Indlægget forklarer en simpel hindring, der undgår robotkredsløb uden mikrocontroller og uden brug af specielle motordriverkredsløb eller IC'er. Idéen blev anmodet af Mr. Faiyyaz
Designet
Dybest set er det i form af en køretøj i bevægelse som er i stand til at opdage og undgå potentielle forhindringer på sin vej og ændre sin retning passende, så dens bevægelse forbliver uafbrudt, enkel!
Operationen er således automatisk uden manuel eller menneskelig indgriben.
Den præsenterede idé om en hindring, der undgår robot uden mikrocontroller, som navnet antyder, anvender ikke en mikrokontroller og er derfor ekstremt enkel at bygge og passer til enhver ny hobbyist.
Mens jeg designede kredsløbet, indså jeg, at der for at implementere princippet i det mindste ville være nødvendigt med et par forhindringer, sensormoduler, fordi brug af et enkelt modul kan forårsage uregelmæssig bevægelse af motoren og måske ikke hjælpe med en jævn omdrejning eller drejning af køretøjet mod en fri vej.
Køretøjets motoropsætning er meget lig den fjernbetjening legetøjsbil som jeg havde drøftet i et af de tidligere indlæg.
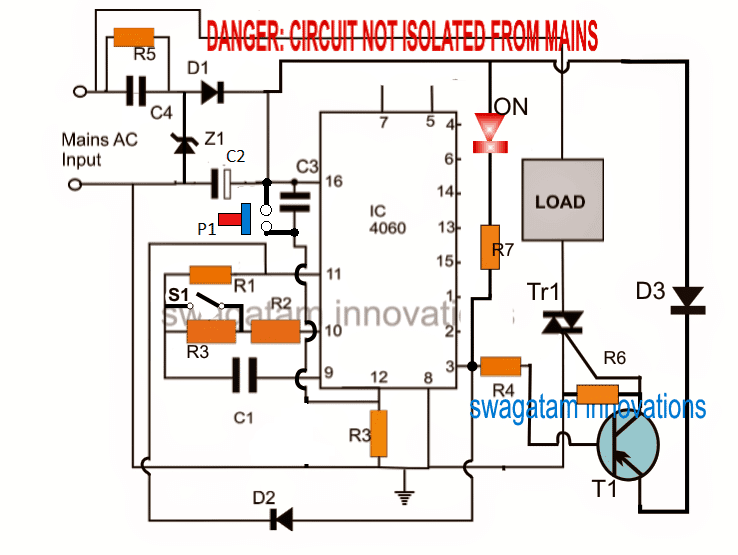
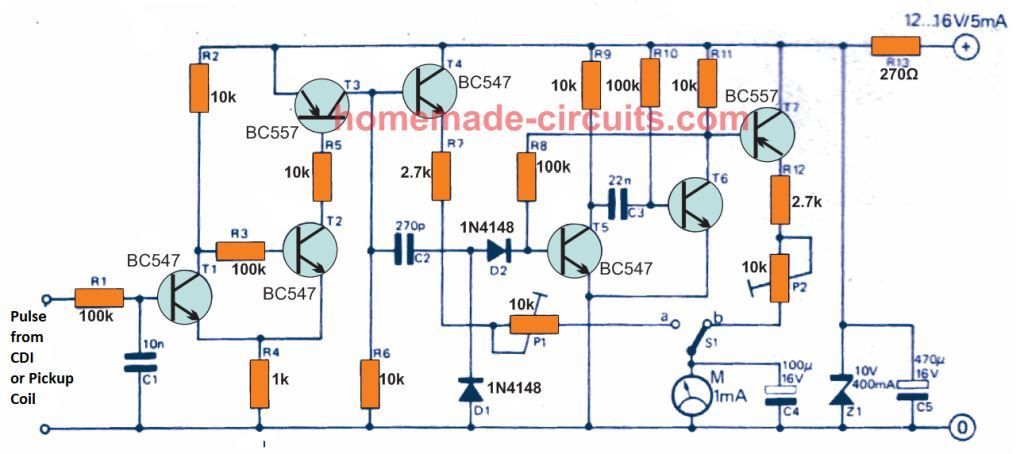
Det følgende diagram repræsenterer et af systemets moduler, og der kræves derfor to eller et par af sådanne moduler på tværs af højre og venstre side af køretøjet.
Ideen er enkel og fungerer uden mikrocontroller og uden specielle motordriver-IC'er. Det betyder, at du kan klare det uden nogen form for kodning og uden at bruge nogen form for kompleks IC-motordriver ..... og kredsløbet giver dig mulighed for at bruge enhver DC-motor uanset dens effekt, så selv højeffektiv hindring, der undgår køretøjer, kan være lavet ved hjælp af dette kredsløb, som normalt bruges i indkøbscentre og lignende butikker.
Kredsløbsdiagram

Lad os nu prøve at forstå ovenstående kredsløb ved hjælp af følgende forklaring:
Hvordan det virker
IC 555 er konfigureret som en IR-sender og er indstillet til at generere en konstant 38 kHz frekvens, mens det tilstødende transistoriserede kredsløb er konfigureret som modtagertrin eller IR-sensortrin.
Lad os antage, at det er højre sidemodul, og antag, at dette modul tilfældigvis er den første til at opdage en hindring i stien.
Så snart en forhindring detekteres, reflekteres 38 kHz frekvensen genereret af 555 IC mod sensoren i det tilstødende modtagerkredsløb.
Modtageren aktiverer øjeblikkeligt de tilknyttede transistorer, således at den endelige drivertransistor forhindres i at lede.
Nu skal motoren, der styres af denne transistor, være placeret på venstre side af køretøjet, det vil sige på den modsatte side af dette modul ... ligeledes styres motoren placeret på højre side faktisk af det venstre modul .
Når ovennævnte antagne forhindringsdetektormodul aktiveres, stopper det derfor venstre motor, mens højre motor får lov til at bevæge sig normalt.
Denne situation resulterer i, at køretøjet bliver tvunget til at tage en venstre afledning ... hvilket betyder, at det antagne venstre modul nu begynder at få endnu stærkere forhindringssignaler og fortsætter med at tvinge køretøjet til at fortsætte hårdere ved den igangværende omdirigering, indtil det helt har undgået hindringen . Modulet holder nu op med at modtage forhindringssignalerne, og køretøjet begynder normalt at bevæge sig fremad på sin nye sti.
Mens ovenstående omdirigering udføres, tvinges venstre sidemodul til at blive mere og mere isoleret og væk fra forhindringen, så det ikke får mulighed for at blande sig i proceduren og tillade en ren og jævn afledning af køretøjet.
Præcis de samme procedurer er implementeret i tilfælde af, at venstre sidemodul tilfældigvis fornemmer hindringen foran højre sidemodul, hvor køretøjet tvinges til at bevæge sig hårdere og hårdere mod højre side.
Vi kan også se et 'deaktiverende' kredsløbstrin i modulet, som er sammenkoblet på tværs af venstre og højre moduler. Dette trin introduceres med vilje for at sikre, at begge moduler aldrig aktiveres sammen.
Derfor, hvis f.eks. Venstre sidemodul bliver den første til at opdage en forhindring, deaktiverer det straks højre sidemodul og initierer omdirigering af køretøjet til højre og omvendt.
Sensoren IC kan være en standard TSOP17XX-serien
For mere info om ovenstående sensor IC kan du lære hvordan man tilslutter TSOP1738 IC
Og motoren skal være udstyret med gearkasser, så bevægelsen oprindeligt opretholdes på et kontrolleret niveau.
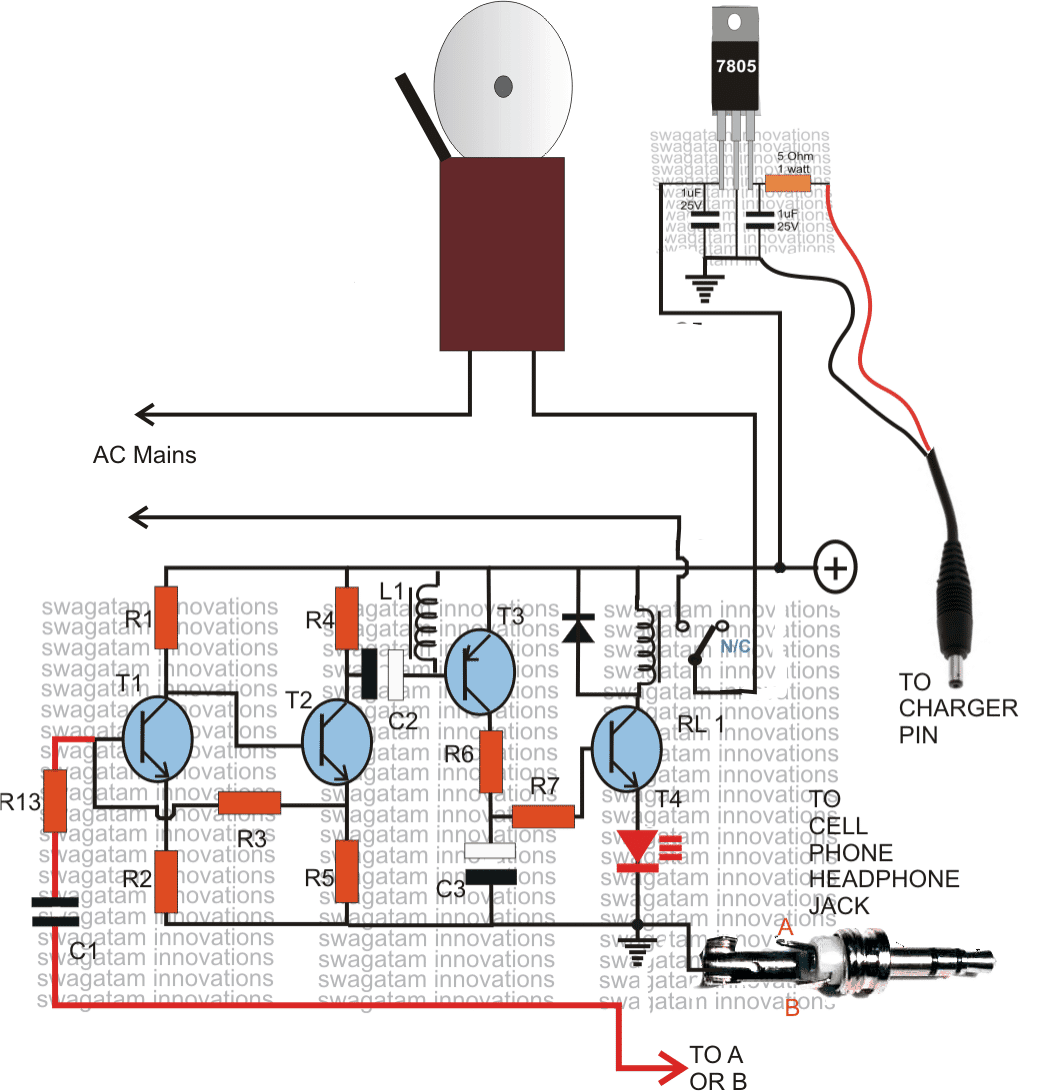
Hjulopsætning
Den komplette opsætning af venstre og højre modul og de tilhørende elektriske forbindelser kan ses i nedenstående figur:

Opdatering
En lille tænkning fortæller os, at ovennævnte enkle hindring, der undgår robotkredsløb, også kunne implementeres ved hjælp af et enkelt modul i stedet for de to.
Imidlertid vil et enkelt modul tillade køretøjet at udføre en ensidig omdirigering hver gang det registrerer en forhindring, og derfor kunne systemet konfigureres til enten at tage en retning med uret eller mod uret, afhængigt af hvilken motor der er forbundet med kredsløbet til handlingerne.
Eksempelopsætningen kan visualiseres i følgende billede:

Det ser imidlertid ud til, at der er et problem med ovenstående enkeltmotoropsætning. Hvis formoder, at køretøjet støder på et retvinklet hjørne på venstre side. Dette vil tvinge køretøjet til at bevæge sig mod uret, indtil det tager en U-drejning, og begynder at bevæge sig tilbage i samme retning, hvorfra det var startet. Dette er ikke noget, som brugeren ville sætte pris på.
Tidligere: SMD-modstande - introduktion og arbejde Næste: Sådan fungerer et accelerometer