I denne del af artiklen lærer vi om en innovativ metode til konvertering af pedalpressemekanisme i elektriske køretøjer til et tilsvarende varierende elektrisk signal, som yderligere kan bruges til behandling af køretøjets hastighedskontrol.
Det forklarede koncept fungerer som en elektronisk accelerator, som øger køretøjets hastighed lineært, når pedalen gradvis trykkes ned og omvendt ved hjælp af PWM-teknologi
Ideen blev anmodet om af Mr.Lokesh Maini
Tekniske specifikationer
Jeg er en mekanisk fyr, der i øjeblikket arbejder på et elektrisk køretøj, og jeg vil kontrollere hastigheden på min motor ved hjælp af pedal. Jeg får ikke en controller til min motor, vær så venlig at hjælpe mig med at opbygge min egen, jeg bliver meget
taknemmelig
Motorspecifikationer er 36 volt, 43 lamper og 1,5 hk børstet jævnstrømsmotor.
Det mekaniske design
En elektronisk version af en pedalaccelerator vil primært kræve en mekanisme til først at konvertere mekanisk presning af pedalen til et tilsvarende varierende elektrisk signal, så dette signal kan behandles gennem et signalprocessortrin til den ønskede konvertering til en praktisk hastighedskontrol af køretøj.
Mange begreber kan afprøves, f.eks. Ved hjælp af en piezo-belastningssensor, en kapacitiv belastningssensor, af en resonanssensor osv. I denne artikel lærer vi en meget enklere metode udtænkt af mig, som indeholder en LED / LDR-enhed til at opnå det samme .

I det elektromekaniske arrangement vist i figuren ovenfor er vi i stand til at se følgende integrerede komponenter:
Et lille gear fastgjort med en skruemekanisme.
Skruehovedet har en hvid matreflektoroverflade
En LED / LDR-enhed placeret foran skruehovedet.
Sådan fungerer den foreslåede mekanisme.
Gearet vist i ovenstående figur skal låses med et andet gear med et forhold, der kan være 10 gange højere end dette gear.
Det større gear skal konfigureres med pedalmekanismen, så den initierer en rotationsbevægelse som reaktion på tryk på pedalen.
Rotationsresponset fra gearene vil igen producere en fremadrettet bevægelse af skruehovedet over kammeret, hvor LED / LDR-enheden er placeret.
Processen vil medføre, at en proportionalt varierende mængde reflekteret lys fra LED'en modtages af LDR.
Disse forskellige data (i form af en varierende modstand) svarende til pedalnedtrykket kan derefter føres til et signalprocessorkredsløb til at håndhæve den tilsigtede hastighedskontrol af det bestemte køretøj.
I næste indlæg vi lærer signalprocessortrinet ved hjælp af PWM-teknik.
I ovenstående afsnit vi lærte om en simpel elektromekanisk konverterkonstruktion til omdannelse af pedalhandling til et proportionalt varierende elektrisk signal.
Konvertering af pedalhandling til PWM
Lad os nu studere en kredsløbsimplementering, der gør det muligt for os at konvertere pedalens elektriske signal til et tilsvarende varierende PWM-signal til køretøjets tilsigtede motorhastighedskontrol.

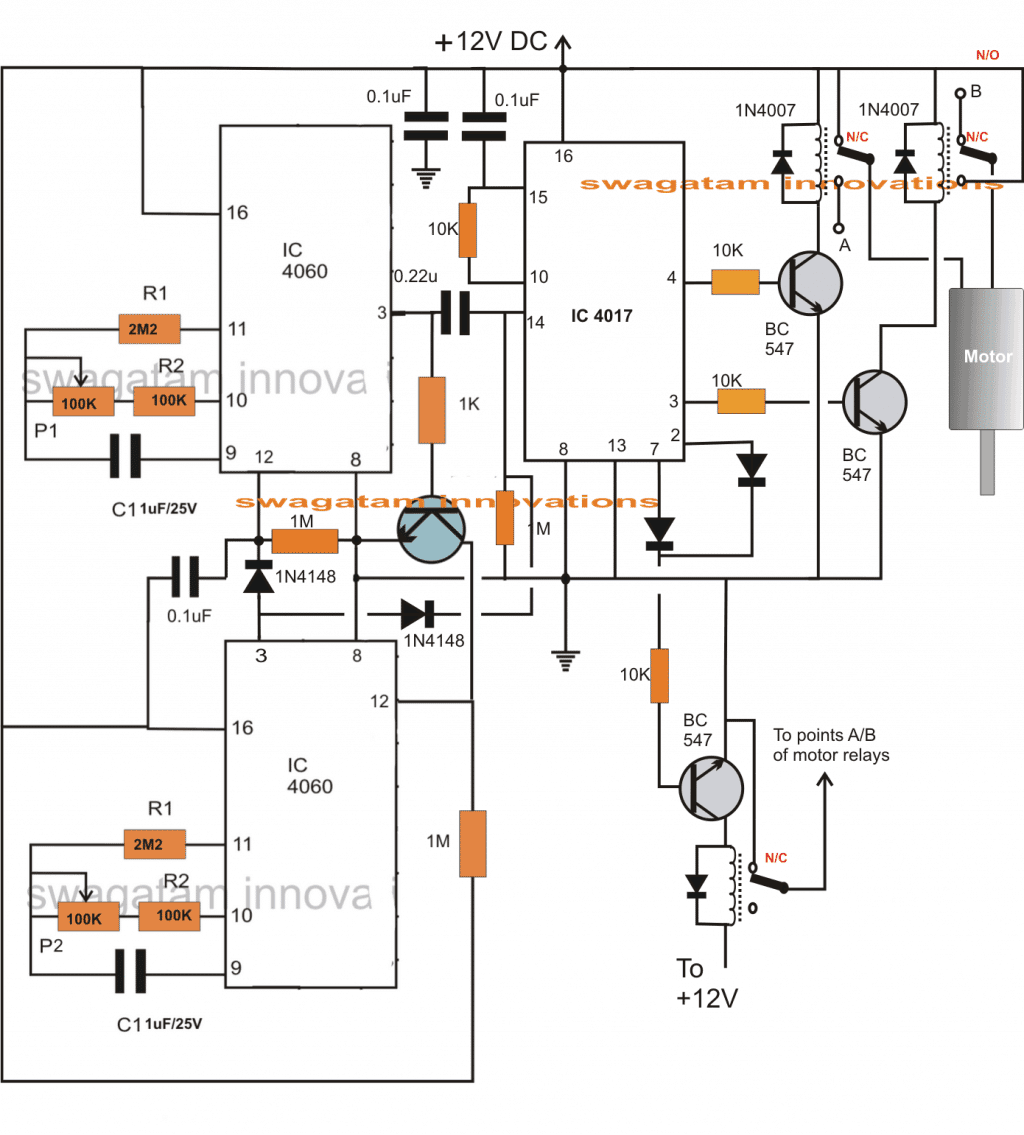
Under henvisning til ovenstående kredsløbsdiagram kan vi vurdere kredsløbets funktion ved hjælp af følgende punkter:
IC1 er konfigureret som en 80Hz impulsgenerator med maksimal ON-tid og minimum OFF-tid som sin driftscyklus
IC2 er rigget som en komparator, der først konverterer den ovennævnte 80Hz-puls, der påføres sin pin2 med trekantbølger, der genereres ved dens pin6, og sammenligner trekantsbølgerne med den modulerende spænding, der er tilgængelig på sin pin5.
Pin5-modulerende spænding stammer fra en BJT BC547-emitter, der er konfigureret som en fælles kollektor med sin base forbundet med LDR-indgange opnået fra pedalhandlingerne.
De forskellige modstande som reaktion på pedalpresningen sammenlignes med 100K-forudindstillet indstilling, og der udvikles en proportional spændingsstørrelse ved bunden af transistoren, som konverterer lavstrømsindgangen til et ækvivalent højstrømsignal over pin5 af IC2.
Dette øjeblikkelige potentielle niveau accepteres og behandles af IC2, der genererer proportional størrelse af PWM-signaler til mosfet og den tilsluttede motor.
Motorhastigheden styres således og varieres i henhold til de svingende PWM'er som reaktion på køretøjets pedaltryk.
Ovenstående procedurer omdanner effektivt pedalhandlinger til en kontrolleret operation af køretøjets motor og dens hastighed.
Sådan opsættes kredsløbet.
Det er meget let.
- Tryk pedalen til det maksimale punkt, så skruehovedet når den nærmest mulige position foran LED / LDR-enheden.
- Derefter justeres 100k forudindstillingen, indtil pin3 på IC2 begynder at generere PWM'er med maksimal bredde, dette kan bekræftes ved at måle spændingen ved pin3 for at være så tæt som muligt på kredsløbets forsyningsspænding, det vil sige 5V.
- Når dette er gjort, kan installationsproceduren antages at være afsluttet.
- Resultaterne kunne nu verificeres ved at trykke på pedalen på forskellige niveauer og kontrollere motorhastigheden varierer på en identisk måde.
Forrige: Simple ESR Meter Circuit Næste: Hvordan man bygger et Grow Light Circuit