Artiklen diskuterer en simpel infrarød kontrolleret ventilatorregulator eller lysdæmperkredsløb ved hjælp af almindelige dele såsom en 4017 IC og en 555 IC.
Kredsløb
Der henvises til det viste fjernstyrede blæserdæmperkredsløb, tre hovedtrin kan ses med: det infrarøde signalfølerstrin ved hjælp af IC TSOP1738 , Johnsons tiårs tæller, sequencer ved hjælp af IC 4017 og et PWM-processortrin ved hjælp af IC 555.

De forskellige operationer involveret i kredsløbet kan forstås ved hjælp af følgende punkter:
Når en infrarød stråle er fokuseret på sensoren, frembringer sensoren en lav logik som reaktion på dette, hvilket igen får PNP BC557 til at lede.
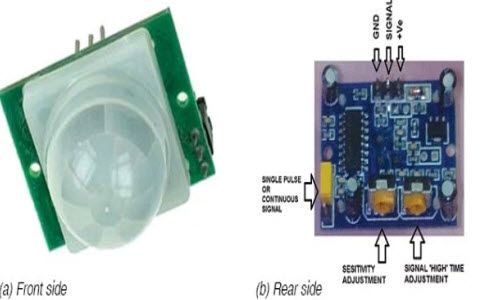
Brug af sensor TSOP1738
Sensoren, der bruges her, er en TSOP1738, du kan lære mere om det i dette simpel artikel om IR-fjernbetjening
Ledningen af BC557-transistoren som reaktion på IR-strålen forbinder den positive forsyning til pin14 i IC 4017, som accepteres som en klokimpuls af IC'en.
Denne urpuls oversættes til et enkelt sekventielt hop af en høj logik fra den eksisterende pinout til den næste efterfølgende pinout i sekvensen på tværs af de viste udgange af IC 4017.
Denne sekventielle overførsel eller skift af en høj logisk puls fra en pinout til den næste over hele udgange fra pin nr. 3 til pin nr. 10 og tilbage udføres som svar på hver øjeblikkelig stråle, der er fokuseret på IR-sensoren af IR-fjernbetjeningen.
Brug af IC 4017 til styring af spændingsdeler
Vi kan se, at IC 4017-udgangene har et sæt nøjagtigt beregnede modstande, hvis ydre frie ender er kortsluttet og forbundet til jorden via en 1K-modstand.
Ovenstående konfiguration danner en resistiv potentialdeler, der genererer en sekventiel stigende eller faldende potentialniveauer ved knudepunktet 'A' som reaktion på forskydningen af de høje logikker på tværs af output som beskrevet i ovenstående forklaring.
Dette varierende potentiale afsluttes ved basen af en NPN-transistor, hvis emitter kan ses forbundet med pin nr. 5 i IC 555, der er konfigureret som en højfrekvent astabel.
Brug af IC 555 som PWM-generator
555-scenen fungerer stort set som en PWM-generator, der varierer proportionalt, da dens pin 5-potentiale varieres. De forskellige PWM'er oprettes ved dens pin 3.
Som standard er pin nr. 5 forbundet med en 1K modstand til jord, hvilket sikrer, at når der ikke er nogen spænding eller minimumsspænding ved pin nr. 5 resulterer i en ekstremt smal PWM ved sin pin # 3 og som potentialet eller spændingen ved sin pin # 5 øges, får PWM'erne også bredde proportionalt. Bredden er maksimal, når potentialet ved pin nr. 5 når 2/3 af Vcc for sin pin nr. 4/8.
Nu tilsyneladende, når udgangene fra IC 4017 skifter, hvilket skaber en varierende spænding ved basen af NPN, overføres en tilsvarende mængde af varierende spænding over pin nr. 5 på IC 555, som igen konverteres til en tilsvarende skiftende PWM på tværs af pin Nr. 3 på IC.
Da IC-stift nr. 3 er forbundet til en triac-port, påvirkes ledningen af triac proportionalt fra høj til lav og omvendt som svar på de skiftende PWM'er over dens port.
Dette konverteres effektivt til en ønsket hastighedsregulering eller en passende regulering af den tilsluttede ventilator på tværs af triacs MT1 og AC-netindgangen.
Således bliver ventilatorens hastighed justerbar fra hurtig til langsom og omvendt som reaktion på de infrarøde IR-stråler, der skiftes til den tilknyttede IR-sensor i kredsløbet.
Sådan opsættes kredsløbet.
Det kan gøres ved hjælp af følgende trin:
Først skal emitteren til BC547-transistoren være afbrudt med pin nr. 5 på IC555.
Nu kan de to faser (IC 4017 og IC 555) antages at være isoleret fra hinanden.
Kontroller først IC 555-trinnet på følgende måde:
Frakobling af 1K-modstanden over pin nr. 5 og jorden skal øge ventilatorens hastighed til maksimum, og tilslutning af den skal reducere den til minimum.
Ovenstående bekræfter den korrekte funktion af IC 555 PWM-scenen.
Forudindstillet 50k-indstilling er ikke afgørende og kan indstilles til omtrent midten af det forudindstillede interval.
Imidlertid kunne kondensatoren 1nF eksperimenteres for at få de bedst mulige resultater. Højere værdier op til 10uF kunne afprøves, og resultaterne blev overvåget for at opnå den mest gunstige regulering af blæserhastigheden.
Dernæst skal vi kontrollere, om IC 4017-outputknudepunktet ved 'A' skaber en varierende spænding fra 1V til 10V som reaktion på hvert tryk på IR-fjernstrålen over kredsløbets IR-sensor.
Hvis ovenstående betingelse er opfyldt, kan vi antage, at scenen fungerer korrekt, og nu kan emitteren til BC547 integreres med pin nr. 5 på IC555 til den endelige test af ventilatorhastighedsreguleringen ved hjælp af et IR-fjernbetjening.
Fjernhåndsættet kan være enhver tv-fjernbetjening, som vi normalt bruger i vores hjem.
Hvis ovenstående design ikke fungerer problemfrit med en tilsluttet ventilator, kan det være nødvendigt at gennemgå en lille ændring for at forbedre resultaterne som vist nedenfor:

Kredsløbet tager hjælp fra et MOC3031 triac-førertrin til at håndhæve en problemfri og ren blæserstyring gennem fjernbetjeningen.
Testanalyse
Ved testning af ovenstående kredsløb var resultaterne ikke helt tilfredsstillende, da blæseren ikke kunne styres op til den laveste grænse, og den viste en vis vibration.
Analysering af designet afslørede, at anvendelsen af PWM på triac forårsagede problemet, da triacs ikke reagerer godt på DC PWM'er, snarere viser forbedrede reaktioner på AC-faseskæring som brugt i lysdæmpere
Brug af fasekontrol i stedet for PWM
Kredsløbet, der diskuteres i denne artikel, eliminerer PWM-ideen til ventilatorens dæmpningskontrol, men bruger i stedet få triacs med lav effekt til sekventiel implementering af dæmpningen eller hastighedseffekten på den tilsluttede ventilatormotor.
Det komplette design til det foreslåede fjernstyrede blæserdæmperkredsløb kan ses nedenfor:
Kredsløbsdiagram

Bemærk: de 4 SCR'er er forkert repræsenteret som SCR BT169, disse skal erstattes med triacs, såsom BCR1AM-8P triacs, eller enhver anden lignende triac vil også gøre.
Hvordan det virker
Med henvisning til diagrammet ovenfor kan vi se to kredsløbet konfigureret over et par forskellige trin.
Den højre side af diagrammet er konfigureret som en standard lysdæmper eller blæserdæmperkredsløb , undtagen en ændring, som kan ses nær dens sædvanlige grydesektion, hvor den er blevet erstattet med fire triacer med fire separate modstande ved deres MT2, arrangeret med stigende værdier.
Venstre sidetrin, der omfatter IC 4017, er kablet som en 4-trins sekventiel logikgenerator, udløst af en infrarød sensorenhed, som danner IR-modtageren til modtagelse af koblingstriggerne fra en håndholdt IR-fjernbetjeningsenhed.
Den alternative eksterne IR-stråler fra IR-senderen får IRS til at generere en skiftende puls ved pin # 14 i IC 4017, som igen konverterer pulsen til en sekventielt skiftende logisk højpuls over sin pin # 3 til pin # 10, hvorefter den nulstilles tilbage til pin # 3 via pin # 1/15 interaktion.
Ovenstående pinouts, som er ansvarlige for at generere en sekventielt vandrende logisk højpuls, er serielt forbundet med portene A, B, C, D til de angivne triacs.
Da modstandene forbundet med anoderne i triacerne bliver de afgørende komponenter for ventilatorhastighedsbegrænsningen, indebærer, at ved sekventielt at skifte triacs frem og tilbage, kan ventilatorens hastighed øges eller formindskes forholdsmæssigt i 4 diskrete trin, afhængigt af værdierne på R4 ---- R8.
Derfor, når der trykkes på fjernbetjeningsknappen, udløser IC 4017 pinouts den tilsvarende triac, som igen forbinder sin anodemodstand med lysdæmper triac / diac-konfigurationen og udfører den relevante mængde blæserhastighed.
I det foreslåede fjernstyrede blæserdæmperkredsløb er vist 4 triacs til fremstilling af en 4-trins hastighedskontrol, men 10 sådanne triacs kunne implementeres med alle de 10 pinouts af IC 4017 til opnåelse af en god 10-trins diskret styret ventilatorhastighedsregulering.
Liste over dele
R1, R3 = 100 ohm, R2 = 100K, R4 = 4K7, R5 = 10K,
C2 = 47uF / 25VC1, C4 = 22uF / 25V, C6 = 4.7uF / 25V,
C3 = 0,1, KERAMISK
C5 = 100uF / 50V
C10 = 0.22uF / 400V
T1 = BC557
IRS = TSOP IR-sensor
IC1 = 4017 IC
D1 = 1N4007
D2 = 12V 1 watts zener
R9 = 15K
R10 = 330K
R4 --- R8 = 50K, 100K. 150K, 220K
R11 = 33K
R12 = 100 ohm
Diac = DB-3
TR1 = BT136
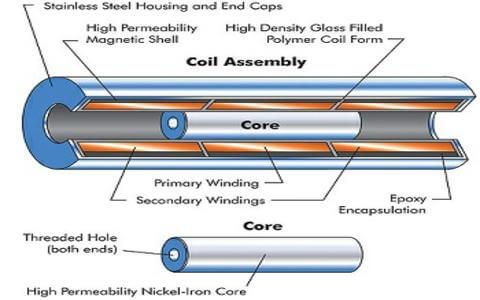
L1 = 500 omdrejninger på 28SWG over enhver jernbolt.
C7 = 0,1 uF / 600V
ADVARSEL: Hele kredsløbet er direkte forbundet med hovedstrømmen, bemærk ekstrem forsigtighed, mens man tester kredsløbet i en kraftig position
Forrige: Legetøjsmotorkredsløb med tidsstyret baglæns handling Næste: Water Flow Valve Timer Controller Circuit