Det præsenterede 3-fasede VFD-kredsløb ( designet af mig ) kan bruges til at kontrollere hastigheden på enhver trefaset børstet vekselstrømsmotor eller endda en børsteløs vekselstrømsmotor. Ideen blev anmodet af Mr. Tom
Brug af VFD
Det foreslåede 3-fasede VFD-kredsløb kan anvendes universelt til de fleste 3-fasede vekselstrømsmotorer, hvor reguleringseffektiviteten ikke er for kritisk.
Det kan specifikt bruges til styring egern bur induktion motorhastighed med en åben sløjfetilstand og muligvis også i lukket sløjfetilstand, som vil blive diskuteret i den senere del af artiklen.
Moduler krævet til 3-faset inverter
Til design af det foreslåede 3-fasede VFD- eller variabelt frekvensomformerkreds er følgende grundlæggende kredsløbstrin i det væsentlige nødvendige:
- PWM spændingsregulator kredsløb
- 3-faset H-bro driver-kredsløb med høj side / lav side
- 3 Fasegenerator kredsløb
- Spænding til frekvensomformerkredsløb til generering af V / Hz-parameter.
Lad os lære funktionsdetaljerne i ovenstående faser ved hjælp af følgende forklaring:
Et simpelt PWM-spændingsreguleringskredsløb kan ses i nedenstående diagram:

PWM-controlleren
Jeg har allerede indarbejdet og forklaret funktionen af ovenstående PWM-generatortrin, som grundlæggende er designet til at generere et varierende PWM-output på tværs af pin3 af IC2 som svar på det potentiale, der anvendes på pin5 af den samme IC.
1K-forudindstillingen, der er vist i diagrammet, er RMS-kontrolknappen, som kan justeres passende til at opnå den ønskede proportionale mængde udgangsspænding i form af PWM'er ved pin3 i IC2 til yderligere behandling. Dette er indstillet til at producere en tilsvarende udgang, der kan svare til lysnettet 220V eller 120V AC RMS.
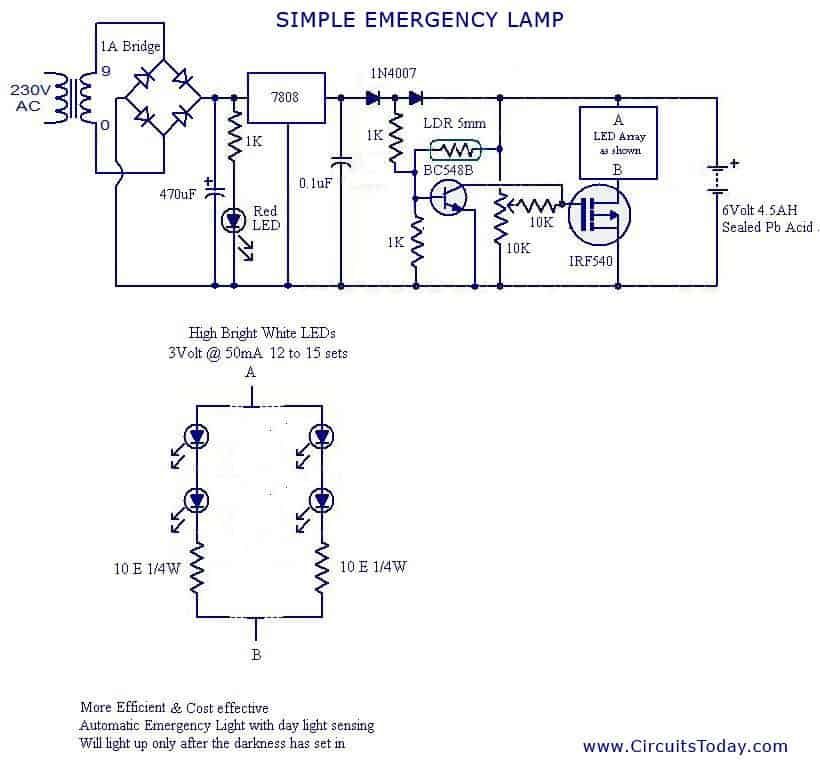
H-Bridge Driver Circuit
Det næste diagram nedenfor viser et enkelt chip H-bridge 3-faset driverkredsløb ved hjælp af IC IRS2330.
Designet ser ligetil ud, da de fleste af kompleksiteterne håndteres af chips indbyggede sofistikerede kredsløb.
Et velberegnet 3-fasesignal påføres HIN1 / 2/3 og LIN1 / 2/3-indgangene på IC gennem et 3-faset signalgenerator-trin.
Outputs af IC IRS2330 kan ses integreret med 6 mosfeter eller IGBT-bronetværk, hvis afløb er korrekt konfigureret med den motor, der skal styres.
Mosfet / IGBT-porte på den lave side er integreret med IC2-pin nr. 3 i det ovenfor diskuterede PWM-generator kredsløbstrin til initiering af PWM-injektionen i bro-mosfet-scenen. Denne regulering hjælper i sidste ende motoren med at opnå den ønskede hastighed i henhold til indstillingerne (via 1 k forudindstillet i det første diagram).

I det følgende diagram visualiserer vi det krævede 3-fasede signalgenerator kredsløb.

Konfiguration af 3-fasegeneratorkredsløbet
3-fasegeneratoren er konstrueret omkring et par CMOS-chips CD4035 og CD4009, der genererer nøjagtigt dimensionerede 3-fasesignaler på tværs af de viste pinouts.
Frekvensen af 3-fasesignalerne afhænger af de tilførte indgangsure, der skal være 6 gange det tilsigtede 3-fasesignal. Betydning, hvis den krævede 3-fasede frekvens er 50 Hz, skal indgangsuret være 50 x 6 = 300 Hz.
Det indebærer også, at de ovennævnte ure kunne varieres for at variere den effektive frekvens af driver IC, som igen ville være ansvarlig for at variere motorens driftsfrekvens.
Men da ovennævnte frekvensændring skal være automatisk som reaktion på den varierende spænding, bliver en spænding til frekvensomformer afgørende. Det næste trin diskuterer et simpelt nøjagtigt spændings- til frekvensomformerkredsløb til den krævede implementering.
Sådan oprettes et konstant V / F-forhold
For at opretholde en optimal effektivitet af motorhastighed og toque skal glideshastigheden eller rotorhastigheden typisk kontrolleres i induktionsmotorer, hvilket igen bliver muligt ved at opretholde et konstant V / Hz-forhold. Da statorens magnetiske flux altid er konstant uanset indgangsforsyningsfrekvensen, bliver rotorhastigheden let styrbar af opretholdelse af V / Hz-forholdet konstant .
I en åben sløjfetilstand kan dette gøres groft ved at opretholde forudbestemte V / Hz-forhold og implementere det manuelt. For eksempel i det første diagram kan dette gøres ved passende at justere R1 og 1K-forudindstillingen. R1 bestemmer frekvensen, og 1K justerer RMS for output, derfor ved passende justering af de to parametre kan vi håndhæve den krævede mængde V / Hz manuelt.
For at få en relativt nøjagtig kontrol af et induktionsmotormoment og -hastighed er vi nødt til at implementere en lukket sløjfestrategi, hvor sliphastighedsdataene skal føres til processorkredsløbet for en automatisk justering af V / Hz-forholdet, så dette værdi forbliver altid næsten konstant.
Implementering af feedback fra Closed Loop
Det første diagram på denne side kan passende ændres til at designe den lukkede sløjfes automatiske V / Hz-regulering som vist nedenfor:

I ovenstående figur bestemmer potentialet ved pin nr. 5 i IC2 bredden af SPWM, der genereres ved pin nr. 3 på den samme IC. SPWM genereres ved at sammenligne lysnets 12V krusningsprøve ved pin nr. 5 med trekantbølge ved pin nr. 7 i IC2, og denne føres til de lave sidemosfeter til motorstyringen.
Oprindeligt er denne SPWM indstillet til et justeret niveau (ved hjælp af 1K perset), der udløser IGBT-porte på den lave side af 3-fasebroen til initiering af rotorbevægelsen ved det specificerede nominelle hastighedsniveau.
Så snart rotorrotoren begynder at rotere, forårsager det tilsluttede omdrejningstæller med rotormekanismen en proportional yderligere mængde spænding til at udvikle sig ved pin nr. 5 i IC2, hvilket får SPWM'erne proportionalt til at blive bredere og forårsager mere spænding til motorens statorspoler. Dette medfører yderligere stigning i rotorhastigheden, hvilket forårsager mere spænding ved pin nr. 5 i IC2, og dette fortsætter, indtil SPWM-ækvivalent spænding ikke længere er i stand til at øges, og statorrotorsynkroniseringen opnår en steady-state.
Ovenstående procedure fortsætter med selvjustering gennem motorens driftsperioder.
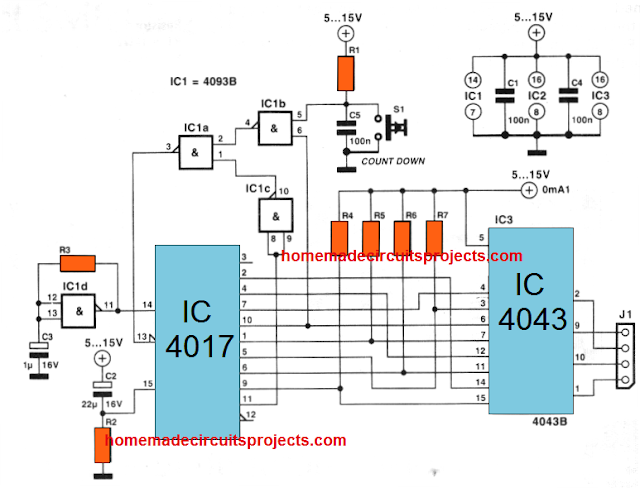
Sådan oprettes og integreres omdrejningstælleren
Et simpelt omdrejningstællerdesign kan ses i det følgende diagram, dette kan integreres med rotormekanismen, så rotationsfrekvensen er i stand til at fodre basen af BC547.

Her indsamles rotorhastighedsdataene fra en hall-effekt-sensor eller et IR-LED / sensornetværk og føres til bunden af T1.
T1 svinger ved denne frekvens og aktiverer omdrejningstællerkredsløbet lavet ved passende konfiguration af et IC 555 monostabilt kredsløb.
Outputtet fra ovenstående omdrejningstæller varierer forholdsmæssigt som reaktion på indgangsfrekvensen ved bunden af T1.
Da frekvensen stiger, stiger spændingen ved den yderste højre side D3-output også og omvendt og hjælper med at holde V / Hz-forholdet til et relativt konstant niveau.
Sådan styres hastigheden
Motorens hastighed under anvendelse af konstant V / F kan opnås ved at ændre frekvensindgangen ved IC-indgangen til urindgangen på IC 4035. Dette kan opnås ved at føre en variabel frekvens fra et IC 555 astabelt kredsløb eller et hvilket som helst standard astabelt kredsløb til urindgangen på IC 4035.
Ændring af frekvensen ændrer effektivt motorens driftsfrekvens, hvilket tilsvarende sænker sliphastigheden.
Dette registreres af omdrejningstælleren, og omdrejningstælleren reducerer proportionalt potentialet ved stift nr. 5 på IC2, hvilket igen reducerer SPWM-indholdet på motoren proportionalt, og følgelig reduceres motorens spænding, hvilket sikrer motorhastighedsvariation med den korrekte krævet V / F-forhold.
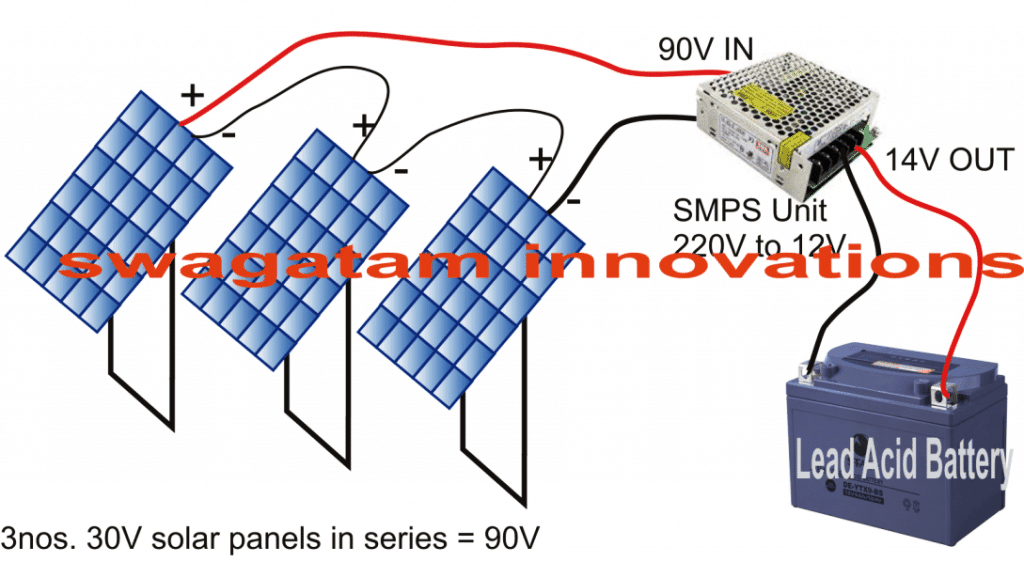
En hjemmelavet V til F konverter

I ovenstående spændings- til frekvensomformerkredsløb anvendes en IC 4060, og dens frekvensafhængige modstand påvirkes af en LED / LDR-enhed til de tilsigtede konverteringer.
LED / LDR-enheden er forseglet i en lystæt boks, og LDR er placeret over en 1 M frekvensafhængig modstand på IC.
Da LDR / LDR-responsen er ret lineær, genererer den varierende belysning af LED'en på LDR en forholdsvis varierende (stigende eller faldende) frekvens over pin3 på IC.
FSD- eller V / Hz-området på scenen kunne indstilles ved passende opsætning af 1M-modstanden eller endda C1-værdien.
LED'en er spænding afledt og belyst gennem PWM'erne fra det første PWM-kredsløbstrin. Det indebærer, at da PWM'erne varierer, vil LED-belysningen også variere, hvilket igen vil give anledning til en forholdsmæssigt stigende eller faldende frekvens ved pin3 i IC 4060 i ovenstående diagram.
Integrering af konverteren med VFD
Denne varierende frekvens fra IC 4060 skal nu simpelthen integreres med 3-fasegenerator IC CD4035 urindgang.
Ovenstående trin udgør hovedingredienserne til fremstilling af et 3-faset VFD-kredsløb.
Nu ville det være vigtigt at diskutere med hensyn til den DC BUS, der kræves til levering af IGBT-motorstyring, og opsætningsprocedurer for hele designet.
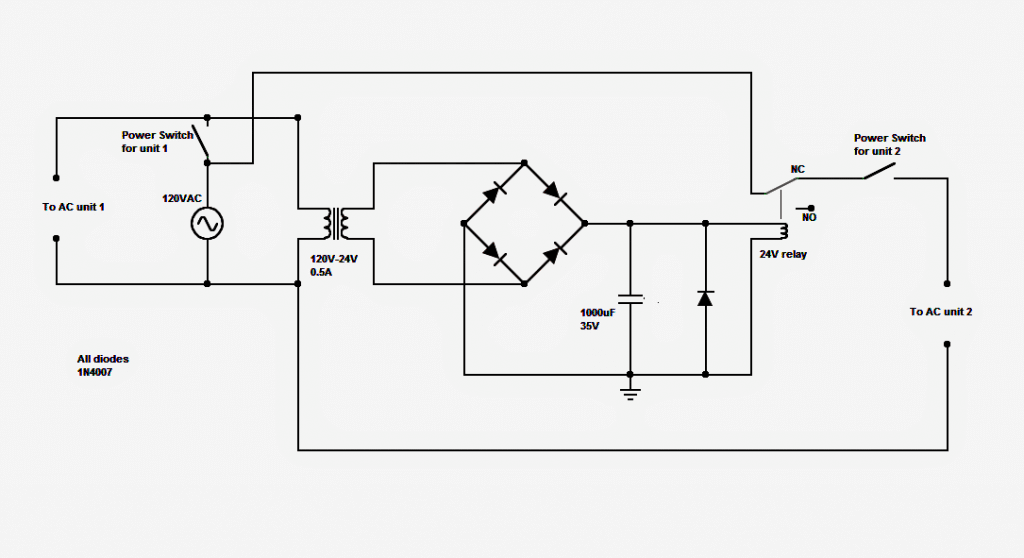
DC BUS anvendt på tværs af IGBT H-broskinnerne kan opnås ved at rette den tilgængelige 3-fasede netindgang ved hjælp af følgende kredsløbskonfiguration. IGBT DC BUS-skinnerne er forbundet på tværs af de punkter, der er angivet som 'belastning'

For en enkeltfasekilde kan afhjælpningen implementeres ved hjælp af standard 4-diode-bro-netværkskonfiguration.
Sådan oprettes det foreslåede 3-fasede VFD-kredsløb
Det kan gøres i henhold til følgende instruktioner:
Efter anvendelse af DC-busspændingen på tværs af IGBT'erne (uden tilsluttet motor) skal du justere PWM 1k-forudindstillingen, indtil spændingen over skinnerne bliver lig med de tilsigtede motorspændingsspecifikationer.
Juster derefter IC 4060 1M forudindstillet for at justere nogen af IC IRS2330-indgange til det krævede korrekte frekvensniveau i henhold til de givne motorspecifikationer.
Når ovenstående procedurer er afsluttet, kan den specificerede motor være tilsluttet og forsynet med forskellige spændingsniveauer, V / Hz-parameter og bekræftet for en automatisk V / Hz-drift over den tilsluttede motor.
Forrige: Hvordan man bygger et Grow Light Circuit Næste: Vandblødgøringskredsløb udforsket