Indlægget diskuterer et simpelt RC-helikopter-fjernbetjeningskredsløb ved hjælp af 433 kHz RF-moduler uden mikrokontroller eller komplekse joystickimplementeringer.
Idéen blev anmodet af Mr. Jitendra.
Kredsløbsmål og krav
- Jeg laver en storstilet RC-helikopter. I hvilken jeg bruger 4 motorer. For 1. hoved 12v-motor: mekanismen er, at jeg ønsker, at dens hastighed skal styres af en kontroltast på fjernbetjeningen, fra 0 til fuld hastighed.
- For 2. 3v motorer: dens mekanisme er kun til rotation fremad og bagud med individuel nøgle på fjernbetjeningen til hver motor, da den betjener rotorernes svingplader.
- For 3. 9v halemotor: den skal indstilles til en ligevægtshastighed ved hjælp af en regulator på modtagerkortet af helikopteren, så jeg kunne justere hastigheden manuelt for at stoppe helikopteren .. fra at rotere sammen med rotorerne, og der er en nøgle på fjernbetjening ville være at bremse og fremskynde motoren fra dens ligevægt.
- Indgangseffekten i modtagerkortet ville være 12v og strøm 8-10 ampere. Det skal være i området 500-800 meter. Sir kan du venligst designe et sådant RC-printkort sammen med fjernbetjeningen.
- Jeg er på jagt efter et sådant printkort siden sidste to år.
- Mit projekt blev stoppet på grund af dets fravær. Hjælp mig, sir. For din bekvemmelighed kan du designe to individuelle RC-kredsløbskort, en til hovedmotor og halemotor og en anden til to fremadgående og baglæns roterende motorer.
- Men indgangsstrømmen og potentialforskellen i begge kredsløb skal være ens, med samme rækkevidde, der er 500-800 meter med sine fjernbetjeninger eller fjernbetjening. Angiv også navnet på de nødvendige komponenter med nummerering.
Designet
De krævede kredsløbsmoduler, der kræves til opbygning af den foreslåede RC-helikopter, er:
1) En 12V PWM-regulator med variabel hastighed
2) Et 3V-motor baglæns styringskredsløb.
3) en 9V motorregulator med et regulator kredsløb med variabel hastighed.
Alle ovenstående specifikationer skal styres via en lang rækkevidde 433MHz RF fjernbetjeningsmodul .
Det ønskede 433MHz RF-fjernmodul kan købes fra enhver onlinebutik eller fra din nærmeste elektroniske forhandler. Fjernbetjeningens rækkevidde skal være i henhold til de krævede specifikationer for RC-helikopterområdet, her skal det være inden for 1 km.
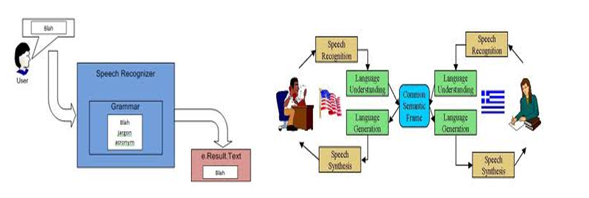
Til det diskuterede RC-helikopterfjernbetjeningskredsløb ville et 6-kanals RF-fjernmodul kræves, nøjagtigt svarende til det, der blev brugt til vores tidligere enkleste drone fjernbetjeningskredsløb .
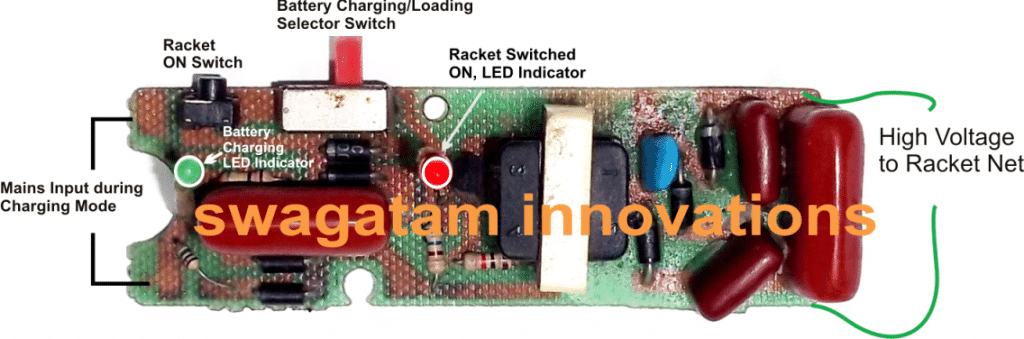
Billedet af det samme kan ses nedenfor:

Venstre side grønne kort er fjernmodtagermodulet med de seks kontrolrelæer, og disse enheder skal installeres inde i RC-helikopteren for de nødvendige kontroloperationer.
Højre sideenhed er senderhåndsættet, som formodes at blive holdt af brugeren, og de relevante knapper trykkes ned for at styre relækortet med den tilsvarende bevægelsesstyringsinfo.
Lad os nu se, hvordan de seks relæer skal konfigureres med de forskellige PWM-kredsløb og installeres inde i RC-chopper, fra følgende detaljer:
Husk, at relækontakterne, der vises på modtagerkortet, alle er tomme som standard, hvilket betyder, at deres N / C- og N / O-kontakter ikke er kabelforbundne og skal forbindes som illustreret i de følgende diagrammer.
I henhold til anmodningen skal 9V-motoren og 12V-motorhastigheden styres ved efterfølgende tryk på fjernbetjeningen. Kredsløbene til implementering af denne funktion er vist nedenfor:
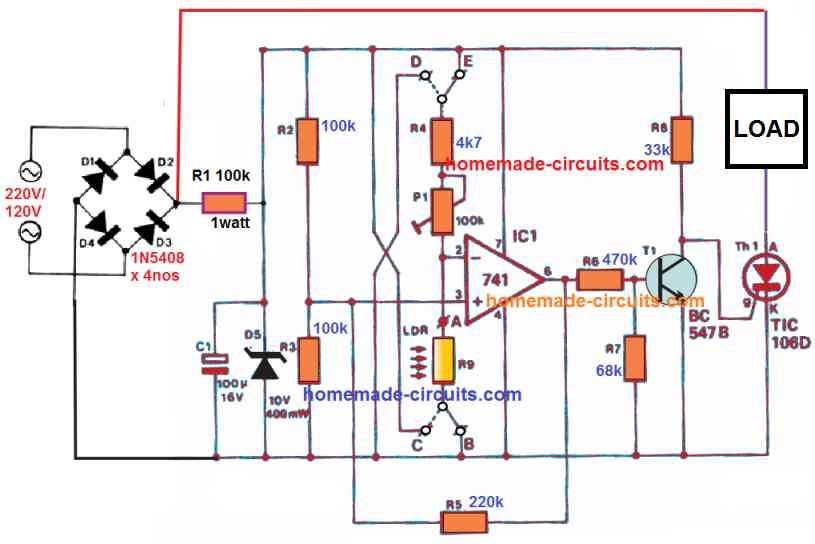
Motordriverskema


Kredsløb
Som det kan ses i skemaerne, et par identiske IC 555 PWM kredsløb er ansat til formålet. Fire ud af de seks relæer er involveret her med deres relevante kontakter kablet over de viste forbindelser.
I designet IC 555 er rigget som et grundlæggende, stabilt kredsløb, tildelt til at svinge med en bestemt frekvens afhængigt af dens R1-, R2- og C-komponentværdier .
En spændingsfølger i form af IC 741 er konfigureret med styretappen nr. 5 i IC 555 for at variere PWM-indholdet ved pin nr. 3 i IC 555 i overensstemmelse med de angivne relæoperationer.
Spændingen ved pin nr. 3 i IC 741 følges eller overføres ved pin nr. 6 og efterfølgende til pin nr. 5 på IC 555. Afhængig af ben nr. 3 kondensatorladningsniveau kan denne varierende spænding være hvor som helst mellem forsyningsspændingsgrænsen og nul.
Opladningsniveauet på kondensatoren varieres eller ændres ved blot at oplade det eller aflades via den relevante aktivering af relækontakt. For at oplade den øverste relækontakt lukkes eller aktiveres, hvilket muliggør en stigende spænding ved pin nr. 5 i IC 555, mens aktivering af de nedre relækontakter aflader kondensatoren, hvilket får en forholdsmæssigt lavere spænding til at vises ved pin nr. 5 i IC 555.
Ovenstående handlinger oversætter pin nr. 3-resultater til en tilsvarende varierende PWM, hvilket igen får motoren til at køre hurtigere eller langsommere.
Fra 9V-motoren kan en række dioder ses fastgjort ved drivertransistorens emitter, dette sikrer det krævede spændingsfald og hjælper med at konvertere 12V til en omtrentlig 10V reguleret forsyning i henhold til motorens specifikationer.
3V motor fremadgående drift
Det tredje og sidste krav i anmodningen er om baglæns / fremadgående kontrol på 3V-motoren ved at trykke på RF-senderhåndsættets knap.
De resterende to relæer kan nu eb bruges til denne særlige udførelse og udføres som vist i følgende diagram:

Også her anvender vi den alsidige IC 555 kablet som et præcist PWM-generator kredsløb. PWM er indstillet passende gennem 5K-forudindstillingen, inden installationen afsluttes, så motorens hastighed er perfekt justeret til den krævede ligevægt i helikopteren.
Relæerne kan ses simpelthen kabelforbundet til at håndhæve den krævede baglæns og fremad eller med eller mod urets bevægelse for motoren som reaktion på skiftet af den parrede relækontakt, som sammen danner et DPDT-relæ.
For at forhindre en kortslutning, bør modtagermodulet fortrinsvis modificeres til disse to relæer, således at ved at trykke på en af knapperne får begge relæer til at aktivere sammen temmelig solbrændt afhængigt af to kontakter, der skal synkroniseres for aktivering.
Denne skift kan forventes at vende motorens rotation i den modsatte retning med det samme, så brugeren kan udføre de krævede retningsændringer i RC-helikoptermaskinen.
Dette afslutter ledningsvejledningen til kredsløb og relæ til det foreslåede RC-helikopterfjernbetjeningskredsløb, hvis du er i tvivl, så tøv ikke med at udtrykke dem gennem dine kommentarer.
Tidligere: Ultralydssmart automatisk ON / OFF switch kredsløb Næste: Enkelt MOSFET klasse A effektforstærker kredsløb