I dette indlæg skal vi udforske databladet for PIR eller Pyroelectric Infrared Radial Sensor HC-SR501. Vi forstår til hvilket formål PIR-sensor bruges? Dens grundlæggende triggeroperationer, pin-forbindelsesdetaljer, tekniske specifikationer og endelig vil vi se på nogle virkelige applikationer.
Vi begynder med at forstå den egentlige PIR-sensorenhed, der er installeret inde standard PIR-moduler og lære dens interne egenskaber, pinout detaljer og interne arbejdsdetaljer.

Hvad er en PIR-sensor?
PIR står for pyroelektisk infrarød radial sensor eller passiv infrarød sensor. PIR er en elektronisk sensor, der registrerer ændringer i det infrarøde lys over en vis afstand og afgiver et elektrisk signal ved dets udgang som reaktion på et detekteret IR-signal. Det kan registrere ethvert infrarødt udsendende objekt, såsom mennesker eller dyr, hvis det er inden for sensorens rækkevidde, eller bevæger sig væk fra området eller bevæger sig inden for sensorens rækkevidde.
PIR-sensormodulet kan opdeles i to dele af en infrarød følsom krystal og behandlingskredsløbet.
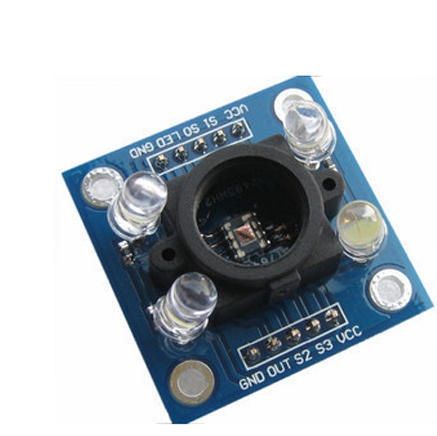
Illustration af PIR-følsom krystal:

Den mørke del af metallet, hvor den IR-følsomme krystal er anbragt, den følsomme krystal kan registrere niveauet af infrarødt i omgivelserne. Det huser faktisk to pyroelektiske sensorer til detektering af bevægelige objekter. Hvis en af de følsomme krystaller registrerer ændring i infrarød (stigning eller formindskelse) end den anden følsomme krystal, bliver output udløst.
En kuppelformet plaststruktur er normalt placeret over denne følsomme krystal, der fungerer som en linse til at fokusere det infrarøde lys på sensorerne.
Sådan fungerer PIR
Registreringsoperationen af en pyroelektrisk infrarød sensor er baseret på den egenskab eller egenskab, der bliver ansvarlig for at ændre polarisationen af dets materiale som reaktion på temperaturændringer.
Disse sensorer anvender et dobbelt eller et par sensorelementer til registrering af IR-signaler i to trin, hvilket sikrer en idiotsikker detektion ved at annullere de uønskede temperaturvariationer inden for det eksisterende EMI-trin. Denne to-trins sensorproces forbedrer sensorens samlede stabilitet og hjælper kun med at detektere IR-signaler fra menneskelig tilstedeværelse.
Når et menneske eller en relevant IR-kilde bevæger sig forbi en PIR-sensor, skæres strålingen ind i paret af sensorelementer på en alternativ måde, hvilket udløser output til at generere et par ON / OFF eller høje og lave impulser som vist i følgende bølgeform:

Den følgende grove Gif-simulering viser, hvordan en PIR-sensor reagerer på et menneske i bevægelse og udvikler et par korte skarpe impulser på tværs af dets outputledninger til den nødvendige behandling eller udløser et passende konfigureret relætrin

Internt layout af en PIR
Følgende figur viser det interne layout eller konfigurationen inde i en standard PIR-sensor.

Til venstre kan vi se et par IR-sensingelementer forbundet i serie. Den øverste ende af denne serie er forbundet med porten til en indbygget FET, der fungerer som en lille IR-signalforstærker. Rg-pull down-modstanden tilvejebringer den krævede standby-nulogik til FET for at sikre, at den forbliver helt slukket i fravær af et IR-signal.
Når et IR-signal i bevægelse detekteres af paret af sensorelementer, genererer det et tilsvarende par hi og lave logiske signaler som beskrevet ovenfor:
Disse impulser forstærkes hensigtsmæssigt af FET og replikeres ved dens udgangsstift til yderligere behandling af et tilsluttet kredsløb.
De tilknyttede EMI-trin sammen med kondensatoren giver ekstra filtrering til processen for at producere et rent sæt pulser ved den angivne udgangsstift på PIR.
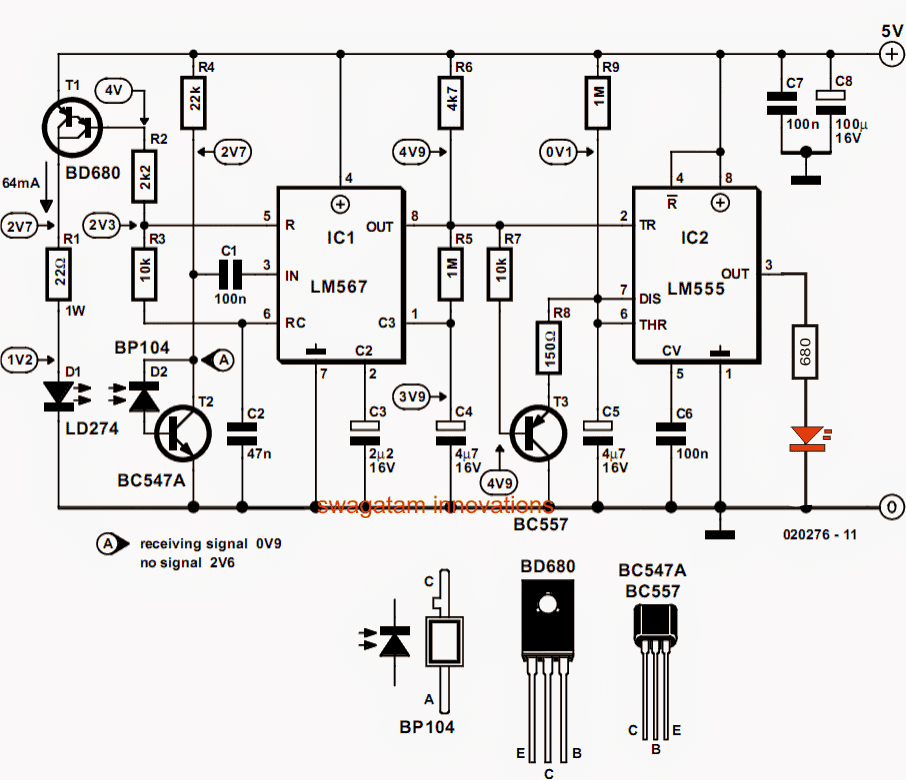
Testopsætning til PIR-sensoren
Det følgende billede viser en standard PIR-sensortest opsat. Udgangen og Vss-stifter (negativ stift) på PIR er forbundet med en ekstern pull down-modstand, Vdd-stiften leveres med en 5V-forsyning.

Et brevpapir sort legeme genererer den krævede ækvivalent infrarød stråling til PIR-sensoren gennem en chopper-mekanisme. Chopperpladen skærer skiftevis IR-signalerne, der efterligner et bevægeligt IR-mål.
Dette hakkede IR-signal rammer PIR-sensoren, der genererer de specificerede impulser på tværs af dens udgangsstift, som passende forstærkes gennem en opamp til analyse på et omfang.
De ideelle testbetingelser for ovenstående opsætning kan ses nedenfor:

Afbalancering af sensingelementets output
Da der anvendes en dobbelt sensormekanisme i PIR'er, bliver det nødvendigt at sikre, at behandlingen gennem linseparret er korrekt afbalanceret.
Følerelementerne testes og konfigureres passende ved at evaluere den respektive enkelt signaludgangsspænding (SSOV) ved hjælp af følgende formel:
Vægt: | Va - Vb | / (Va + Vb) x 100%
Hvor, Va = følsomhed af side A (mV peak til peak)
Vb = Følsomhedsside B (mV peak til peak)
Vigtigste specifikationer
De vigtigste tekniske specifikationer og dimensionsparametre for en PIR-sensor kan læres ud fra følgende detaljer:

Brug af PIR-indvendige moduler
I dag finder du PIR-moduler med en PIR-sensor integreret med specialiserede processorkredsløb og linser. Dette forbedrer PIR's mange folder og giver slutbrugeren mulighed for at få veldefineret optimeret, forstærket output fra modulet.
Denne udgang skal nu kun konfigureres med et relætrin til den krævede ON / OFF-kobling af en belastning som reaktion på en menneskelig tilstedeværelse over den angivne zone.
Kredsløbet inde i standardmoduler består af IC BISS0001, som er specielt designet til bevægelsesdetekteringsapplikationer. Der findes to drejeknapper, en til justering af modulets følsomhed, og en anden drejeknap til justering af tidslængden, hvor længe output skal forblive HØJ, efter at modulet er udløst.

Lad os nu undersøge de tekniske detaljer i PIR-sensoren HC-SR501.
Driftsspænding:
HC-SR501 er fra 5 V til 20 V, hvilket giver stor fleksibilitet for kredsløbsdesignere.
Nuværende forbrug:
HC-SR501 er en batterivenlig enhed, dens nuværende forbrug er 65 mA, når den registrerer ændringer i IR-lys.
Udgangsspænding:
Når modulet registrerer en bevægelse af infrarød, går udgangen HØJ ved 3,3 V, hvis modulet ikke registrerer nogen bevægelse, går den LAV eller 0 V efter en fast periode.
Forsinkelse:
Der er tilvejebragt en knap til at justere tiden for output, så den forbliver HØJ efter detektering af IR. Dette tidsrum kan justeres fra 5 sekunder til 5 minutter.
Følsomhedsområde:
Vinklen på detektionsområdet er omkring 110 graders kegle. Der gives en knap til at justere følsomheden, vi kan variere fra 3 meter til 7 meter vinkelret på senor. Følsomheden mindskes, når vi bevæger begge sider af sensoren.
Driftstemperatur:
HC-SR501 har en imponerende driftstemperatur fra -15 til +70 grader Celsius.
Hvilestrøm:
Hvilestrømmen er den strøm, der forbruges fra forsyningen, når sensoren ikke registrerer nogen bevægelse, eller når den er i tomgang. Det bruger mindre end 50 uA, hvilket gør sensorbatteriet venligt.

PIR pinouts og trigger modes
Trigger-tilstande:
PIR-modulet har to triggertilstande: Single trigger / non-repeat mode og repeat trigger. Disse to tilstande kan fås ved at ændre den jumperposition, der er angivet i modulet.
Enkelt udløsertilstand / ikke-gentagelsestilstand:
Når PIR-sensoren er indstillet i en enkelt udløsertilstand (og timer-knappen / forsinkelsestiden er indstillet til 5 sekunder (siger)), når et menneske detekteres, bliver udgangen HØJ i 5 sekunder og drejer LAV.
Gentag udløsertilstand:
Når PIR-sensoren er indstillet i gentagelsesudløsertilstand, når et menneske detekteres, bliver output HØJ, tæller timeren i 5 sekunder, men når et andet menneske detekteres med i disse 5 sekunder, nulstilles timeren til nul og tæller yderligere 5 sekunder efter 2. menneske opdages.
Blokeringstid:
Blokeringstiden er det tidsinterval, hvor sensoren er deaktiveret eller ikke registrerer bevægelse. Blokeringstiden for HC-
SR501 er som standard 3 sekunder.
Dette sker efter forsinkelsestiden (som blev indstillet ved hjælp af timer-knappen) output går LAVT i 3 sekunder i løbet af dette interval registreres ingen bevægelse. Efter de 3 sekunder (LAV) er sensoren klar til at registrere bevægelse igen.
Med andre ord, når sensoren registrerer bevægelse, bliver udgangen HØJ, forbliver udgangen HØJ i henhold til timer-knappen (siger 5 sekunder), efter 5 sekunder går PIR-sensoren LAV, LAV signal forbliver i 3 sekunder uanset den nye bevægelse, hvis nogen.
Mål på modulet:
Sensoren er kompakt nok til at skjule sig fra folks synspunkt, så den ikke påvirker dekorationer osv. Den måler 32 mm x 24 mm.
Linsestørrelse:
Den hvide kuppelstruktur, der omslutter den pyroelektriske sensor, kaldes Fresnel-linser, hvilket øger detekteringsområdet, og det ser uigennemsigtigt ud. Den måler 23 mm i diameter.
Anvendelser:
• Sikkerhedssystemer.
• Automatiske lys.
• Industriel automatikkontrol.
• Automatiske døre.
Du kan finde nogle af projekterne ved hjælp af PIR-sensor på dette websted.
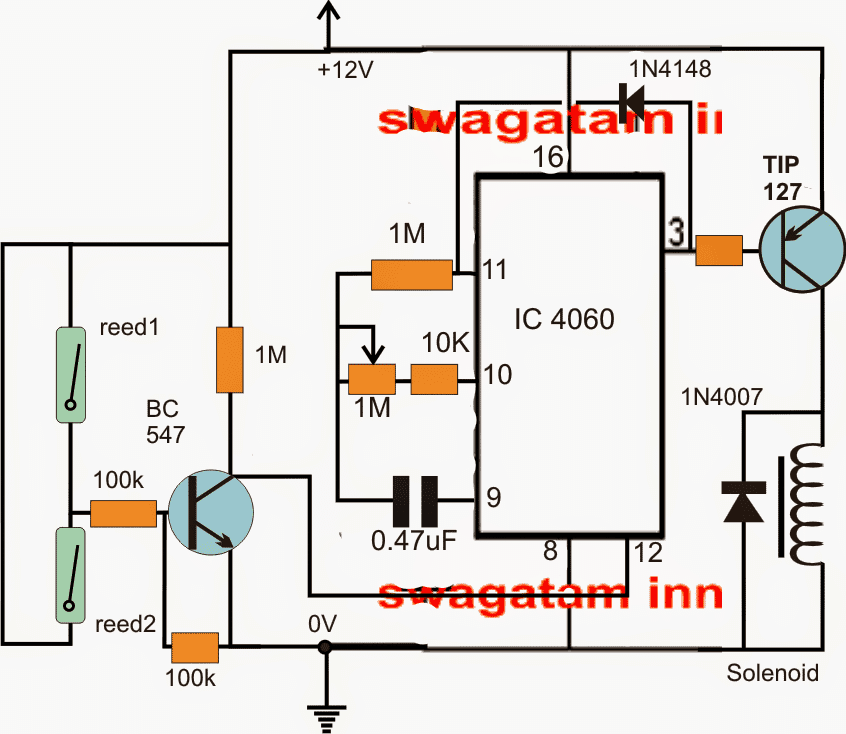
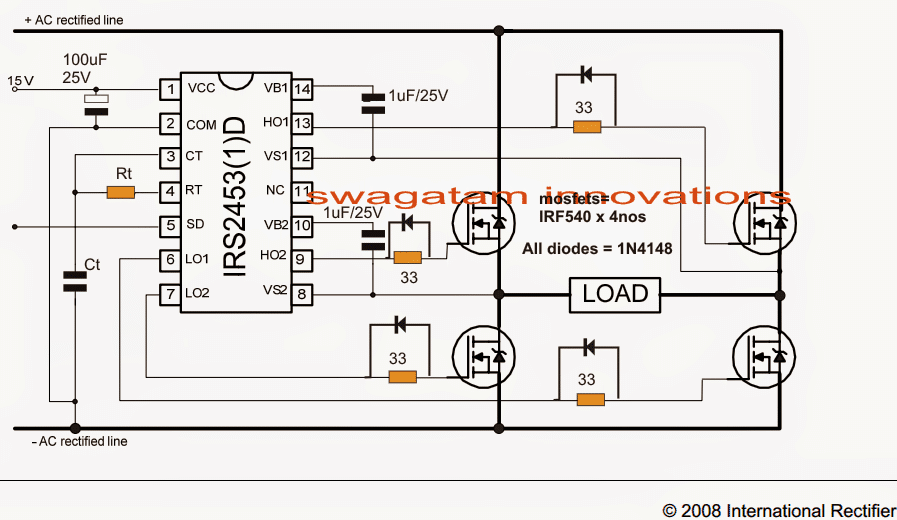
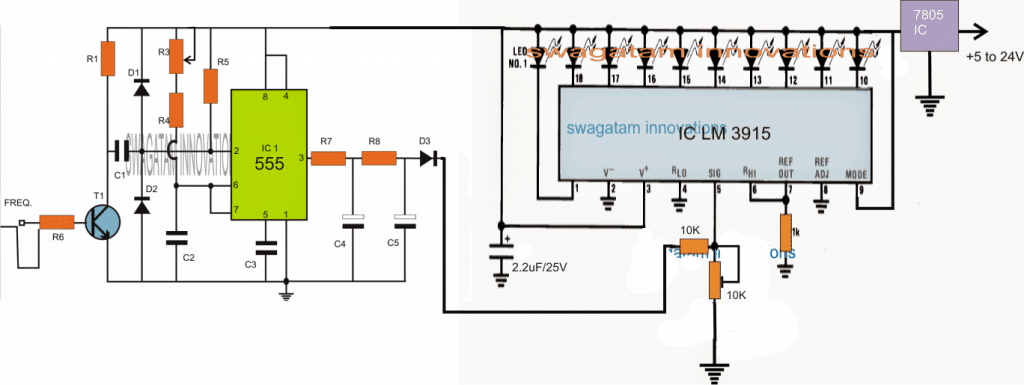
Typisk PIR-modul kredsløb
For entusiaster, der har til hensigt at bygge det komplette PIR-modul sammen med sensoren og en fuldgyldig forstærker, kan følgende standardskema anvendes og bruges til enhver relevant PIR-sensorbaseret applikationsudløsning.

Har du yderligere tvivl eller spørgsmål? Du er velkommen til at fremlægge dem gennem nedenstående kommentarfelt
Forrige: Arduino Full-Bridge (H-Bridge) inverter kredsløb Næste: Køretøjshastighedsdetektor kredsløb til trafikpoliti