Artiklen diskuterer et simpelt infrarødt (IR) fjernbetjeningskredsløb, der er konfigureret til at betjene en jævnstrømsmotor som reaktion på skiftet fra et standard IR-fjernbetjening, såsom en tv-fjernbetjening eller en dvd-fjernbetjening.
Den tilsluttede motor kan bevæges på begge måder og kan også bringes til at standse.
Kredsløbet kan forstås med følgende forklaringer:
Hvordan det virker
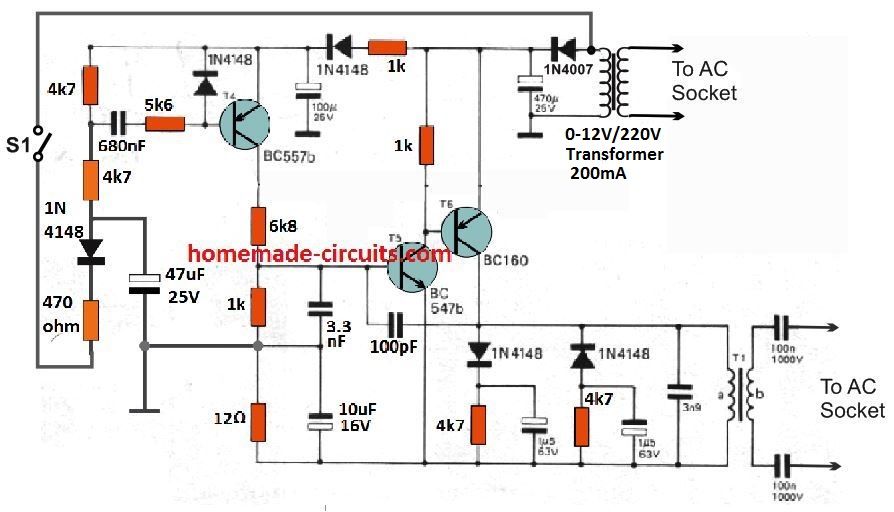
Som det kan ses i det givne kredsløbsdiagram, er sensoren et hvilket som helst standard trebenet IR-sensormodul, som typisk vil svare på ethvert TV IR-fjernbetjening.
Når en IR (infrarød) stråle er fokuseret på sensoren, bliver stiften, der betegnes som output, logisk lav. Denne situation vedvarer, så længe bjælken forbliver fokuseret på den.
Transistoren T1, som er en PNP, reagerer på dette logiske lave signal og udfører kobling af det tilsluttede relæ RL1.
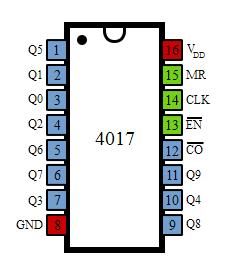
Kontakterne forbinder øjeblikkeligt det øjeblikkelige positive potentiale ved transistorens kollektor til pin nr. 14 på IC1, som er kablet som et flip-flop-kredsløb.
Hvis vi antager, at den indledende logiske sekvens er ved pin nr. 3 på IC'en, skifter ovenstående triggering sekvensen til pin nr. 2 på IC, hvilket gør den høj.
Dette tænder T2 og det tilsvarende relæ RL2.
RL2 leder og forbinder motorens særlige ledning til negativ forsyning. Da motorens anden terminal får et positivt resultat af RL3, begynder den at bevæge sig i den indstillede retning.
Antag nu, at sensoren får en efterfølgende trigger gennem IR-fjernbetjeningen, ovenstående proces gentages, og udgangssekvensen skifter fra pin nr. 2 til pin nr. 4 i IC1, som øjeblikkeligt tænder T3, mens den slukkes for T2.
Ovenstående handling vender relæforbindelserne tilbage, hvilket tvinger motoren til straks at vende sin rotationsretning.
Med en anden efterfølgende trigger fra fjernbetjeningen hopper sekvensen tilbage til pin # 3, som ikke er forbundet til noget og resulterer i, at motoren slukkes helt.
Inkluderingen af L1, C1 sikrer, at kredsløbene ikke påvirkes med falsk udløsning af sensoren.
L1 kan eksperimenteres for at få den optimale værdi, så den kun ”begrunder” utilsigtede omstrejfende eksterne signaler og ikke de faktiske IR-signaler fra et fjernbetjeningshåndsæt.


Deleliste til ovenstående IR (infrarød) fjernstyret motorkreds.
R1 = 100 ohm,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22 uF
C5 = 1000uF / 25V
C6 = 0,22 uF
L1 = 100 mH choker
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Alle relæer = 12V / 400 ohm / SPDT
sensor = TSOP1738
Motor = 12V jævnstrømsmotor
Tidligere: Brug af en NTC-termistor som en overspændingsdæmper Næste: MJE13005 kompakt 220V strømforsyningskredsløb