I dette projekt skal vi lære at lave et simpelt unipolært trinmotordriverkredsløb ved hjælp af 555 timer IC. Bortset fra 555 timer har vi også brug for IC CD 4017, som er en tiårs-tæller IC.
Af Ankit Negi
Enhver unipolar motor kan tilsluttes dette kredsløb for at udføre en specifik opgave, selvom du først skal foretage nogle små ændringer.
Trinmotorens hastighed kan styres fra et potentiometer forbundet mellem afladning og tærskel pin af 555 timer .
Stepper Motor Basics
Trinmotorer bruges i områder, hvor der kræves en bestemt rotationsmængde, som ikke kan opnås ved hjælp af almindelige DC-motorer. En typisk anvendelse af trinmotor er i en 3D PRINTER. Du finder to typer populær trinmotor: UNIPOLAR og BIPOLAR.
Som navnet antyder, indeholder enpolet trinmotor viklinger med fælles ledning, som let kan aktiveres en efter en.
Mens bipolar trinmotor ikke har en fælles terminal mellem spoler, som den ikke kan drives ved blot at bruge det foreslåede kredsløb. For at køre bipolar stepmotor har vi brug for et h-bridge kredsløb.
KOMPONENTER:
1. 555 TIMER IC

2. CD 4017 IC

3. MODSTANDE 4.7K, 1K


4. POTENTIOMETER 220K

5. 1 uf KAPACITOR

6. 4 DIODER 1N4007

7. 4 TRANSISTORS 2N2222

8. ENPOLÆR TRINMOTOR

9. DC-STRØMKILDE
FORMÅL MED 555 TIMER:
555 timer kræves her for at generere urimpulser med en bestemt frekvens (kan varieres ved hjælp af 220k pot), der bestemmer trinmotorens hastighed.
IC 555 Pinout detaljer

FORMÅL MED CD4017:
Som allerede nævnt ovenfor er det et tæller-IC, dvs. det kan tælle op til 10 urimpulser. Hvad der gør denne IC speciel er, at den har sin egen indbyggede dekoder. På grund af hvilket du ikke behøver at tilføje en ekstra IC for at afkode binære tal.
4017 tæller op til 10 urimpulser fra 555 timer og giver høj output svarende til hver urpuls en efter en fra sine 10 outputstifter. Ad gangen er kun en pin høj.
FORMÅLET MED TRANSISTORS:
Der er to formål med transistor her:
1. Transistorer fungerer som afbrydere her og aktiverer således en spole ad gangen.
2. Transistorer gør det muligt for høj strøm at passere gennem dem og derefter motoren, hvilket udelukker 555 timer fuldstændigt, da den kan levere meget lidt strøm.
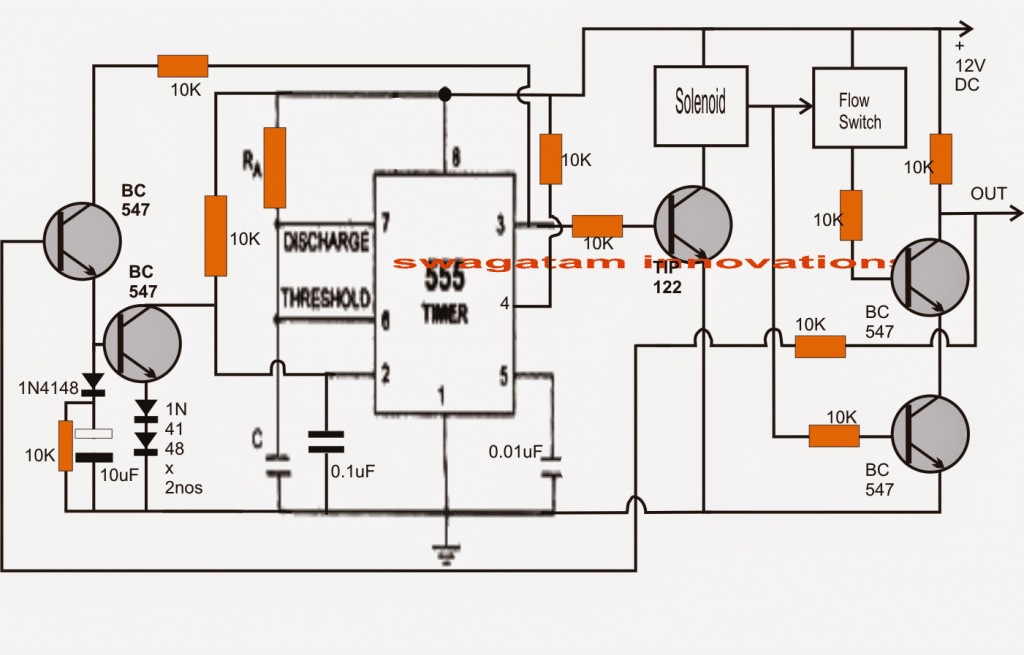
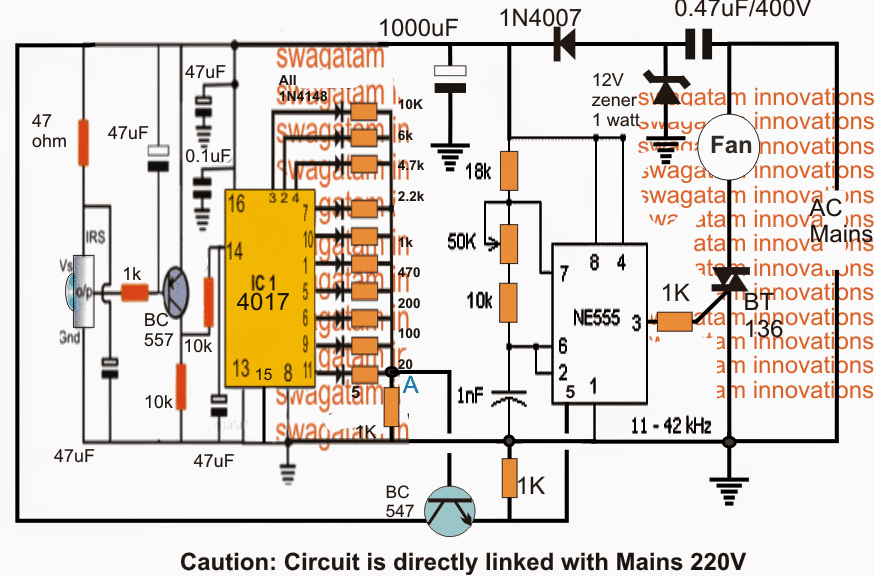
KREDSLØBSDIAGRAM:

Foretag forbindelser som vist på figuren.
1. Tilslut pin 3 eller output pin på 555 timer til pin 14 (clock pin) på IC 4017.
2. Tilslut aktiveringsstift eller 13. pin på 4017 til jord.
3. Tilslut ben 3,2,4,7 en efter en til henholdsvis transistorer 1,2,3,4.
4. Forbind den 10. og 15. pin til jorden gennem en 1k modstand.
5. Forbind den almindelige ledning af trinmotoren til den positive forsyning.
6. Tilslut andre ledninger på trinmotoren på en sådan måde, at spoler får strøm én efter én for at fuldføre en fuld omdrejning korrekt (du kan se på databladet over motoren leveret af producenten)
HVORFOR ER UDGANG PIN 10 AF IC 4017 TILSLUTTET TIL DENNE PIN 15 (NULSTIL PIN)?
Som allerede nævnt ovenfor tæller 4017 urimpulser en efter en op til 10. urpuls og giver højt output på outputben i overensstemmelse hermed, hver output pin går højt.
Dette medfører en vis forsinkelse i motorens rotation, som er unødvendig. Da vi kun har brug for de første fire ben for en komplet omdrejning af motoren eller de første fire decimaltællinger fra o til 3, ben nr. 10 er forbundet med pin15, så IC-nulstilling efter 4. række nulstilles og tælling starter fra begyndelsen igen. Dette sikrer ingen afbrydelse af motorens rotation.
ARBEJDER:
Efter tilslutning korrekt, hvis du tænder for kredsløbsmotoren, vil den begynde at rotere i trin. 555 timer producerer urimpulser afhængigt af værdierne på modstand, potentiometer og kondensator.
Hvis du ændrer værdien af en af disse tre komponenters frekvenser, ændres urpulsen.
Disse urimpulser gives til IC CD 4017, som derefter tæller urimpulserne en efter en og giver 1 som output til henholdsvis pin nr. 3,2,4,7 og gentager denne proces kontinuerligt.
Da transistor Q1 er forbundet til pin 3, tænder den først derefter transistor Q2 efterfulgt af Q3 og Q4. Men når en transistor er tændt, skal den forblive slukket.
Når Q1 er tændt, fungerer det som en lukket kontakt, og strøm strømmer gennem fælles ledning til ledning 1 og derefter til jord gennem transistor Q1.
Dette aktiverer spole 1, og motoren roterer i en vis vinkel, som afhænger af urfrekvensen. Derefter sker det samme med Q2, som aktiverer spole 2 efterfulgt af spole 3 og spole 4. Således opnås en fuldstændig omdrejning.
Når potentiometeret drejes:
Lad os sige, at grytens oprindelige position er sådan, at der er maksimal modstand (220k) mellem afladning og tærskelstift. Formlen for frekvensen af udgangspulsimpulsen er:
F = 1,44 / (R1 + 2R2) C1
Det fremgår klart af formlen, at frekvensen af urimpulser falder, når værdien af R2 øges. Således når R2 eller potts værdi er maksimal, er frekvensen minimum, som IC 4017 tæller langsommere og giver mere forsinket output.
Efterhånden som værdien af modstand R2 falder, øges frekvensen, hvilket medfører minimal forsinkelse mellem udgangene fra IC 4017. Og dermed roterer trinmotor hurtigere.
Således bestemmer værdien af potentiometer trinmotorens hastighed.
SIMULERINGSVIDEO:
Her kan du tydeligt se, hvordan motorens hastighed varierer med modstand R2. Dens værdi sænkes først og øges derefter, hvilket igen først øges og derefter reducerer trinmotorens hastighed.
Forrige: Hvordan krumtapelygter fungerer Næste: Arduino omdrejningstællerkredsløb til præcise aflæsninger