En robot er et mekanisk eller virtuelt kunstigt middel, generelt en elektromekanisk maskine, der styres af et computerprogram ved hjælp af elektroniske kredsløb . Robotter kan være autonome eller semi-autonome og spænder fra humanoider som Hondas er det avancerede trin i innovativ mobilitet og TOSY'er. TOSY Ping Pong Playing Robot til industrielle robotter, patentassisterende robotter, medicinske driftsrobotter, hundeterapirobotter, kollektivt programmerede sværmrobotter og endda mikroskopiske nanorobotter. Ved at repræsentere et liv som et udseende eller automatisere bevægelser, kan en robot overføre en følelse af intelligens eller gennem sig selv. Denne artikel diskuterer IR-sensorbaserede trådløse robotbiler.
Hvad er et trådløst robotkøretøj?
Det robot er en teknologi der beskæftiger sig med design, konstruktion, drift og anvendelse af robotter såvel som computersystemer, bruges til at kontrollere, sensorisk feedback og informationsbehandling kaldes robotter. Denne teknologi beskæftiger sig med automatiserede maskiner, der kan placeres af mennesker i farlige omgivelser eller ligne mennesker i udseende, adfærd. I dag er robotter inspireret af naturen, der bidrager til området bio-inspireret robotik. Disse robotter skabte også en ny gren af robotik og blød robotik. De mekaniske teknikker, der er udviklet gennem den industrielle tidsalder, er der mere praktiske anvendelser såsom automatiserede maskiner, fjernbetjening og trådløs fjernbetjening.

Trådløst robotkøretøj
Hvad er en IR-sensor?
En IR-sensor er en enhed, der udsender for at fornemme nogle aspekter af omgivelserne, der registrerer IR-stråling, der falder på den. Emitteren er simpelthen en IR-LED ( Lysdiode ) og detektoren er simpelthen en IR-fotodiode, der er følsom over for IR-lys med samme bølgelængde, der udsendes af IR-LED'en. Når IR-lys falder på fotodioden, ændres modstandene og udgangsspændingerne i forhold til størrelsen på det modtagne IR-lys. Der er mange typer IR-sensorer, der er bygget og kan bygges afhængigt af applikationen. Kontrastsensorer (bruges i Linje, der følger robotter ), Nærhedsfølere (bruges i berøringsskærmstelefoner) og forhindringssensorer (bruges til tælling af varer og i tyverialarmer) er nogle eksempler.

IR-sensor
Radiofrekvens Fjernstyret trådløs robot
Det RF-kontrollerede trådløse robotkøretøj inkluderer hovedsageligt en RF-sender og RF-modtager.
RF-sender
RF-moduler har normalt en meget lille størrelse og fungerer i spændingsområdet fra 3V til 12V. RF-sendermoduler er designet til kun at fungere med 433MHz frekvens. Hvis der sendes logisk nul, trækkes der ikke strøm fra senderen. Til transmission er logik en, den bruger strøm omkring 4,5 mA med 3V. Senderen og modtageren har interfacet med 8051 mikrokontroller og få den ønskede operation. RF-transmitter har leveret spænding i området 3V til 6V og udgangseffekt i området 4V til 12V.

RF-sender
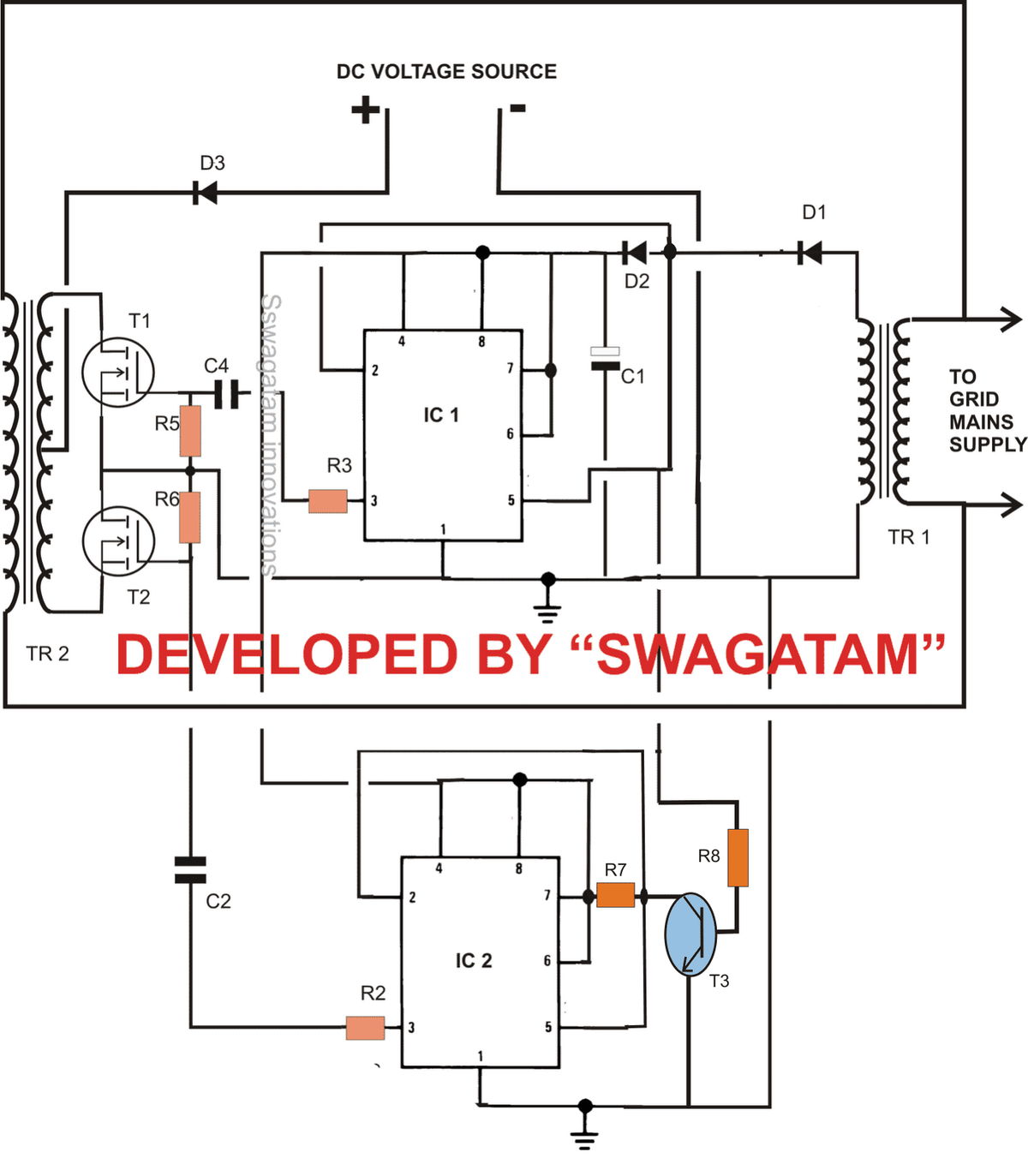
RF-transmitterens kredsløbsdiagram er vist nedenfor bruges til at forbinde forskellige trykknapper til at flytte robotkøretøjet i forskellige retninger som fremad, bagud, højre og venstre. Ved at trykke på den relevante trykknap kan vi således styre robotkøretøjets bevægelse.
RF-modtager
RF-modtager er også lille i størrelse, og RF-modtager har en strømforsyning på 3,5 mA med en driftsspænding på 5 V. RF-sendermoduler er kun designet til at arbejde med 433MHz (der skal kommunikere med senderfrekvensen til kommunikationsformål for at modtage signaler fra senderen).

RF-modtager
RF-kommunikation ved hjælp af robotkøretøjet
Radiofrekvens (RF) består af en sender og en modtager, der er forbundet til et isoleret kredsløb, der skal styres. Et styresignal overføres fra senderenden i form af radiobølger eller elektromagnetiske bølger, således at fjernstyring af enheden, som er forbundet til modtagerenden. Dette styresignal transmitteres ved hjælp af elektromagnetiske bølger eller radiobølger med radiofrekvens. Således modtages styresignalet i modtagerenden og får den nøjagtige udgang, såsom et robotkøretøj, en robot til specielle formål, en enhed til kommunikationsformål osv.
RF-styret robotkøretøj
Hovedmålet med dette projekt er at designe et robotkøretøj, der styres af en tv-fjernbetjening. Her bruger det foreslåede system RF-teknologi til fjernbetjening. En IR-sensor er grænseflade til robotens styreenhed til at detektere de infrarøde signaler, der transmitteres af fjernbetjeningen. En 8051-serie af mikrocontroller bruges til den foretrukne operation.
Ved afsendelsessektionen (TX) bruges trykknapper til at sende kommandoerne til modtagerenden for at kontrollere robotens bevægelse, enten til at bevæge sig i fire retninger som fremad, højre, bagud og venstre osv. Ved modtagelsessektionen har to motorer grænseflade med 8051-familiens mikrokontroller, hvor de bruges til køretøjets bevægelse.

IR-sensorbaseret trådløst robotkitprojektsæt
Tv-fjernbetjeningen genererer RC5-baserede data, der modtages af en infrarød modtager, der er grænseflade med mikrokontrolleren. Det indbyggede program i mikrocontrolleren henviser til koden for at producere foretrukket output baseret på i / p-data til at fungere motorerne via en motordriver-IC.
RF-senderen fungerer som en RF-fjernbetjening, der har fordelen af rigelig rækkevidde (op til 200 meter) med en passende antenne, mens modtageren afkoder, før den leveres til en anden mikrocontroller til køre jævnstrømsmotorer gennem motorchauffør IC til krævet arbejde.
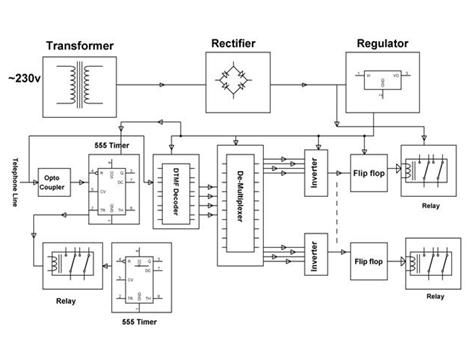
Yderligere kan dette projekt forbedres ved hjælp af DTMF-teknologi . Ved hjælp af RF-teknologi kan vi styre robotten ved hjælp af en mobiltelefon. Denne teknologi har en fordel i forhold til langt kommunikationsområde sammenlignet med RF-teknologi.
Således handler alt om IR-sensorbaserede trådløse robotbiler. Vi håber, at du har fået en bedre forståelse af dette koncept. Desuden er enhver tvivl om dette koncept eller elektriske og elektroniske projekter , giv venligst din feedback i kommentarfeltet nedenfor. Her er et spørgsmål til dig, hvad er IR-sensorens hovedfunktion?