
I databehandling kan CAN-grænsefladen være en delt grænse på tværs af de to separate dele af en systemkonversationsinformation. Samtalen kan foregå mellem computerhardware, software, mennesker, perifere enheder og kombinationer af disse. Nogle hardwareenheder på en computer som en berøringsskærm, fordi en berøringsskærm kan dele og modtage information gennem grænsefladen, mens andre enheder som en mikrofon, mus er kun en måde. Grænseflader er hovedsageligt i to typer såsom interface til hardware og interface til software. Hardware-grænseflader bruges i mange af enhederne som input, output-enheder, busser og lagerenheder. Dette CAN-interface kan defineres af de logiske signaler. En softwaregrænseflade kan være tilgængelig i en bred vifte på forskellige niveauer. Et operativsystem kan interface med forskellige dele af hardwaren. Programmerne eller applikationerne på OS skal muligvis kommunikere gennem streams og i objektorienteret programmering skal objekter i enhver applikation kommunikere gennem metoder.

KAN BUS
CAN-bussen blev udviklet i 1983 hos Robert Bosch GmbH. Denne protokol blev frigivet i år 1986 på SAE Congress (Society of Automobile Engineers) i Detroit, Michigan. Den første CAN-protokol blev produceret af Philips og Intel og udgivet på markedet i år 1987. Men BMW-serien-8 var det første køretøj, der havde et CAN-protokolbaseret multiplex-ledningsnet.

KAN BUS
Den fulde form af CAN er et reguleringsnetværk . Det er en slags køretøjsbus, der hovedsagelig er designet til at tillade forskellige enheder og mikrokontroller at interagere med hinanden uden en værtscomputer. Denne protokol er baseret på en besked og er hovedsageligt designet til elektriske ledninger i biler. Bosch udgav forskellige versioner af CAN, og i år 1991 blev den nyeste CAN 2.0 offentliggjort.
CAN består af to dele, hovedsagelig som del A og del B, hvor del A er en 11-bit-identifikator, og den er i standardformat. Del B er en 29 bit-identifikator, og den er i det udvidede format. En CAN, der bruger 11-bit-identifikatorer, kaldes AN 2.0A, og en CAN, der bruger 29-bit-identifikatorer, kaldes CAN 2.0B
Grænseflade mellem CAN og USB
Interfacing af CAN til USB er en enkel enhed, der bruges til at overvåge CAN-bussen. Denne enhed bruger NUC140LC1CN 32 K Cortexes-M0 mikroprocessor. Den har både CAN- og USB-periferiudstyr.
De vigtigste funktioner i grænsefladen CAN til USB er
- Det er meget simpelt at designe
- Godt matchet med protokollen LAWICEL CANUSB
- At eksponere sig som en enhed som FTDI USB
- Det understøtter CAN 2.0B 29-bit og CAN 2.0A 11-bit rammer
- Den består af en intern meddelelsesbuffer (FIFO CAN)
- Den får strøm fra USB-port
- Til firmwareopdateringer anvendes en masselagerenhed (Flash-resident USB)
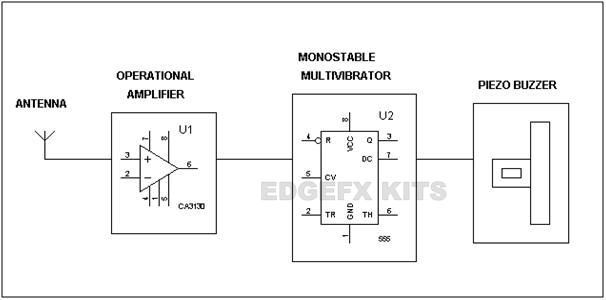
Skematisk diagram
Kredsløbskonfigurationen af grænsefladen mellem CAN og USB er vist nedenfor. En CAN-transformer bruges til at gøre det muligt for NUC140 CAN-enheden at interagere med CAN-bussen. Chippen TJA1051T løser formålet fra NXP. Mikroprocessoren NUC140 er i stand til at arbejde med en 5V strømforsyning.Der er ikke behov for en ekstra 3,3V spændingsregulator. Dette praktiske arrangement gør en enkel opgave med implementering af CAN til USB-interface.

Skematisk diagram
Kredsløbet er bygget med tre status-lysdioder, nemlig D1, D2 og D3.
- Her siger status for D1-dioden, at USB er tilsluttet værten
- Her siger status for D2-dioden, at aktiviteten af CAN-bus
- Fejlene i CAN-bussen kan angives med D3-diode
NUC140 mikroprocessoren har ikke en integreret boot loader, og den bedste måde at programmere bruges kun på Nuvoton ICP-programmør og ARM SWD-interface (Serial Wire Debug). Hvis boot loader tidligere er dumpet med et program, kan den udløses. Tilslutning af JP1, før interface tilsluttes, udløser boot loader.
Boot Loader
Flashhukommelsen til NUC140LC1-mikroprocessoren er opdelt i to sektioner. De udfører brugerprogrammekode og boot loader. Størrelsen på boot loader og udførelse af brugerprogram er 4K og 32K. Her bruges masselagringsenheden (MSD) boot loader fra Nuvoton til at opbygge en fuldt funktionel USB boot loader. Boot loader aktiveres ved at forbinde en JP1-jumper. Så endelig skal et flytbart drev være synligt i værtsfilsystemet med en 32 KB størrelse. Kopier og indsæt opdateringen af CAN til USB-firmware til boot loader-drevet. Frakobl USB-kablet, tag jumperen ud, og sæt den i igen. Opdateringen af ny firmware skal nu køre.

Boot Loader
Programmering af CAN til USB-interface og NuTiny-SDK-140
Programmering af mikroprocessor NUC140 har brug for Nuvoton ICP programmeringsapplikation og Nuvotons Nu-Link programmør. Men her er NuTiny-SDK-140 (NUC140 demo-kort) tilgængelig fra Digi-Key. Den består af to dele som Nu-Link-programmører og den del med NUC140-chip. Dette kort er endda perforeret for at adskille den del af Nu-Link. Faktisk kan du designe denne enhed udelukkende omkring NUC140-demo-kortet, den eneste en ekstra CAN-transceiverchip er nødvendig.

NUC140-kort
Således handler det kun om CAN-interface med USB inkluderer, CAN-bus, interface mellem CAN og USB, skematisk diagram, boot loader og NUC140 mikroprocessor. Vi håber, at du har fået en bedre forståelse af dette koncept. Desuden giver eventuelle spørgsmål vedrørende denne artikel dine værdifulde forslag ved at kommentere i kommentarfeltet nedenfor. Her er et spørgsmål til dig, hvad er anvendelserne af CAN interface?
Fotokreditter:
- CAN til USB-interface saelig
- KAN BUS canbuskit
- NUC140 instruktioner








{kind=link}
{kind=link}
{kind=link}