Selv om en quadcopter-fjernbetjeningskredsløb meget let kan købes fra markedet eller fra enhver onlinebutik, har en ivrig elektronisk hobby aldrig lov til at lære, hvordan disse faktisk fungerer, og om disse kan bygges derhjemme eller ej?
I denne artikel vil vi forsøge at opbygge en simpelt quadcopter fjernbetjeningskredsløb ved hjælp af diskrete komponenter og brug af RF-fjernbetjeningsmoduler og uden at involvere de komplekse MCU-baserede kredsløb.
Trin-for-trin guide vil faktisk få de interesserede hobbyister til at forstå, hvordan simpelthen en quadcopter kan styres ved hjælp af et PWM-koncept.
Vi har allerede lært quadcopter basics Lad os nu undersøge en fjernbetjeningssektion, som i sidste ende vil hjælpe med at flyve enheden eksternt.
Grundlæggende moduler påkrævet
De vigtigste ingredienser, der kan være nødvendige for projektet, er angivet som under:
Vi vil grundlæggende kræve følgende 3 kredsløbstrin:
1) 4-vejs RF-fjernbetjening Tx, Rx-moduler - 1 sæt
2) IC 555-baserede PWM-generator kredsløb - 4 nr
3) BLDC-motorstyringskredsløb - 4 nr
Da det er en hjemmelavet version, kan vi forvente nogle ineffektiviteter med det foreslåede design, såsom fraværet af joysticks til kontrolelementerne, der erstattes med potter eller potentiometre. Ikke desto mindre kan systemets funktionsevne forventes at være på niveau med professionelle enheder.
Den håndholdte PWM-senderenhed består grundlæggende af Tx-fjernmodulet integreret med 4 diskrete PWM-kontrolkredsløb, mens quadcopteren skal lukkes med 1 Rx-kredsløb integreret med 4 diskrete BLDC-driverkredsløb.
Lad os begynde med quadcoptermotorkredsløbene, og se hvordan BLDC-motorstyringen skal konfigureres og fastgøres med Rx-kredsløbet.
Quadcopter PWM modtager kredsløb
I et af de tidligere indlæg lærte vi, hvordan en alsidig BLDC-motorstyring kunne bygges ved hjælp af en enkelt chip, men dette design er ikke designet til at betjene relativt tungere motorer i en quadcopter, derfor er det muligvis ikke egnet til den foreliggende anvendelse.
En 'storebror' mulighed for ovenstående kredsløb er heldigvis tilgængelig og bliver perfekt egnet til kørsel af quadcoptermotorer. Tak til TEXAS INSTRUMENTS for at give os sådanne vidunderlige single chip applikationsspecificerede kredsløbsmoduler.
For at lære mere om denne højt nuværende BLDC driver IC, kan du henvise til følgende pdf datablad af den samme
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Opsætningen nedenfor viser den komplette kredsløbsskema for quadcopter motor driver controller ved hjælp af DRV11873 IC, som er et selvstændigt lavstrøms BLDC motorkredsløb bestående af alle de nødvendige beskyttelsesfunktioner såsom overbelastningsbeskyttelse, termisk beskyttelse osv. Dette modul danner grundlæggende ESC til vores nuværende quadcopter-enhed.
For mere information om dette design og PCB-detaljer kan du henvise til originaldokumentet nedenfor:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Hvordan det virker
FS- og FG-pinouts på IC'en er til at forbedre IC'en med ekstra kontroller gennem eksterne kredsløb, da vi ikke bruger disse funktioner i vores design, kan disse ben holdes ubrugte og afsluttes til den positive linje gennem en 100K modstand.
RD pinout af IC bestemmer motorens rotationsretning. Tilslutning af denne stift til Vcc via en 100K modstand muliggør en rotation mod uret på motoren, mens den ikke er tilsluttet, gør det modsatte og giver motoren mulighed for at dreje med uret.
Stift nr. 16 er, at PWM-indgangen bruges til at indsprøjte en PWM-indgang fra en ekstern kilde, ved at variere PWM's driftscyklus ændrer motorens hastighed tilsvarende.
FR, CS pinouts er også irrelevante for behovet og kan derfor efterlades ubrugt som vist i diagrammet og afsluttes til den positive linje gennem en 100K modstand.
U, V, W pinouts er motorudgange, der skal forbindes med den respektive quadcopter BLDC 3-faset motor.
COM pinout er til tilslutning af den fælles ledning til 3-faset motor, hvis din motor ikke har en fælles ledning, kan du simpelt simulere den ved at forbinde 3 nos 2k2 modstande til U, W, W stifterne og derefter slutte sig til deres fælles ender med COM-stift på IC.
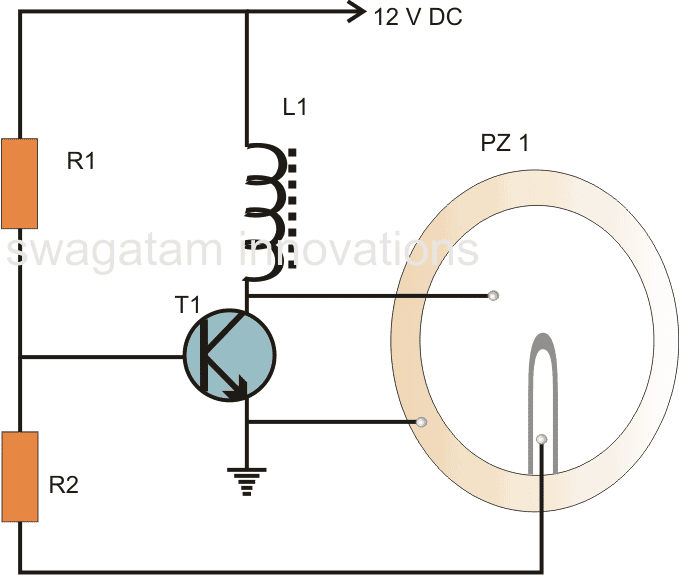
Skematisk viser også en IC 555 konfigureret i PWM-stabil kredsløbstilstand. Dette bliver en del af kredsløbsmodulet, og PWM-udgangen fra dens pin nr. 7 kan ses forbundet med PWM-indgangen på DRV IC-kredsløbet for at starte de 4 motorer med en konstant basehastighed og for at aktivere motoren konstant svævende hastighed på et givet sted.
Dette afslutter det primære ELC-kredsløb eller BLDC-driverkredsløbet til quadcopter-design.
Vi har brug for fire sådanne moduler til de fire motorer i vores quadcopter-design.
Det betyder, at 4 sådanne DRV IC sammen med IC 555 PWM-scenen skal knyttes til hver af de fire motorer i quadcopteren.
Disse moduler vil sikre, at normalt er alle 4 motorer indstillet til en forudbestemt hastighed ved at anvende et fast og identisk PWM-signal til hver af de relevante DRV-controller-IC'er.
Lad os nu lære, hvordan PWM kan ændres gennem en fjernbetjening for at ændre hastighederne på den enkelte motor ved hjælp af et almindeligt 4-kanals fjernbetjeningshåndsæt.
RF-modtagermodulet (PWM-dekoder)

Ovenstående kredsløb viser modtagerens fjernbetjening RF-kredsløb, som formodes at være placeret inde i quadcopteren til modtagelse af eksterne trådløse PWM-data fra brugerens fjerntransmitterhåndsæt og derefter behandle signalerne passende for at føde de medfølgende DRV-styringsmoduler som forklaret i forrige afsnit.
De 4 udgange navngivet som PWM # 1… .PWM # 4 skal tilsluttes PWM pin # 15 på DRV IC som angivet i det foregående diagram.
Disse PWM-pinouts fra RF-modtagerenheden aktiveres, hver gang brugeren trykker på den tilsvarende knap i sit senderhåndsæt.
Sådan skal kablet til RF-transmitteren (PWM Encoder)
I ovenstående afsnit diskuterede vi Rx eller fjernmodtagerkredsløbet, og hvordan dets 4 udgange skal forbindes med quadcopter motor ESC driver moduler.
Her ser vi, hvordan den enkle RF-sender skal oprettes og kables med PWM-kredsløb til transmission af PWM-dataene trådløst til quadcopter-modtagerenheden, så hastighederne på den enkelte motor styres blot med et tryk på en knap, hvilket i sidste ende forårsager quadcopter for at ændre retning eller dens hastighed i henhold til brugernes præferencer.

Ovenstående kredsløb viser ledningsdetaljerne for transmittermodulet. Ideen ser ret enkel ud, hovedsenderkredsløbet er dannet af TSW434-chippen, der transmitterer de kodede PWM-signaler til atmosfæren, og HT12E, som bliver ansvarlig for at føde de kodede signaler til TSW-chippen.
PWM-signalerne genereres af 4 separate IC 555-kredsløbstrin, som kan være identiske med det, der tidligere blev diskuteret i DRV-styreenhedsmodulet.
PWM-indholdet af de 4 IC'er kan ses afsluttet til de respektive pinouts på koderen IC HT12E gennem 4 diskrete trykknapper angivet som SW1 ---- SW4.
Hver af disse knapper svarer til og skifter den samme pinout på modtagermodulet, som vi diskuterede tidligere og angivet som PWM # 1, PWM # 2… ..PWM # 4.
Betydning ved at trykke på SW1 kan medføre, at PWM # 1-udgangen fra modtagerenheden er aktiv, og dette vil pinout begynde at fodre de modtagne dekodede PWM-signaler fra senderen til det tilknyttede DRV-modul og igen få den relevante motor til at ændre dens hastighed i overensstemmelse hermed.
Tilsvarende kan trykke på SW2,3,4 bruges til at påvirke hastighederne på de andre 3 quadcoptermotorer, som brugerne ønsker.
IC 555 PWM-kredsløb
De 4 PWM-kredsløb, der er vist i ovenstående RF-senderhåndsæt, kan bygges ved at henvise til det følgende diagram, der svarer nøjagtigt til det, der blev set vores DRV-controller ESC-kredsløb.

Husk, at 5K-potten kunne være i form af en almindelig potte, og denne potte kunne bruges yderligere med knapperne til valg af forskellige hastigheder på de tilsvarende motorer.
Betydning ved at holde en valgt knap nede og samtidig flytte den tilsvarende 5KPWMpot, kan man få quadcopteren til at øge eller mindske hastigheden i den tilsigtede retning.
Alternativt kunne PWM oprindeligt indstilles på et højere eller lavere niveau, og derefter trykkes på den tilsvarende knap for at aktivere den tilsvarende quadcoptermotor at nå den foretrukne hastighed i henhold til PWM-indstillingen.
Quadcopter Motor Specifikation
Ovenstående forklarede Qiadcopter-fjernbetjeningskredsløb er kun beregnet til brug til visningsformål og kan ikke bruges til at løfte belastninger eller et kamera. Dette indebærer, at de motorer, der anvendes i designet, fortrinsvis skal være af lav strømtype.
DRV11873 IC er designet til at opeatere motorer med en nominel effekt på 15V, 1,5 ampere eller omkring 20 watt motor ... så enhver 3-faset BLDC-motor med en nominel på 15 til 30 watt kan bruges til formålet.
Batteriet til dette quadcopter-design kan være ethvert 12v Lipo pr Li-ion-batteri, der er i stand til at levere 15V peak ved 1,5 ampere kontinuerlig strøm.
Specifikationsdetaljer
1306N børsteløs Outrunner Miniature DC-motor
Type: Mikromotor
Konstruktion: Permanent magnet
Pendling: børsteløs
Hastighed (RPM): 2200 o / min
Kontinuerlig strøm (A): 1,5 ~ 2,6A
Spænding (V): 7,4 ~ 11,1V
DC-motor til miniature: AX-1306N
vægt: 8 g
skaftets diameter: 1,5 mm
Batteri LI-PO: 2-3 sek
driftsstrøm: 1,5 ~ 2,6A
maksimal effektivitet: 67%

Forrige: Sensorløs BLDC-motordriverkreds Næste: Heater Controller Circuit ved hjælp af trykknapper