I dette indlæg undersøger vi de tekniske specifikationer og detaljerede oplysninger om IC L293, som er en alsidig quad half-H driver IC, og kan bruges til at implementere mange interessante motorer driverbaseret kredsløb applikationer, såsom til betjening af motorer, solenoider og andre induktive belastninger (4 enheder separat eller parvis gennem push-pull-tilstand).
Hvordan det virker
IC L293 inkluderer grundlæggende to par udgange, som uafhængigt kan bruges til at betjene to separate belastninger i en push pull-tilstand eller på en tovejs måde, også kaldet totempoletilstand. Alternativt kan disse par par udgange være individuelt bruges til at betjene 4 individuelle belastninger på envejs måde.
Ovennævnte operationer af belastningerne styres gennem tilsvarende input pinouts, udløst fra et eksternt oscillatorkredsløb eller en PWM kilde .
For eksempel, hvis belastningen skal betjenes på en totempolet måde, kunne de tilsvarende indgange fra de to driver-trin i IC'en udløses fra en ekstern oscillator som gennem et par NAND-porte , hvor den ene port kunne forbindes som en oscillator, mens den anden som en inverter.
De to antifasesignaler fra disse NAND porte derefter kunne forbindes med indgangene på L293 til at betjene de relevante udgange på en totempol (push-pull) måde, som igen ville køre den tilsluttede belastning på samme måde.
Pinouts-tildeling af IC L293
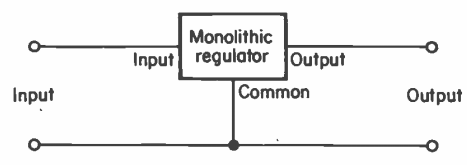
Lad os nu lære pinout-funktionerne på IC L293 ved at henvise til følgende diagram og fra følgende forklaring:

Stift nr. 2 er kontrolindgangen, som styrer udgangsstiften nr. 3.
Tilsvarende er ben nr. 7 kontrolindgangen for udgangsstift nr. 6.
Pin nr. 1 bruges til enten at aktivere eller deaktivere ovenstående sæt pinouts. En positiv ved pin nr. 1 holder ovenstående sæt pinouts aktiveret og aktiv, mens en negativ eller 0V-forsyning øjeblikkeligt deaktiverer dem.
Helt identisk bliver Pin # 15 og pin # 10 kontrolindgangene for de tilsvarende pin # 14 og pin # 11-udgange, og disse forbliver kun i drift, så længe pin # 9 holdes ved positiv logik og er deaktiveret, når en 0V-logik er anvendt på denne pinout.
Som tidligere forklaret kan ben nr. 3 og ben nr. 6 bruges som totempolepar ved at føde et antifaselogisk signal på deres indgangsstift nr. 7 og ben nr. 2. Betydning, når pin nr. 2 fodres med en positiv logik, skal pin nr. 7 have en negativ logik og omvendt.
Dette gør det muligt for udgangsbenet nr. 6 og ben nr. 3 at betjene den tilsluttede belastning i en tilsvarende retning, og omvendt når indgangslogiske signaler vendes, omvendes belastningspolariteten, og den begynder at rotere i den modsatte retning.
Hvis denne sekvens hurtigt skiftes, fungerer belastningen tilsvarende frem og tilbage eller på en push pull-måde.
Ovenstående operation kan også replikeres over det andet sidepar af drivere.
Vcc eller forsyningspositive indgange til IC'et er konfigureret uafhængigt af to forskellige forsyningsindgange.
Pin # 16, (Vcc1) bruges til at betjene aktiverings pinouts og til at betjene andre interne logiske faser af IC, og dette kan forsynes med en indgang på 5V, selvom maksimal begrænsning er 36V
Pin # 8, (Vcc2) bruges specifikt til at drive motorerne, og denne kan fodres med alt fra 4,5V til 36V
Elektrisk specifikation af IC L293
IC L293 er designet til at fungere med en hvilken som helst forsyning mellem 4,5V og 36V, med en maksimal strømhåndteringsspecifikation på ikke mere end 1 amp (2 Amp i pulsfunktion, maks. 5ms)
Derfor kan enhver belastning inden for de ovennævnte specifikationer betjenes på tværs af de diskuterede udgange fra IC L293.
Indgangskontrologikken bør ikke overskrides over 7V, hvad enten det er en kontinuerlig forsyning eller en PWM-forsyning.
Brug af L293 IC til motorstyringsapplikation
Lad os nu lære at implementere motorstyringskredsløb ved hjælp af IC L293 gennem forskellige driftsformer og ved at bruge så mange som 4 motorer med separat kontrolfacilitet.
I vores tidligere indlæg studerede vi pinout og funktionsdetaljerne for IC L293, her lærer vi, hvordan den samme IC kan bruges til at kontrollere motorer gennem specifikke tilstande og konfigurationer.
Kontroltilstande
IC L293 kan bruges til styring af motorer i følgende tilstande:
1) 4 motorer via uafhængige PWM-indgange.
2) 2 Motorer i tovejs eller totempoletilstand med hastighedskontrol gennem PWM
3) Én 2-faset BLDC-motor ved hjælp af PWM-indgang
Billedet nedenfor viser, hvordan IC'et kunne bruges til at styre motorer med uafhængige kontroller, og også hvordan en enkelt motor kunne bruges til at opnå en tovejskontrol :

Venstre side af IC viser en motor, der er konfigureret til at fungere i tovejs-tilstand. For at sikre, at motoren spinder i en af de valgte retninger, skal pin nr. 1 og pin nr. 7 påføres med en anti-fase 5V DC-indgang. For at ændre retning for motorrotationen kunne denne 5V polaritet ændres på tværs af de nævnte input pinouts.
Pin nr. 1 skal holdes logisk højt for at holde motoren og IC-funktionen aktiveret, en logik 0 her stopper øjeblikkeligt motoren.
Forsyningen ved kontrolindgangens pinouts kunne være i form af en PWM, dette kunne desuden bruges til styring af motorens hastighed fra 0 til maksimum ved blot at variere PWM-driftscyklussen.
Højre side af IC viser et arrangement, hvor et par motorer styres uafhængigt af uafhængige PWM-indgange ved den respektive pin # 15 og pin # 10.
Stift nr. 9 skal holdes logisk højt for at motoren og IC'en skal fungere. Et logisk nul ved denne pinout vil øjeblikkeligt stoppe og deaktivere funktionen af de tilsluttede motorer.
Da venstre og højre sidesektion af IC'en er identiske med deres pinout-funktionsdetaljer, kunne det viste arrangement af motorerne skiftes over de relevante pinouts for at opnå identisk funktion som forklaret ovenfor, hvilket betyder at to individuelle motorer kunne forbindes ved venstre side af IC nøjagtigt som implementeret på højre side af IC i diagrammet.
På samme måde kunne det tovejssystem blive inkorporeret på højre side af IC-pinouts nøjagtigt som opnået på venstre side af IC i det ovennævnte viste diagram.
Ovenstående eksempel viser, hvordan IC L293 kan bruges til at styre 4 motorer hver for sig eller 2 motorer i tovejs-tilstand, og hvordan hastigheden også kan styres ved hjælp af en PWM-tilførsel ved de relevante indgangsudtag af IC.
Brug L293 til at styre en 2-faset BLDC-motor

I ovenstående billede kan vi se, hvordan IC L293 kan konfigureres til at styre en 2-faset BLDC-motor ved hjælp af de angivne pinouts og gennem et par kontrolindgange vist som kontrol A og kontrol B.
En enkelt 2-faset motor kan ses forbundet på tværs af udgangene på IC, mens indgangene er kablet med et sæt IKKE porte, der bliver ansvarlige for at skabe den krævede anti-fase indgangslogik til motorstyringen.
Kontrol A- og kontrol B-punkter kan udsættes for en alternerende logik for at gøre det muligt for 2-faset motor at rotere korrekt.
Polariteten af den skiftende logik bestemmer motorens rotationsretning.
Til opnåelse af en lineær hastighedsregulering på motoren kunne en PWM-form for logik implementeres på tværs af kontrol A og kontrol B-indgange, og dens driftscyklus kunne varieres for at opnå den ønskede hastighedskontrol på den tilsluttede motor.
Hvis du er i tvivl om de tekniske specifikationer eller databladet eller pinout-detaljerne på IC'et, er du altid velkommen til at kommentere nedenfor for øjeblikkelige svar.
Forrige: Trådløst termometer ved hjælp af 433 MHz RF-link ved hjælp af Arduino Næste: Universal ESC-kredsløb til BLDC- og generatormotorer