Indlægget beskriver de forskellige metoder til konfiguration af et effektfaktorkorrektionskredsløb eller et PFC-kredsløb i SMPS-design og forklarer de bedste fremgangsmåder for disse topologier, så det overholder de moderne PFC-begrænsningsretningslinjer.
At designe effektive strømforsyningskredsløb har aldrig været let, men i løbet af tiden har forskere været i stand til at løse de fleste af de pågældende problemer, og ganske i samme linje optimeres de moderne SMPS-design også med de bedst mulige resultater takket være de nye lovgivningsmæssige standarder, som spillede en vigtig rolle i implementeringen af strengere kvalitetsparametre for de moderne strømforsyningsenheder.
PFC-retningslinjer
De moderne strømforsyningskvalitetsbegrænsninger er ret aggressivt fastlagt samlet af producenters, leverandørers og andre berørte styrende myndigheders indsats.
Blandt de mange kvalitetsparametre, der er fastlagt for moderne strømforsyningsdesign, er effektfaktorkorrektionskorrektion (PFC), der faktisk er i form af harmonisk annullering, blevet erklæret som et obligatorisk krav i IEC 61000-3-2-reglerne.
På grund af dette er designere tvunget til at imødegå hårdere udfordringer i design af effektfaktorkorrektionstrin i deres strømforsyningsdesign for at imødekomme disse strenge moderne love og med strømforsyninger, der bliver mere og mere formidable med sine specifikationer og anvendelsesområde, der strukturerer korrekte PFC-kredsløb bliver ikke lettere for de mange producenter i arenaen.
De præsenterede vejledninger er specielt dedikeret til alle de foreninger og fagfolk, der er i produktion eller design af flyback SMPS for at lette dem med de mest ideelle PFC-design og beregninger i henhold til deres individuelle behov.
Diskussionerne i disse vejledninger hjælper dig med at designe PFC-kredsløb, selv for betydeligt store enheder i intervallet op til 400 watt, 0,75 ampere.
Læserne får også mulighed for at lære om valg af enkelt-trins isolerede konvertere, der også inkluderer LED-drivere. Trin for trin-designvejledning og instruktioner sammen med sammenligninger på systemniveau vil de mange designere, der er aktivt involveret i kraftelektronikfeltet, blive oplyst om gå videre med den mest optimale tilgang til deres specifikke applikationsbehov
Effektfaktor Korrektion Mål
Optimering af effektfaktorkorrektionskredsløb inden for de moderne SMPS-enheder (switch mode power supply) kunne udvikle sig i den seneste tid på grund af fremkomsten af et antal avancerede relevante integrerede kredsløb (IC'er), som har gjort det muligt at fastlægge forskellige PFC-design med specifikke driftsformer og med individuel kapacitet til udfordringshåndtering.
Med stigningen i rækkevidden af SMPS-topologier er kompleksiteten i PFC-design og implementering også forværret i de nuværende dage.
I den første tutorial lærer vi os om de operationelle detaljer i designet, som mest foretrækkes af fagfolk, rettelserne.
Grundlæggende hjælper effektfaktorkorrektion med at optimere indgangsstrømmen inden for offline strømforsyninger, så disse er i stand til at forbedre den reelle effekt fra den tilgængelige lysindgang.
I henhold til det normale krav skal et givet elektrisk apparat emulere sig selv som en belastning med en ren modstand, så det gør det muligt at have et nul reaktivt strømforbrug.
Denne tilstand resulterer i generering af næsten nul indgangs harmoniske strømme, med andre ord tillader den forbrugte strøm at være perfekt på linje med indgangsforsyningsspændingen, som normalt er i form af en sinusbølge.
Denne præstation gør det muligt for apparatet at forbruge den “virkelige strøm” fra lysnettet på de mest optimale og effektive niveauer, hvilket igen resulterer i at minimere spild af elektricitet og øge dets effektivitet.
Denne effektive brug af elektricitet hjælper ikke kun apparatet med at præsentere sig på den mest effektive måde, men også for forsyningsselskaberne og det involverede kapitaludstyr til processen.
Ovenstående funktion gør det endvidere muligt for kraftledningerne at være fri for overtoner og den deraf følgende interferens på tværs af enhederne i netværket.
Bortset fra de ovennævnte fordele er inkludering af en PFC i moderne strømforsyningsenheder også for at overholde de lovmæssige krav, der er fastsat i Europa og Japan med IEC61000-3-2, som alt elektrisk udstyr skal kvalificere.
Ovennævnte tilstand er reguleret for de fleste af de elektroniske apparater, der kan klassificeres til over 75 watt i henhold til klasse D-udstyrsstandarder, eller som er endnu højere, idet den højeste amplitude af linjefrekvensharmonikerne specificeres op til 39. harmonisk.
Bortset fra disse standarder er PFC også anvendt til at sikre andre effektivitetsgevinster såsom Energy Star 5.0, der er afgørende for computere, og Energy Star 2.0 til strømforsyningssystemer og tv-apparater siden 2008.
Definition af Power Factor
PFC- eller effektfaktorkorrektion kan defineres som forholdet mellem reel effekt og tilsyneladende effekt og udtrykt som:
PF = Real Power / tilsyneladende magt, hvor Real Power udtrykkes i
Watts, mens tilsyneladende magt udtrykkes i VA.
I dette udtryk bestemmes den virkelige effekt som gennemsnittet af det øjeblikkelige produkt af strøm og spænding over en fase eller cyklus, mens den tilsyneladende effekt betragtes som RMS-værdien af strøm gange spændingen.
Dette antyder, at når strøm- og spændingsmodstykker er sinusformede og i fase med hinanden, er den resulterende effektfaktor 1,0.
I en tilstand, hvor den nuværende spændingsparameter er sinusformet, men ikke i fase, giver det imidlertid en effektfaktor, der er cosinus for fasevinklen.
Effektfaktorbetingelserne beskrevet ovenfor gælder i tilfælde, hvor spændingen og strømmen begge er rene sinusbølger, i forbindelse med en situation, hvor den ledsagende belastning består af resistive, induktive og kapacitive komponenter, som alle kan være ikke-lineære, justeres ikke med indgangsstrøm og spændingsparametre.
SMPS-topologier introducerer typisk ikke-lineær impedans i netledningen på grund af den ovenfor forklarede natur af dets kredsløb.
Sådan fungerer SMPS
Et SMPS-kredsløb inkluderer grundlæggende et ensrettertrin ved indgangen, som kunne være en halvbølge eller en fuldbølgeretter og en supplerende filterkondensator til at holde den ensrettede spænding over den til det maksimale niveau for indgangsforsyningens sinusbølge indtil tidspunktet for den næste top sinusbølge vises og gentager opladningscyklussen for denne kondensator, hvilket resulterer i den krævede maksimale konstante spænding over den.
Denne proces med opladning af kondensatoren på hver spids cyklus af vekselstrøm kræver, at indgangen skal være udstyret med tilstrækkelig strøm til at opfylde SMPS's belastningsforbrug imellem disse spidsintervaller.
Cyklussen implementeres ved hurtigt at dumpe en stor strøm i kondensatoren, som påføres belastningen ved afladning, indtil den næste peak-cyklus ankommer.
Til dette ujævne opladnings- og afladningsmønster anbefales det, at pulsstrømmen fra kondensatoren vurderes 15% højere end det gennemsnitlige behov for belastningen.

Vi kan se i ovenstående figur, at på trods af den betydelige mængde forvrængning er spændingen og de nuværende parametre tilsyneladende i fase med hinanden.
Men hvis vi anvender udtrykket 'fasevinkel cosinus' til ovenstående, vil det give anledning til en forkert slutning vedrørende strømforsyningen med en effektfaktor på 1,0
Den øvre og den nedre bølgeform angiver mængden af det harmoniske indhold af strømmen.
Her er det 'grundlæggende harmoniske indhold' angivet i sammenligning med en amplitude på 100%, mens de højere harmoniske præsenteres som de supplerende procentdele af den grundlæggende amplitude.
Men da den virkelige magt kun bestemmes af den grundlæggende komponent, mens de andre supplerende harmoniske kun repræsenterer den tilsyneladende magt, kan den faktiske effektfaktor være ret under 1,0.
Vi kalder denne afvigelse med udtrykket forvrængningsfaktor, som er fundamentalt ansvarlig for at give anledning til en ikke-enhedseffektfaktor i SMPS-enheder.
Udtryk for ægte og tilsyneladende magt
Et generelt udtryk, der adresserer forbindelsen mellem den virkelige og den tilsyneladende magt, kan gives som følger:

Hvor cosΦ danner forskydningsfaktoren, der kommer ud fra fasevinklen Φ mellem strøm- / spændingsbølgeformerne, og cosΦ betyder forvrængningsfaktoren.

Med henvisning til nedenstående diagram kan vi se en situation, der viser en perfekt effektfaktorkorrektion.

Vi kan se, at her replikerer den aktuelle bølgeform ganske ideelt spændingsbølgeformen, da begge tilsyneladende kører i fase og synkroniseret med hinanden.
Derfor kunne indgangsstrømovertonerne antages at være næsten nul.
Effektfaktorkorrektion mod harmonisk reduktion
Når man ser på de tidligere illustrationer, er det tydeligt, at effektfaktor og lave overtoner fungerer synkroniseret med hinanden.
Det opfattes generelt, at hvis grænserne for de respektive harmoniske er skitseret, kan det være med til at begrænse indgangsstrømforurening i kraftledninger ved at eliminere forstyrrende strømforstyrrelser med de andre apparater i nærheden.
Derfor, mens behandlingen af indgangsstrømmen kan betegnes som 'effektfaktorkorrektion', menes udgangsstørrelsen af forfining, at denne behandling forstås som harmonisk indhold a i henhold til de internationale retningslinjer.
For SMPS-topologier er det normalt forskydningselementet, der omtrent er samlet, hvilket giver anledning til følgende forhold mellem effektfaktor og harmonisk forvrængning.

I udtrykket repræsenterer THD den samlede harmoniske forvrængning som den kvadratiske sum af de skadelige harmoniske over det grundlæggende indhold, hvilket udtrykker den relative vægt af det tilknyttede harmoniske indhold med henvisning til den fundamentale modstykke. Den anden ligning forbinder den absolutte figur af THD og ikke i procentandelen%, hvilket udtrykker, at THD skal være i det væsentlige nul for at skabe en enheds-PF.
Typer af effektfaktorkorrektion
Indgangsbølgeformskarakteristikken i ovenstående figur viser en typisk “aktiv” type effektfaktorkorrektion for en SMPS-enhed indført mellem en indgangsretterkonfiguration og en filterkondensator og gennem et PFC-integreret kredsløb, der styrer proceduren sammen med det tilhørende kredsløb til sikre, at indgangsstrømmen følger sammen indgangsspændingens bølgeform.
Denne type behandling kan betragtes som den mest udbredte type PFC, der anvendes i de moderne SMPS-kredsløb, som det kan ses i nedenstående figur.
Når det er sagt, er det på ingen måde obligatorisk, at kun 'aktive' versioner, der bruger IC'er og halvledere, bruges til den foreslåede PFC, ellers er en anden form for design, der kan garantere en rimelig mængde PFC under de fastsatte regler, normalt velkomne.
Det bemærkes, at faktisk en enkelt spole, der erstatter positionen for den 'aktive' modstykke, er i stand til ganske tilfredsstillende at afvise harmoniske ved at styre toppe og ved at fordele strømmen ensartet synkroniseret med indgangsspændingen ret effektivt.
Passivt PFC-design
Imidlertid kan denne form for passiv PFC-styring kræve en markant voluminøs jerninduktionsspole og kan derfor bruges til applikationer, hvor kompaktitet ikke er et afgørende krav. (side 12)
En passiv enkelt induktor kan synes at være en hurtig løsning til PFC, men til applikationer med høj effekt kan størrelsen begynde at blive uinteressant på grund af dens upraktisk store dimensioner.
I nedenstående graf er vi i stand til at se inputkarakteristika for tre tal på 250 watt PC SMPS-varianter, der hver repræsenterer en strømbølgeform med en ækvivalent skalafaktor.
Vi kan let se, at resultatet opnået fra en passiv induktorbaseret PFC er 33% højere strømtoppe end med aktiv PFC-filtermodstykke.
Selvom dette muligvis er i stand til at overholde IEC61000-3-2-standarderne, vil det bestemt ikke være på niveau med den nylige strengere 0.9PF-kravregel og ville mislykkes QC-acceptniveauet indstillet i henhold til disse nye standarder.
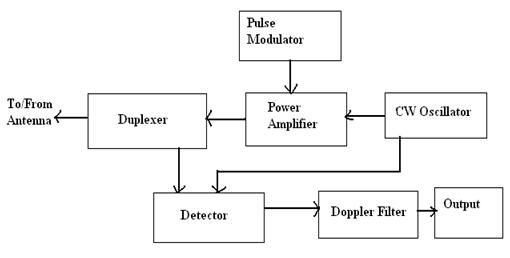
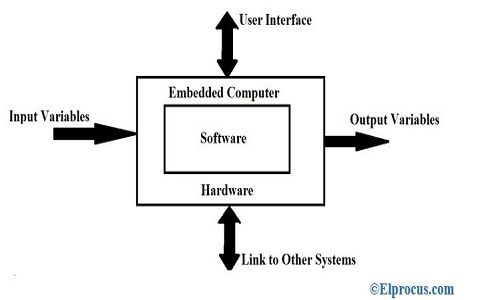
Grundlæggende blokdiagram

På grund af den igangværende elektroniske markedstendens, hvor vi kan se kobberomkostninger stigende sammen med stigningen i magnetiske kerneprocesser og introduktionen af moderne, meget billigere halvledermaterialer, vil det ikke være en overraskelse, hvis vi bemærker den aktive PFC-tilgang bliver overordentlig populær end den passive modstykke.
Og denne tendens kunne opfattes at vokse endnu stærkere i den kommende fremtid og præsentere mere og mere avancerede og forbedrede PFC-løsninger til de mange SMPS-designere og producenter.

Sammenligning af harmoniske indgangslinjer med IEC610003-2-standarder
I figur nedenfor er vi i stand til at se spor af tre separate 250 watt PC SMPS-resultater med henvisning til IEC6000-3-2-begrænsningerne. Den angivne begrænsning er gyldig for alle klasse D-gadgets såsom pc'er, tv'er og deres skærme.
Den viste grænse for harmonisk indhold er fastsat i overensstemmelse med enhedernes indgangseffekt. For produkter relateret til lamper, såsom LED-lamper, CFL-lamper, følges normalt C-begrænsninger, som er identisk med deres indgangseffektgrænser.
Andre ikke-konventionelle elektroniske produkter finder deres PFC-grænse indstillet i forhold til en minimumseffekt på 600 watt.
Hvis vi ser på det passive PFC-spor, finder vi, at det næppe er i overensstemmelse med den indstillede begrænsningsgrænse, bare en touch and go-slags situation (på harmonisk nr. 3)

Analyse af passive PFC-funktioner
I den følgende figur kan vi se et klassisk eksempel på passivt PFC-kredsløb designet til en traditionel pc-strømforsyning. Det bemærkelsesværdige her er forbindelsen af midterhanen på PFC-induktoren med indgangsspændingen på indgangsledningen.
Mens i 220V valgtilstand (switch åben), anvendes hele to sektioner af induktoren med ensretternetværket, der fungerer som et komplet bro-ensretterkredsløb.
Men i 110V-tilstand (switch close) bruges kun 50% eller den ene halvdel af spolen gennem den venstre sidesektion af spolen, der implementeres, hvorimod ensrettersektionen nu omdannes til et halvbølge-ensretterdobler-kredsløb.
Da 220V-udvælgelsen er bundet til at generere omkring 330V efter fuld bølgeforbedring, danner dette busindgangen til SMPS og har muligheden for at svinge væsentligt i overensstemmelse med indgangsspændingen.
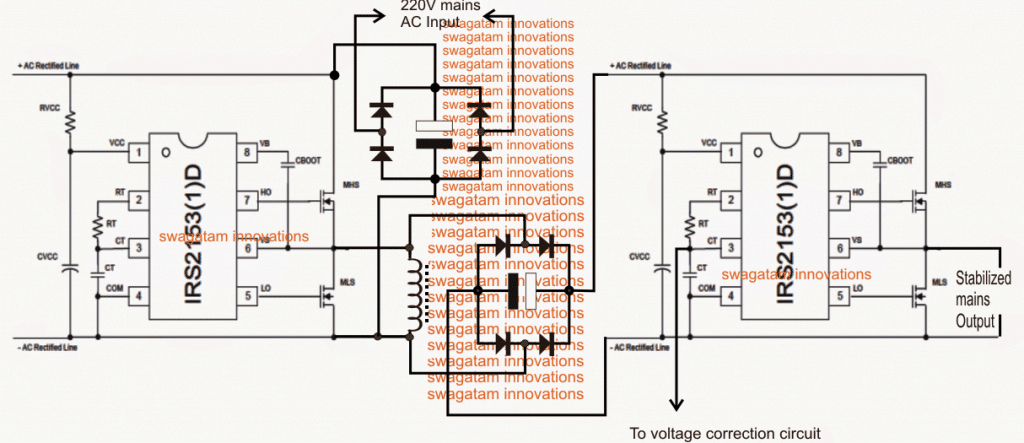
Eksempel på kredsløbsdiagram

Selvom dette passive PFC-design muligvis ser ret simpelt og imponerende ud med sin ydeevne, kan det udvise et par bemærkelsesværdige ulemper.
Sammen med PFC's omfangsrige natur er to andre ting, der påvirker dens ydeevne, først og fremmest inkluderingen af en mekanisk afbryder, der gør systemet sårbart over for en mulig menneskelig fejl under betjening af enheden, og også de dermed forbundne slidproblemer.
For det andet resulterer den ikke-stabiliserede netspænding i relative ineffektiviteter i fronterne af omkostningseffektivitet og DC til DC-effektomdannelsesnøjagtighed forbundet med PFC-output.
Critical Conduction Mode (CrM) -controllere
Controller-trin kaldet kritisk ledningstilstand, der også betegnes som overgangs-tilstand eller BCM-controller (borderline conduction mode) er kredsløbskonfigurationer, som kan findes effektivt anvendt i belysningselektronikapplikationer. Selvom det er problemfrit med dets anvendelighed, er disse controller relativt dyre.
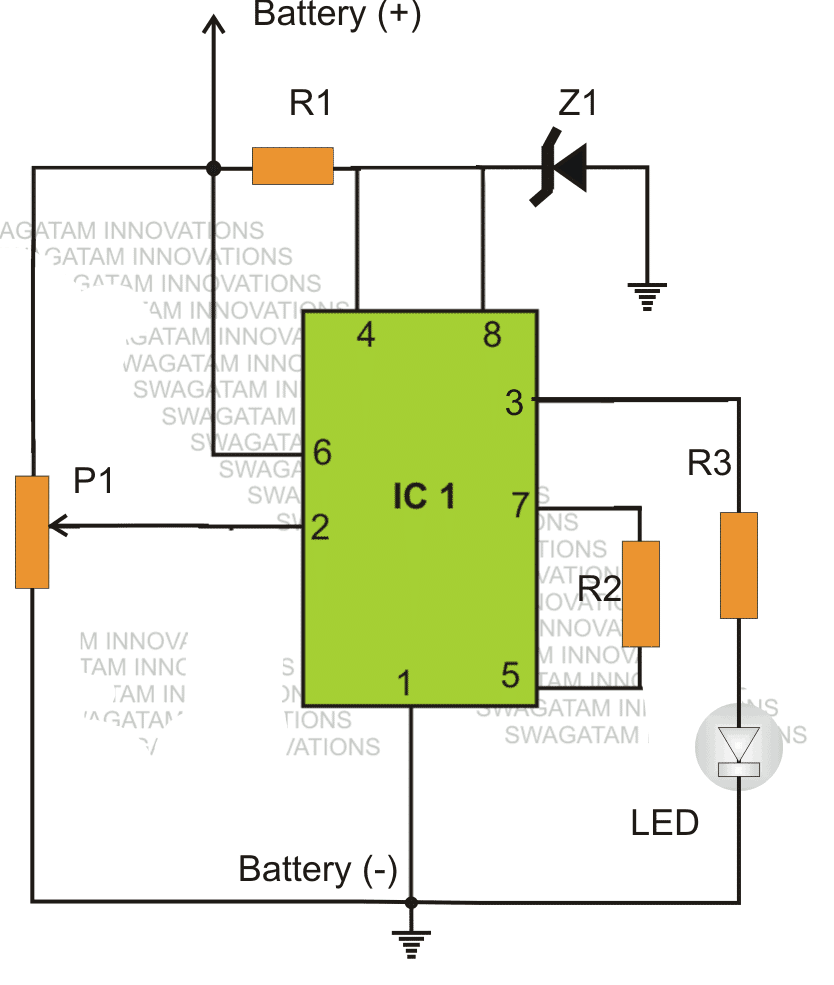
Følgende diagram 1-8 viser et regelmæssigt CrM controller kredsløb design.

Typisk vil en CrM-controller PFC have den ovenfor viste slags kredsløb, hvilket kan forstås ved hjælp af følgende punkter:
En indgang fra et referencemultiplikatorstrin modtager et passende dimensioneret signal fra et associeret fejlforstærkerudgang med en lavfrekvenspol.
Den anden indgang på multiplikatoren kan ses henvist til med en stabiliseret DC fastspændt spænding ekstraheret fra en ensrettet vekselstrømsindgang.
Det resulterende output fra multiplikatoren er således produktet af relativ DC fra fejlforstærkeroutputtet og det refererede signal i form af AC-sinusimpulser fra fuld bølge fra AC-indgangen.
Dette output fra multiplikatorstrinet kan også ses i form af sinusbølgepulser med fuld bølge, men passende nedskaleret i forhold til det anvendte fejlsignal (forstærkningsfaktor), der bruges som reference for indgangsspændingen.
Signalkildens signalamplitude justeres korrekt for at implementere den rigtige specificerede gennemsnitlige effekt og for at sikre en korrekt reguleret udgangsspænding.
Det trin, der er ansvarligt for behandling af den aktuelle amplitude, får strømmen til at strømme i overensstemmelse med udgangsbølgeformen fra multiplikatoren, men linjefrekvensstrømsignalamplituden (efter udjævning) kan forventes at være halvdelen af denne reference fra multiplikatorstrinet. .
Her kan operationerne ved strømformningskredsløb forstås som følger:

Idet der henvises til diagrammet ovenfor, står Vref for signalet ud fra multiplikatortrinet, som yderligere føres til et af opamperne i en komparator, hvis anden indgang henvises til med det aktuelle bølgeformssignal.
På tænd / sluk-kontakten øges strømmen over induktoren langsomt, indtil signalet over shunten har nået Vref-niveauet.
Dette tvinger komparatoren til at ændre sin output fra Til til FRA for at slukke for strømmen til kredsløbet.
Så snart dette sker, begynder den spænding, der gradvis ramte over induktoren, langsomt at falde mod nul, og når den først rører nul, vender opamp-udgangen tilbage og tænder igen, og cyklussen fortsætter med at gentage.
Som navnet på ovenstående karakteristik betyder, tillader systemets kontrolmønster aldrig induktorstrømmen at skyde over den forudbestemte grænse over de fortsatte og diskontinuerlige omskiftningstilstande.
Dette arrangement hjælper med at forudsige og beregne forholdet mellem det gennemsnitlige spidsstrømniveau for det resulterende output fra opampen. Da responset er i form af trekantede bølger, betyder gennemsnittet af bølgeformen nøjagtigt 50% af de faktiske toppe af trekantbølgeformerne.
Dette indebærer, at den resulterende gennemsnitlige værdi af det aktuelle signal fra trekantsbølgerne ville være = Induktorstrøm x R-følelse eller blot sætte halvdelen af det forudindstillede referenceniveau (Vref) af opampen.
Hyppigheden af regulatorer, der anvender ovenstående princip, vil afhænge af netspændingen og belastningsstrømmen. Frekvensen kunne være meget højere ved højere netspændinger og kunne variere, da linieindgangen varierer.
Frekvens fastspændt kritisk ledningstilstand (FCCrM)
På trods af sin popularitet i forskellige PFC-kontrolapplikationer til industriel strømforsyning involverer den ovenfor forklarede CrM-controller nogle iboende ulemper.
Hovedfejlen ved denne type aktiv PFC-kontrol er dens frekvens ustabilitet med hensyn til linje- og belastningsforhold, hvilket viser en stigning i frekvens med lettere belastninger og højere linjespændinger, og også hver gang indgangssinusbølgen nærmer sig nulgennemgangene.
Hvis der forsøges at rette op på dette problem ved at tilføje en frekvensklemme, resulterer det i et output med en forvrænget strømbølgeform, hvilket synes uundgåeligt på grund af det faktum, at 'Ton' forbliver ujusteret til denne procedure.

Imidlertid hjælper udviklingen af en alternativ teknik med at opnå en ægte effektfaktorkorrektion selv i diskontinuerlig tilstand (DCM). Funktionsprincippet kan studeres i figur nedenfor og med de vedlagte ligninger.

Med henvisning til diagrammet ovenfor kan spolens spidsstrøm evalueres ved at løse:

Den gennemsnitlige spolestrøm i forhold til koblingscyklussen (som desuden antages som den øjeblikkelige linjestrøm for den givne koblingscyklus på grund af det faktum, at koblingsfrekvensen normalt er højere end den linjefrekvens, hvorpå variationerne af linjespændingen finder sted ), udtrykkes med formlen:

Kombination af ovenstående forhold og forenkling af vilkårene giver følgende:

Ovenstående udtryk angiver tydeligt og antyder, at hvis en metode implementeres, hvor en algoritme sørger for at opretholde ton.tycle / Tsw på et konstant niveau, ville det gøre det muligt for os at opnå en sinusbølgeliniestrøm med en enhedseffektfaktor selv i det diskontinuerlige driftstilstand.
Selvom ovenstående overvejelser afslører nogle tydelige fordele for den foreslåede DCM-controller-teknik, ser det ikke ud til at være det ideelle valg på grund af de tilknyttede høje spidsstrømniveauer, som vist i følgende tabel:

For at opnå de ideelle PFC-forhold ville en fornuftig tilgang være at implementere en tilstand, hvor DCM og Crm-driftsformerne er slået sammen for at malke det bedste ud af disse to modstykker.
Derfor, når belastningsforholdene ikke er tunge, og CrM kører med en høj frekvens, går kredsløbet til en DCM-driftstilstand, og i tilfælde af at belastningsstrømmen er høj, får Crm-tilstanden fortsat, så de aktuelle toppe ikke har tendens til at krydse de uønskede høje grænser.
Denne form for optimering på tværs af de to foreslåede kontroltilstande kan bedst visualiseres i den følgende figur, hvor fordelene ved de to kontroltilstande flettes for at opnå de mest ønskelige løsninger.

Fortsætter ledningstilstand
Den kontinuerlige ledningstilstand for PFC kan blive meget populær i SMPS-design på grund af deres fleksible applikationsfunktion og rækkevidde og de tilknyttede adskillige fordele.
I denne tilstand opretholdes den aktuelle spidsbelastning på et lavere niveau, hvilket resulterer i minimerede koblingstab inden for de relevante komponenter, og desuden gengives input-krusningen på et minimalt niveau med en relativt konstant frekvens, hvilket igen muliggør udglatningsprocessen meget enklere for det samme.
Følgende attributter forbundet med CCM-type PFC skal diskuteres lidt mere detaljeret.
Vrms2 kontrol
En af de vitale attributter med mest anvendt PFC-design, der er universelt anvendt, er referencesignalet, der skal være en eftertragtning af den korrigerede indgangsspænding.
Denne minimerede udbedrede ækvivalent af indgangsspændingen påføres endelig i kredsløbet til formning af den korrekte bølgeform for udgangsstrømmen.
Som diskuteret ovenfor anvendes et multiplikatorkredsløbstrin normalt til denne operation, men som vi ved, at et multiplikatorkredsløbstrin kunne være relativt mindre omkostningseffektiv end et traditionelt twn-input multiplikatorsystem.
Et klassisk eksempellayout kan ses i figuren nedenfor, som viser en kontinuerlig PFC-tilgang.
Som det kan ses, udløses boostkonverteren her ved hjælp af en gennemsnitlig strømtilstand PWM, der bliver ansvarlig for dimensionering af induktorstrømmen (indgangsstrøm til konverteren) med henvisning til kommandostrømssignalet, V (i) , som kan ses som den nedskalerede ækvivalent af indgangsspændingen V (in) til en andel af VDIV.
Dette implementeres ved at dividere fejlspændingssignalet med firkanten af indgangsspændingssignalet (udjævnet af kondensatoren Cf for at skabe en forenklet skaleringsfaktor med reference til indgangsspændingsniveauet).

Selvom du måske finder det lidt akavet at se fejlsignalet divideres med firkantet af indgangsspændingen, er årsagen til denne foranstaltning at skabe en loopforstærkning (eller et forbigående afhængigt svar), som muligvis ikke er baseret på indgangsspændingen udløser.
Kvadrering af spændingen ved nævneren neutraliserer med værdien af Vsin sammen med overføringsfunktionen for PWM-styringen (proportionaliteten af den aktuelle grafhældning af induktionsrøret med indgangsspændingen).
Imidlertid er en ulempe ved denne form for PFC multiplikatorens fleksibilitet, som tvinger dette trin til at være lidt overdesignet, især kredsløbets strømhåndteringssektioner, så det opretholder selv de værst tænkelige strømforsyningsscenarier.
Gennemsnitlig nuværende tilstandskontrol
I ovenstående figur kan vi se, hvordan referencesignalet produceret fra multiplikatoren V (i) betegner formen på bølgeformen og skaleringsområdet for PFC-indgangsstrømmen.
Den angivne PWM-fase bliver ansvarlig for at sikre, at en gennemsnitlig indgangsstrøm er på niveau med referenceværdien. Fremgangsmåden udføres gennem en gennemsnitlig strømtilstands controller-fase, som det kan ses i nedenstående figur.

Den gennemsnitlige strømtilstandskontrol er grundlæggende konfigureret til at regulere den gennemsnitlige strøm (input / output) med henvisning til styresignalet Icp, som igen oprettes ved at anvende en lavfrekvent DC-loop gennem et fejlforstærkerkredsløbstrin, og dette er intet andet end den ækvivalente strøm svarende til signalet Vi, der er vist i den tidligere figur til dette.
Trinstrømforstærkeren fungerer som en strømintegrator såvel som en fejlforstærker for at regulere formen på bølgeformen, hvorimod Icp-signalet, der genereres over Rcp, bliver ansvarlig for udførelse af DC-indgangsspændingskontrol.
For at sikre et lineært svar fra den nuværende forstærker kræves det, at dens indgang er ens, hvilket betyder, at den potentielle forskel, der genereres over R (shunt), skal svare til den spænding, der genereres omkring Rcp, fordi vi ikke kan have en jævnstrøm gennem ikke-inverterende modstandsindgang på den nuværende forstærker.
Outputtet genereret af den nuværende forstærker formodes at være et 'lavfrekvens' -fejlsignal afhængigt af shuntens gennemsnitlige strøm såvel som signalet fra Isp.
Nu genererer en oscillator et savtandsignal, der bruges til at sammenligne ovenstående signal med det, ligesom det er gjort med spændingstilstandsstyringsdesignet.
Dette resulterer i oprettelsen af PWM'er bestemt ved at sammenligne de ovennævnte to signaler.
Avancerede PFC-løsninger
De forskellige metoder til PFC-kontrol som beskrevet ovenfor (CrM, CCM, DCM) og deres varianter giver designerne forskellige muligheder for at konfigurere PFC-kredsløb.
På trods af disse muligheder har den konsekvente søgen efter at opnå bedre og mere avancerede moduler med hensyn til effektivitet gjort det muligt for mere sofistikerede designs at blive diagnosticeret til disse applikationer.
Vi diskuterer mere om dette, da denne artikel er opdateret med det nyeste om emnet.
Forrige: Sådan vælges den rigtige oplader til Li-Ion-batteri Næste: Solar E Rickshaw Circuit