En elektrisk maskine der konverterer elektrisk energi til mekanisk energi kaldes en elektrisk motor. Først og fremmest elektrisk motor er en simpel elektrostatisk enhed oprettet af den skotske munk Andrew Gordon i 1740'erne. Men i 1821 demonstrerede Michael Faraday omdannelsen af elektrisk energi til mekanisk energi.
Elektriske motorer er primært klassificeret i to kategorier: AC motorer og DC-motorer . Igen er hver kategori opdelt i mange typer. Mange belastninger såsom mixer, kværn, blæsere osv., Hyppigst anvendte husholdningsapparater, hvor vi kan finde forskellige typer motorer, og disse kan betjenes ved forskellige hastigheder med hastighedsregulering af motorerne. I denne artikel skal vi diskutere en af hovedtyperne af jævnstrømsmotorer, nemlig Trinmotor og dens kontrol ved hjælp af mikrokontrolleren.
Stepper Motor
En synkron og børsteløs DC-motor der omdanner elektriske impulser til mekaniske bevægelser og således roterer trinvis med en bestemt vinkel mellem hvert trin for at fuldføre en fuld rotation kaldes trinmotor. Vinklen mellem trinmotorens rotationstrin betegnes som motorens trinvinkel.

Stepper Motor
Trinmotorer klassificeres i to typer efter deres vikling: Unipolære trinmotorer og bipolære trinmotorer. Den unipolære trinmotor bruges ofte i mange applikationer på grund af dens lette betjening sammenlignet med den bipolære trinmotor. Men der er forskellige typer trinmotorer såsom permanentmagnet-trinmotor, trinløs motor med variabel modstand og hybridmotor.
Stepper Motor Control
Trinmotoren kan styres med forskellige teknikker, men her diskuteres trinmotorstyringen ved hjælp af en Atmega mikrokontroller . 89C51 er en mikrokontroller af 8051 mikrokontroller familie .

Blokdiagram over trinmotorkontrol
Blokdiagrammet for en stepper motor kontrol ved hjælp af en 8051 mikrokontroller er vist i figuren med Strømforsyning , mikrocontroller, trinmotor og kontrolafbryderblokke.
2 metoder til at designe trinmotorkontrolkredsløb
Stepper motor controller er designet ved hjælp af 8051 mikrokontroller og koblingskredsløb til styring af trinmotorens hastighed. Kontrolafbryderkredsløbet kan designes ved hjælp af transistorafbrydere eller ved hjælp af stepper motor controller IC såsom ULN2003 i stedet for transistorer.
1. Styr kredsløb ved hjælp af trinmotorcontroller IC
Den unipolære trinmotor kan drejes ved at aktivere statorspolerne i en sekvens. Sekvensen af disse spændingssignaler, der påføres på tværs af motorspolerne eller ledningerne, er nok til at drive motoren, og der kræves derfor intet førerkredsløb til styring af strømretningen i statorspolerne.

Stepper Motor Control ved hjælp af IC
Den tofasede trinmotor består af fire endeledninger, der er forbundet med spolerne, og to almindelige ledninger, der er forbundet med de to ender, danner to faser. De fælles punkter og slutpunkter i de to faser er forbundet til henholdsvis jorden eller Vcc og mikrokontrolstifter. For at rotere motoren skal slutpunkterne for de to faser få strøm. Primært påføres en spænding til fase 1's første slutpunkt, og yderligere spænding påføres fase 2's første slutpunkt og så videre.
Trinmotoren kan betjenes i forskellige tilstande, såsom Wave Drive Stepping Mode, Full Drive Stepping Mode og Half Drive Stepping Mode.
Wave Drive Stepping Mode
Ved at gentage ovenstående rækkefølge kan motoren drejes i bølgedrev-trin-tilstand enten med eller mod uret baseret på valg af slutpunkter. Tabellen nedenfor viser signalfasesekvensen for bølgedrev-trin-tilstand.


Wave Drive Stepping Mode
Stepping Mode til fuld drev
Ved at aktivere de to slutpunkter i forskellige faser samtidigt opnås en fuld-drive-step-mode. Tabellen viser signalfasesekvensen for fuld-drev-trin-tilstand.


Stepping Mode til fuld drev
Half Drive Stepping Mode
Kombinationen af trinene i bølgetilstanden og fuld-drev-trin-til-stand opnår en halv-kørsel-trin-tilstand. I denne tilstand er trinvinklen således delt i halvdelen. Tabellen viser signalfasesekvensen for en halv-trin-trin-tilstand.


Half Drive Stepping Mode
Generelt afhænger trinvinklen af trinmotorens opløsning. Trinets størrelse og omdrejningsretningen er direkte proportional med antallet og rækkefølgen af indgangssekvensen. Akselens rotationshastighed afhænger af frekvensen af indgangssekvensen. Momentet og antallet af magneter magnetiseret ad gangen er proportionale.
Trinmotoren kræver 60 mA strøm, men den maksimale strømværdi for Atmega mikrokontroller AT89C51 er 50 mA. Så en step-motor-controller ICisused til at interface stepmotoren med mikrocontrolleren til overførsel af signalerne.
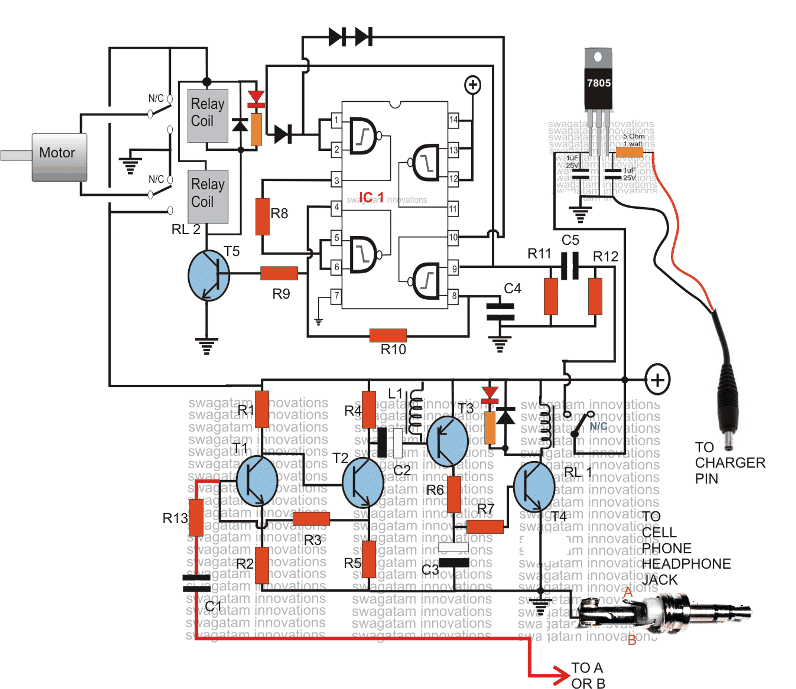
2. Kontrolkontaktkredsløb ved hjælp af transistorer
Strømforsyningen til kredsløbet kan gives ved at træde ned spændingen fra 230V til 7,5V ved hjælp af en nedadgående transformer og derefter udbedring af en broensretter med dioder . Denne udbedrede udgang føres til en filterkondensator og føres derefter gennem spændingsregulatoren. Den 5V regulerede udgang fås fra spændingsregulatoren. Reset pin9 er forbundet mellem kondensatoren og modstanden.

Stepper Motor Control Circuit ved hjælp af transistor
Generelt består trinmotoren af fire spoler som vist på figuren. Så for at køre motoren kræves der fire motordriverkredsløb. I stedet for at bruge trinmotorkontrolleren IC til at drive motoren, er fire transistorer forbundet som driverkredsløb ved henholdsvis 21, 22, 23 og 24 ben på mikrocontrolleren.
Hvis transistorer starter ledning, dannes der et magnetfelt omkring spolen, der forårsager rotation af motoren. Trinmotorhastigheden er direkte proportional med indgangspulsfrekvensen. En krystaloscillator er forbundet til benene 18 og 19 for at tilvejebringe mikrocontroller-urfrekvens på ca. 11,019 MHz.
Udførelsestiden for enhver instruktion kan beregnes ved hjælp af nedenstående formel
Tid = ((C * 12)) / f
Hvor C = antal cyklusser
Og F = krystalfrekvens
Et af det applikationsbaserede kredsløb, der bruger en trinmotor til roterende solpanel, er beskrevet nedenfor.
Stepper Motor Control ved hjælp af programmeret 8051 Microcontroller
Sun Tracking Solar Panel-projekt er beregnet til at generere den maksimale mængde energi ved automatisk at justere solpanelet. I dette projekt er en stepmotor styret af en programmeret mikrokontroller af 8051-familien tilsluttet solpanelet for at opretholde solpanelernes ansigt altid vinkelret på solen.

Stepper Motor Control ved hjælp af Microcontroller af Edgefxkits.com
Det programmeret mikrokontroller genererer trinvise elektriske impulser med regelmæssige intervaller til trinmotoren til rotation af solpanelet. Driver IC bruges til at køre trinmotoren, da controlleren ikke er i stand til at levere motorens effektbehov.
Efterlad dine forslag, feedback og forespørgsler ved at sende kommentarer i kommentarfeltet nedenfor. Vi vil gøre vores bedste for at hjælpe dig teknisk med hensyn til denne artikel og udvikling af elektriske og elektroniske projekter ved hjælp af trinmotor.