I denne artikel vil vi forsøge at forstå, hvordan skalar kontrolalgoritme implementeres til styring af induktionsmotorhastighed med relativt ligefremme beregninger, og alligevel opnå en rimelig god lineær variabel hastighedskontrol af motoren.

Rapporter fra mange topmarkedsanalyser afslører det induktionsmotorer er de mest populære, når det kommer til håndtering af tunge industrielle motorrelaterede applikationer og job. Hovedårsagerne til induktionsmotorers popularitet skyldes grundlæggende dens høje grad af robusthed, større pålidelighed med hensyn til slidproblemer og forholdsvis høj funktionel effektivitet.
Når det er sagt, har induktionsmotorer en typisk ulempe, da disse ikke er lette at kontrollere med almindelige konventionelle metoder. Styring af induktionsmotorer er relativt krævende på grund af dens ret komplekse matematiske konfiguration, som primært inkluderer:
- Ikke-lineært svar ved kernemætning
- Ustabilitet i form af svingninger på grund af varierende temperatur i viklingen.
På grund af disse kritiske aspekter kræver implementering af induktionsmotorstyring optimalt en grundigt beregnet algoritme med høj pålidelighed, for eksempel ved hjælp af en 'vektorstyring' -metode og derudover ved hjælp af et mikrocontrollerbaseret behandlingssystem.
Forståelse af implementering af Scalar Control
Imidlertid findes der en anden metode, der kan anvendes til implementering af induktionsmotorstyring ved hjælp af en meget lettere konfiguration, det er den skalære kontrol, der indeholder ikke-vektordrevsteknikker.
Det er faktisk muligt at aktivere en AC-induktionsmotor i en stabil tilstand ved at betjene den med en ligetil spændingsfeedback og strømstyrede systemer.
I denne skalarmetode kan skalarvariablen justeres, når den rigtige værdi opnås enten ved at eksperimentere praktisk eller gennem egnede formler og beregninger.
Dernæst kan denne måling bruges til at implementere motorstyring via et åbent kredsløbskredsløb eller gennem en lukket feedback-loop-topologi.
Selvom den skalære kontrolmetode lover en rimelig god steady-state-resultat på motoren, er dens forbigående respons muligvis ikke op til mærket.
Sådan fungerer induktionsmotorer
Ordet 'induktion' i induktionsmotorer henviser til den unikke måde, hvorpå den fungerer, hvor magnetisering af rotoren ved hjælp af statorviklingen bliver et afgørende aspekt af operationen.
Når vekselstrøm påføres over statorviklingen, interagerer det oscillerende magnetfelt fra statorviklingen med rotorarmaturet og skaber et nyt magnetfelt på rotoren, som igen reagerer med statormagnetfeltet, hvilket inducerer en stor mængde drejningsmoment på rotoren . Dette drejningsmoment giver den krævede effektive mekaniske ydelse til maskinen.
Hvad er 3-fase egerninduktionsmotor
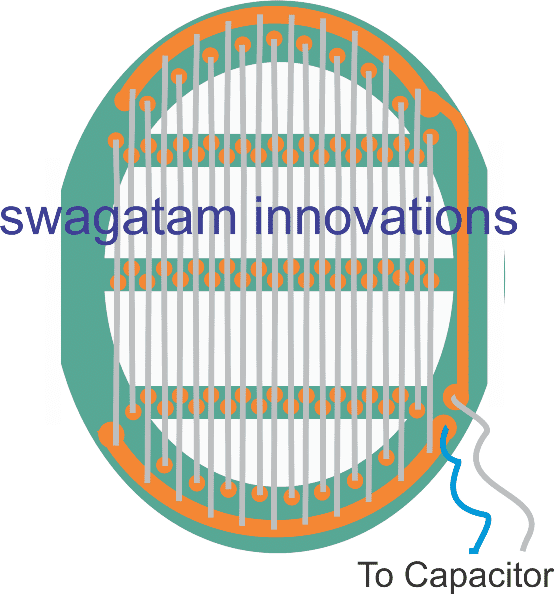
Det er den mest populære variant af induktionsmotorer og bruges i vid udstrækning i industrielle applikationer. I en egerninduktionsmotor bærer rotoren en række stanglignende ledere, der omgiver rotorens akse, der præsenterer en unik burlignende struktur og dermed navnet 'egernbur'.
Disse stænger, der er skæve i form og løber rundt om rotoraksen, er fastgjort med tykke og robuste metalringe i enderne af stængerne. Disse metalringe hjælper ikke kun med at sikre stængerne på plads, men håndhæver også en vigtig elektrisk kortslutning over stængerne.
Når statorviklingen anvendes med en sekventerende 3-faset sinusformet vekselstrøm, begynder det resulterende magnetfelt også at bevæge sig med samme hastighed som 3-fasens stator sinusfrekvens (ωs).
Da egernburens rotorsamling holdes inde i statorviklingen, reagerer det ovennævnte alternerende 3-fasemagnetiske felt fra statorviklingen med rotorenheden, der inducerer et ækvivalent magnetfelt på stangledere i buraggregatet.
Dette tvinger et sekundært magnetfelt til at opbygge sig omkring rotorbjælkerne, og følgelig er dette nye magnetfelt tvunget til at interagere med statorfeltet, hvilket tvinger et rotationsmoment på rotoren, som forsøger at følge retningen af statormagnetfeltet.

I processen forsøger rotorhastigheden at nå statorens frekvenshastighed, og når den nærmer sig statorsynkrone magnetfelthastighed, begynder den relative hastighedsforskel e mellem statorfrekvenshastigheden og rotorens rotationshastighed at falde, hvilket medfører et fald i magnetisk vekselvirkning af rotorens magnetfelt over statorens magnetfelt, hvilket til sidst mindsker drejningsmomentet på rotoren og den tilsvarende effekt fra rotoren.
Dette fører til en minimal effekt på rotoren, og ved denne hastighed siges det, at rotoren har fået en steady-state, hvor belastningen på rotoren er ækvivalent og matcher drejningsmomentet på rotoren.
Arbejdet med en induktionsmotor som reaktion på en belastning kan opsummeres som forklaret nedenfor:
Da det bliver obligatorisk at opretholde en fin forskel mellem rotorhastigheden og den indre statorfrekvenshastighed, roterer rotorhastigheden, som faktisk håndterer belastningen, med en lidt reduceret hastighed end statorfrekvenshastigheden. Omvendt, hvis vi antager, at statoren påføres med 50Hz 3-fasetilførsel, vil vinkelhastigheden for denne 50Hz-frekvens over statorviklingen altid være lidt højere end responsen i rotorens rotationshastighed, dette opretholdes iboende for at sikre en optimal tænd for rotoren.
Hvad er slip i induktionsmotor
Den relative forskel mellem statorens vinkelhastighed på frekvensen og rotorens responsive rotationshastighed betegnes som 'slip'. Slippen skal være til stede selv i situationer, hvor motoren betjenes med en feltorienteret strategi.
Da rotorakslen i induktionsmotorer ikke er afhængig af nogen ekstern excitation for dens rotation, kan den fungere uden konventionelle glidringe eller børster, der sikrer praktisk talt nul slid, høj effektivitet og alligevel billig med vedligeholdelse.
Momentfaktoren i disse motorer bestemmes af vinklen, der er etableret mellem de magnetiske fluxer af stator og rotoren.
Når man ser på diagrammet nedenfor, kan vi se, at rotorens hastighed er tildelt som Ω, og frekvenserne på tværs af stator og rotor bestemmes af parameteren 's' eller slip, præsenteret med formlen:
s = ( ω s - ω r ) / ω s
I ovenstående udtryk er s 'slip', der udviser forskellen mellem statorens synkrone frekvenshastighed og den faktiske motorhastighed, der er udviklet på rotorakslen.

Forståelse af Scalar Speed Control Theory
I induktionsmotorstyringskoncepter hvor Teknisk V / Hz er anvendt, implementeres hastighedsstyringen ved at justere statorspændingen i forhold til frekvensen, således at luftgabstrømmen aldrig er i stand til at afvige ud over det forventede interval for steady-state, med andre ord, den opretholdes inden for denne estimerede steady-state værdi, og derfor kaldes det også skalar kontrol metode, da teknikken i høj grad afhænger af steady-state dynamikken til styring af motorhastigheden.
Vi kan forstå funktionen af dette koncept ved at henvise til følgende figur, der viser det forenklede skema for en skalar kontrolteknik. I opsætningen antages det, at statormodstanden (Rs) er nul, mens statorlækageinduktansen (LI'er) påvirkes af rotorlækage og magnetiseringsinduktans (LIr). Den (LIr), der faktisk skildrer størrelsen af luftspaltfluxen, kan ses som blevet skubbet før den samlede lækageinduktans (Ll = Lls + Llr).

På grund af dette får luftgabstrømmen, der er skabt af magnetiseringsstrømmen, en omtrentlig værdi tæt på statorens frekvensforhold. Således kan faseudtrykket til en steady-state-vurdering skrives som følger:

For induktionsmotorer, der kan køre ved deres lineære magnetiske regioner, vil Lm ikke ændre sig og forblive konstant, i sådanne tilfælde kan ovenstående ligning udtrykkes som:

Hvor V og Λ er henholdsvis statorspændingsværdierne og statorfluxen, mens Ṽ repræsenterer faseparameteren i designet.
Det sidste udtryk ovenfor forklarer tydeligt, at så længe V / f-forholdet holdes konstant uanset ændring i indgangsfrekvensen (f), forbliver fluxen også konstant, hvilket gør det muligt for token at fungere uden at være afhængig af forsyningsspændingsfrekvensen . Det indebærer, at hvis ΛM holdes på et konstant niveau, ville forholdet Vs / ƒ også blive gengivet med en konstant relevant hastighed. Derfor, når motorhastigheden øges, skal spændingen over statorviklingen også øges forholdsmæssigt, således at en konstant Vs / f kunne opretholdes.
Her er slip imidlertid funktionen af belastningen, der er fastgjort til motoren, og den synkrone frekvenshastighed viser ikke motorens reelle hastighed.
I mangel af et belastningsmoment på rotoren, kan den resulterende glidning være ubetydelig lille, så motoren kan nå tæt på synkrone hastigheder.
Derfor har en grundlæggende Vs / f- eller en V / Hz-konfiguration normalt ikke evnen til at implementere nøjagtig hastighedskontrol af en induktionsmotor, når motoren er fastgjort med et belastningsmoment. Dog kan en glidekompensation ganske let indføres i systemet sammen med hastighedsmåling.
Den nedenfor viste grafiske gengivelse viser tydeligt en hastighedsføler inden for et lukket kredsløb V / Hz-system.

I praktiske implementeringer kan forholdet mellem statorspænding og frekvens typisk afhænge af selve vurderingen af disse parametre.
Analyserer V / Hz hastighedskontrol
En standard V / Hz-analyse kan ses i den følgende figur.

Grundlæggende finder du 3 hastighedsvalgområder inden for en V / Hz-profil, hvilket kan forstås fra følgende punkter:
- der henvises til figur 4 når afskæringsfrekvensen er i området 0-fc, bliver en spændingsindgang essentiel, som udvikler et potentielt fald over statorviklingen, og dette spændingsfald kan ikke ignoreres og skal kompenseres ved at øge forsyningsspændingen Vs. Dette indikerer, at V / Hz-forholdsprofilen i denne region ikke er en lineær funktion. Vi kan analytisk evaluere afskæringsfrekvensen fc for passende statorspændinger med hjælp fra det ækvivalente kredsløb med steady state, der har Rs ≠ 0.
- I region fc-r (nominel) Hz er den i stand til at udføre et konstant Vs / Hz-forhold, i dette tilfælde betyder forholdets hældning mængden af luftgabstrømmen .
- Ved regionen ud over f (nominel), der kører ved højere frekvenser, bliver det umuligt at udføre Vs / f-forholdet ved konstant hastighed, da statorspændingen i denne position har tendens til at blive begrænset ved f (nominel) -værdien. Dette sker for at sikre, at statorviklingen ikke udsættes for isolationsnedbrud. På grund af denne situation har den resulterende luftspaltstrøm tendens til at blive kompromitteret og reduceret, hvilket fører til et tilsvarende faldende rotormoment. Denne driftsfase i induktionsmotorer betegnes som “Feltsvækkende region” . For at forhindre denne slags situation overholdes normalt ikke en konstant V / Hz-regel i disse frekvensområder.
På grund af tilstedeværelsen af en konstant statormagnetisk flux uanset frekvensændring i staorviklingen, skal token på rotoren nu kun stole på glidehastigheden, denne effekt kan ses i figur 5 over
Med passende glideshastighedsregulering kunne hastigheden på en induktionsmotor styres effektivt sammen med drejningsmomentet på rotorbelastningen ved at anvende et konstant V / Hz-princip.
Uanset om det er en åben eller en lukket loop-hastighedskontroltilstand, kan begge implementeres ved hjælp af den konstante V / Hz-regel.
En styringstilstand med åben sløjfe kunne anvendes i applikationer, hvor nøjagtigheden af hastighedsregulering muligvis ikke er en vigtig faktor, såsom i HVAC-enheder eller blæser- og blæserlignende apparater. I sådanne tilfælde findes frekvensen til belastningen ved at henvise til det krævede hastighedsniveau for motoren, og rotorhastigheden forventes omtrent at følge den øjeblikkelige synkronhastighed. Enhver form for uoverensstemmelse i hastigheden som følge af motorens glidning ignoreres generelt og accepteres i sådanne applikationer.
Reference: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
Tidligere: Forståelse af pull-up- og pull-down-modstande med diagrammer og formler Næste: 18650 2600mAh batteri datablad og arbejde