
Se venligst dette link for at vide mere om AC servomotortyper
AC Servo Motor Konstruktion
Generelt er en AC servomotor en tofaset induktionsmotor. Denne motor er konstrueret ved hjælp af en stator og en rotor som en normal induktionsmotor. Generelt har statoren på denne servomotor en lamineret struktur. Denne stator inkluderer to viklinger, der er placeret 90 grader fra hinanden i rummet. På grund af denne fasevariation genereres et roterende magnetfelt.

Den første vikling er kendt som hovedviklingen eller også kendt som fast fase eller referencevikling. Her aktiveres hovedviklingen fra konstantspændingsforsyningskilden, mens den anden vikling som styreviklingen eller styrefasen aktiveres af den variable styrespænding. Denne styrespænding forsynes ganske enkelt fra en servoforstærker.

Generelt er rotoren tilgængelig i to typer egernburtype og trækkoptype. Rotoren, der bruges i denne motor, er en normal rotor af bur-typen, inklusive aluminiumsstænger fastgjort i slidser og kortsluttet gennem enderinge. Luftspalten holdes minimal for maksimal fluxforbindelse. Den anden type rotor som en trækkop bruges hovedsageligt, hvor inertien af det roterende system bliver lav. Så dette hjælper med at reducere strømforbruget.
Arbejdsprincip for AC Servomotor
Arbejdsprincippet for AC-servomotoren er; for det første gives en konstant vekselspænding ved startorens hovedvikling af servomotoren, og en anden statorterminal forbindes ganske enkelt til styretransformatoren gennem hele styreviklingen. På grund af den påførte referencespænding vil synkrongeneratorens aksel rotere med en bestemt hastighed og opnå en bestemt vinkelposition.

Derudover har styretransformatorens aksel en specifik vinkelposition, der sammenlignes med vinkelpunktet på synkrogeneratorens aksel. Så sammenligningen af to vinkelpositioner vil give fejlsignalet. Mere specifikt evalueres spændingsniveauerne for de ækvivalente akselpositioner, hvilket frembringer fejlsignalet. Så dette fejlsignal kommunikerer med det aktuelle spændingsniveau på styretransformatoren. Derefter gives dette signal til servoforstærkeren, så den genererer ujævn styrespænding.
Ved denne påførte spænding opnår rotoren igen en specifik hastighed, starter omdrejning og opretholder indtil fejlsignalværdien når nul, så den foretrukne position for motoren opnås i AC-servomotorerne.
Overførselsfunktion af AC-servomotor
AC-servomotorens overførselsfunktion kan defineres som forholdet mellem LT (Laplace Transform) af outputvariablen og L.T (Laplace Transform) af inputvariablen. Det er altså den matematiske model, der udtrykker differentialligningen, der fortæller systemets o/p til i/p.
Hvis T.F. (overførselsfunktion) for ethvert system er kendt, så kan outputresponset beregnes for forskellige typer input for at genkende systemets natur. Tilsvarende, hvis overførselsfunktionen (TF) ikke er kendt, kan den eksperimentelt findes ved blot at anvende kendte input til enheden og studere systemets output.
AC servomotor er en to-faset induktionsmotor, hvilket betyder, at den har to viklinger som kontrolvikling (hovedfeltvikling) og referencevikling (spændende vikling).

Så vi er nødt til at finde ud af overførselsfunktionen af AC-servomotor, dvs. θ(s)/ec(s). Her er 'θ(s)/' systemets output, mens ex'en (s) er systemets input.
For at finde ud af motorens overførselsfunktion skal vi finde ud af, hvad der er drejningsmoment udviklet af motoren 'Tm' og drejningsmomentet udviklet af belastningen 'Tl'. Hvis vi sidestiller ligevægtstilstanden som
Tm = Tl, så kan vi få overførselsfunktionen.
Lad, Tm = drejningsmoment udviklet af motoren.
Tl = drejningsmoment udviklet af belastningen eller belastningsmoment.
'θ' = vinkelforskydning.
'ω' = d θ/dt = vinkelhastighed.
'J' = inertimoment for belastningen.
'B' er dashpot for lasten.
Her er de to konstanter, der skal betragtes, K1 & K2.
'K1' er hældningen af styrefasespænding vs drejningsmomentkarakteristika.
'K2' er hældningen af hastighedsmomentkarakteristika.
Her er drejningsmomentet udviklet af motoren blot angivet med
Tm = K1ec- K2 dθ/dt —–(1)
Belastningsmomentet (TL) kan modelleres ved at overveje momentbalanceligningen.
Påført moment = modsat moment på grund af J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Vi ved, at ligevægtsbetingelsen Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Anvend Laplace-transformationsligningen på ovenstående ligning
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/S [B + JS + K2]
= K1/S [B + K2 + JS]
= K1/S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Hvor Km = K1/ B + K2 = motorforstærkningskonstant.
Tm = J/ B + K2 = motorens tidskonstant.
AC-servomotorhastighedskontrolmetoder
Generelt servo motorer har tre kontrolmetoder som positionskontrol, momentkontrol og hastighedskontrol.
Positionskontrolmetoden bruges til at bestemme størrelsen af rotationshastigheden gennem eksterne indgangsfrekvenssignaler. Omdrejningsvinklen bestemmes af nr. af pulser. Positionen og hastigheden af en servomotor kan tildeles direkte via kommunikation. Da metodens position kan have ekstremt streng kontrol over position og hastighed, bruges den normalt i positioneringsapplikationen.
I momentstyringsmetoden indstilles servomotorens udgangsmoment af analog indgang på adressen. Det kan ændre drejningsmomentet ved blot at ændre det analoge i realtid. Derudover kan den også ændre værdien på den relative adresse gennem kommunikation.
I hastighedskontroltilstand kan motorhastigheden styres af analog input og puls. Hvis der er præcisionskrav og ingen bekymring for så meget drejningsmoment, er hastighedstilstand bedre.
Karakteristika for AC Servo Motor
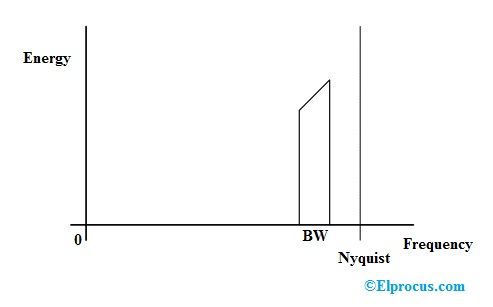
Drejningsmomenthastighedsegenskaberne for en AC-servomotor er vist nedenfor. I de følgende karakteristika ændres drejningsmomentet med hastigheden, men ikke lineært, fordi det hovedsageligt afhænger af forholdet mellem reaktans (X) og modstand (R). Den lave værdi af dette forhold involverer, at motoren har høj modstand og lav reaktans, i sådanne tilfælde er motoregenskaberne mere lineære end den høje forholdsværdi for reaktans (X) til modstand (R).

Fordele
Fordelene ved AC servomotorer omfatter følgende.
- Hastighedskontrolegenskaberne for denne motor er gode.
- De genererer mindre mængde varme.
- De tilbyder høj effektivitet, mere drejningsmoment pr. vægt, pålidelighed og reduceret RF-støj.
- De har brug for mindre vedligeholdelse.
- De har en længere forventet levetid, hvis der ikke findes en kommutator.
- Disse motorer er i stand til at håndtere højere strømstød i industrimaskiner.
- Ved høje hastigheder giver de mere konstant drejningsmoment.
- Disse er meget pålidelige.
- De giver højhastighedsydelse.
- Disse er velegnede til ustabile belastningsapplikationer.
Ulemperne ved AC servomotorer omfatter følgende.
- AC servomotorstyring er vanskeligere.
- Disse motorer kan gå i stykker ved konstant overbelastning.
- Gearkasser er ofte nødvendige for at overføre kraft ved høje hastigheder.
Ansøgninger
Anvendelsen af AC servomotorer omfatter følgende.
- AC servomotorer er anvendelige, hvor positionsregulering er betydelig og findes normalt i halvlederenheder, robotter, fly og værktøjsmaskiner.
- Disse motorer bruges i instrumenter, der fungerer på servomekanismer som i computere og positionskontrolenheder.
- AC servomotor bruges i værktøjsmaskiner, robotmaskiner og sporingssystemer.
- Disse servomotorer bruges i en række forskellige industrier på grund af deres effektivitet og alsidighed.
- AC servomotoren bruges i de fleste almindelige maskiner og apparater som vandvarmere, ovne, pumper, terrængående køretøjer, udstyr i haver osv.
- Mange af de apparater og værktøjer, der bruges hver dag i huset, er strømdrevet af AC servomotorer.
Dette er således en oversigt over ac servomotorer – fungerer med ansøgninger. Disse motorer bruges i mange applikationer som instrumenter, der fungerer på servomekanismer og også værktøjsmaskiner, sporingssystemer og robotter. Her er et spørgsmål til dig, hvad er en induktionsmotor?