Det foreslåede soloptimeringskredsløb kan bruges til at få den størst mulige effekt med hensyn til strøm og spænding fra et solpanel som reaktion på de forskellige sollysforhold.
Et par enkle, men alligevel effektive solcelleoptimeringsopladerkredse forklares i dette indlæg. Den første kan bygges ved hjælp af et par 555 IC'er og et par andre lineære komponenter, den anden optin er endnu enklere og bruger meget almindelige IC'er som LM338 og op amp IC 741. Lad os lære procedurerne.
Kredsløbsmål
Som vi alle ved, bliver det muligt at opnå den højeste effektivitet fra enhver form for strømforsyning, hvis proceduren ikke indebærer at skifte strømforsyningsspændingen, hvilket betyder, at vi ønsker at erhverve det særlige krævede lavere niveau af spænding og maksimal strøm for den belastning, der er betjenes uden at forstyrre kildens spændingsniveau og uden at generere varme.
Kort fortalt skal en berørt soloptimeringsværktøj tillade sin output med den maksimale krævede strøm, hvilket som helst lavere niveau af krævet spænding, men alligevel sørge for, at spændingsniveauet over panelet forbliver upåvirket.
En metode, der diskuteres her, involverer PWM-teknik, der kan betragtes som en af de optimale metoder til dato.
Vi skal være taknemmelige for dette lille geni kaldet IC 555, som får alle svære begreber til at se så lette ud.
Brug af IC 555 til PWM-konvertering
Også i dette koncept inkorporerer vi og er stærkt afhængige af et par IC 555'er til den nødvendige implementering.
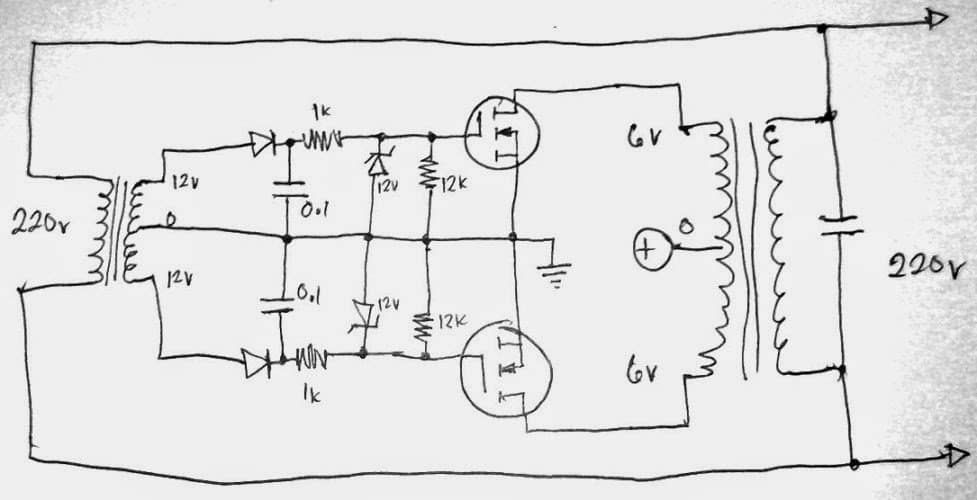
Når vi ser på det givne kredsløbsdiagram, ser vi, at hele designet grundlæggende er opdelt i to faser.
Det øverste spændingsreguleringstrin og det nedre PWM-generatorstrin.
Det øverste trin består af en p-kanal mosfet, der er placeret som en switch og reagerer på den anvendte PWM-info ved porten.
Det nederste trin er et PWM-generator-trin. Et par 555 IC'er er konfigureret til de foreslåede handlinger.
Sådan fungerer kredsløbet
IC1 er ansvarlig for at producere de krævede firkantbølger, som behandles af den konstante strøm, trekantbølgenerator, der omfatter T1 og de tilknyttede komponenter.
Denne trekantede bølge påføres IC2 til behandling til de krævede PWM'er.
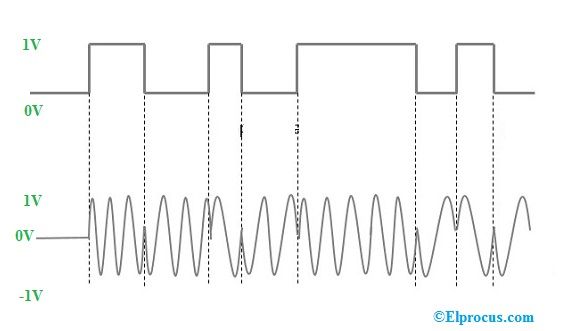
Imidlertid afhænger PWM-afstanden fra IC2 af spændingsniveauet ved dens pin # 5, som er afledt af et resistivt netværk på tværs af panelet via 1K-modstanden og 10K-forudindstillingen.
Spændingen mellem dette netværk er direkte proportional med de forskellige panel volt.
Under spidsbelastninger bliver PWM'erne bredere og omvendt.
Ovenstående PWM'er påføres mosfetporten, der leder og tilfører den krævede spænding til det tilsluttede batteri.
Som tidligere diskuteret genererer panelet under spids solskin højere spændingsniveau, højere spænding betyder IC2, der genererer bredere PWM'er, hvilket igen holder mosfe slukket i længere perioder eller tændt i relativt kortere perioder svarende til en gennemsnitlig spændingsværdi, der muligvis være lige omkring 14,4 V på tværs af batteripolerne.
Når solen skinner forværres, får PWM'erne forholdsmæssigt snævert afstand, så mosfet kan lede mere, så den gennemsnitlige strøm og spænding over batteriet har tendens til at forblive på de optimale værdier.
10K-forudindstillingen skal justeres til at komme omkring 14,4V over udgangsterminalerne under stærkt solskin.
Resultaterne kan overvåges under forskellige sollysforhold.
Det foreslåede solpaneloptimeringskredsløb sikrer en stabil opladning af batteriet uden at påvirke eller shunt panelspændingen, hvilket også resulterer i lavere varmeproduktion.
Bemærk: Det tilsluttede svævepanel skal kunne generere 50% mere spænding end det tilsluttede batteri ved maksimalt solskin. Strømmen skal være 1/5 af batteriets AH-klassificering.

Sådan opsættes kredsløbet
- Det kan gøres på følgende måde:
- Hold oprindeligt S1 slået fra.
- Udsæt panelet for maksimalt solskin, og juster forudindstillingen for at få den krævede optimale opladningsspænding over mosfet-afløbsdiodeudgang og jord.
- Kredsløbet er klar nu.
- Når dette er gjort, skal du tænde S1, batteriet begynder at blive opladet i den bedst mulige optimerede tilstand.
Tilføjelse af en aktuel kontrolfunktion
En omhyggelig undersøgelse af ovenstående kredsløb viser, at når mosfet forsøger at kompensere for det faldende panels spændingsniveau, giver det batteriet mulighed for at trække mere strøm fra panelet, hvilket påvirker panelspændingen og taber det længere nede, hvilket fremkalder en run-away situation, dette kan alvorligt hindre optimeringsprocessen
En strømstyringsfunktion som vist i det følgende diagram tager sig af dette problem og forbyder batteriet at trække for stor strøm ud over de angivne grænser. Dette hjælper igen med at holde panelspændingen upåvirket.
RX, som er den nuværende begrænsende modstand, kan beregnes ved hjælp af følgende formel:
RX = 0,6 / I, hvor I er den specificerede mindste ladestrøm for det tilsluttede batteri

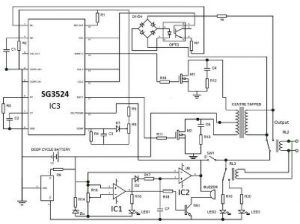
En rå, men enklere version af det ovennævnte forklarede design kan bygges som foreslået af Mr. Dhyaksa ved hjælp af pin2 og pin6 tærskelregistrering af IC555, hele diagrammet kan ses nedenfor:

Ingen optimering uden en Buck Converter
Ovennævnte forklarede design fungerer ved hjælp af et grundlæggende PWM-koncept, som automatisk justerede PWM i et 555-baseret kredsløb som reaktion på den skiftende solintensitet.
Selvom output fra dette kredsløb producerer et selvjusterende svar for at opretholde en konstant gennemsnitsspænding ved udgangen, justeres spidsen aldrig, hvilket gør det betydeligt farligt for opladning af Li-ion- eller Lipo-batterier.
Desuden er ovenstående kredsløb ikke udstyret til at konvertere den overskydende spænding fra panelet til en proportional strømmængde for den tilsluttede nominelle belastning med lavere spænding.
Tilføjelse af en Buck Converter
Jeg forsøgte at rette op på denne tilstand ved at tilføje et buck converter-trin til ovenstående design og kunne producere en optimering, der lignede meget et MPPT-kredsløb.
Men selv med dette forbedrede kredsløb kunne jeg ikke være helt overbevist om, hvorvidt kredsløbet virkelig var i stand til at producere en konstant spænding med nedskåret peak-niveau og en boostet strøm som reaktion på de forskellige solintensitetsniveauer.
For at være helt selvsikker med hensyn til konceptet og eliminere alle forvirringer måtte jeg gennemgå en udtømmende undersøgelse af buck-konvertere og det involverede forhold mellem input / output spændinger, strøm og PWM-forhold (duty cycle), som inspirerede mig til at oprette følgende relaterede artikler:
Hvordan Buck Converters fungerer
Beregning af spænding, strøm i en spændeinduktor
De afsluttende formler opnået fra de ovennævnte to artikler hjalp med at afklare alle tvivl, og til sidst kunne jeg være helt sikker på mit tidligere foreslåede soloptimeringskredsløb ved hjælp af et bukkeomformerkredsløb.
Analyse af PWM-driftscyklusbetingelse for designet
Den grundlæggende formel, der gjorde tingene tydeligt klare, kan ses nedenfor:
Vout = DVin
Her er V (in) den indgangsspænding, der kommer fra panelet, Vout er den ønskede udgangsspænding fra bukkeomformeren, og D er driftscyklussen.
Fra ligningen bliver det tydeligt, at Vout simpelthen kan skræddersys ved 'enten' at styre driftscyklussen for bukkeomformeren eller Vin ... eller med andre ord, Vin og driftscyklusparametrene er direkte proportionale og påvirker hinanden værdier lineært.
Faktisk er udtrykkene ekstremt lineære, hvilket gør dimensioneringen af et soloptimeringskredsløb meget lettere ved hjælp af et bukkeomformerkredsløb.
Det antyder, at når Vin er meget højere (@ peak sunshine) end belastningsspecifikationerne, kan IC 555-processoren gøre PWM'erne forholdsmæssigt smallere (eller bredere for P-enhed) og påvirke Vout'en til at forblive på det ønskede niveau og omvendt som solen mindskes, kan processoren udvide (eller indsnævre for P-enhed) PWM'erne igen for at sikre, at udgangsspændingen opretholdes på det specificerede konstante niveau.
Evaluering af PWM-implementeringen gennem et praktisk eksempel
Vi kan bevise ovenstående ved at løse den givne formel:
Lad os antage, at toppanelspændingen V (in) er 24V
og PWM skal bestå af 0,5 sek ON-tid og 0,5 sec OFF-tid
Driftscyklus = Transistor On time / Pulse ON + OFF time = T (on) / 0.5 + 0.5 sec
Arbejdscyklus = T (til) / 1
Derfor erstatter vi ovenstående i nedenstående formel får vi,
V (ud) = V (ind) x T (til)
14 = 24 x T (til)
hvor 14 er den antagne krævede udgangsspænding,
derfor,
T (til) = 14/24 = 0,58 sekunder
Dette giver os transistorens ON-tid, der skal indstilles til kredsløbet under peak solskin for at producere den krævede 14v ved udgangen.
Hvordan det virker
Når ovenstående er indstillet, kan resten overlades til IC 555 til at behandle de forventede selvjusterende T (til) perioder som reaktion på det faldende solskin.
Nu når solskinnet aftager, vil ovenstående ON-tid øges (eller formindskes for P-enhed) forholdsmæssigt af kredsløbet på en lineær måde for at sikre en konstant 14V, indtil panelspændingen virkelig falder ned til 14V, når kredsløbet bare kunne lukke procedurerne.
Den aktuelle (amp) parameter kan også antages at være selvjusterende, hvilket altid forsøger at opnå (VxI) produktkonstant i hele optimeringsprocessen. Dette skyldes, at en buck-konverter altid skal konvertere højspændingsindgangen til et forholdsmæssigt øget strømniveau ved udgangen.
Stadig hvis du er interesseret i at blive fuldstændig bekræftet med hensyn til resultaterne, kan du henvise til følgende artikel for de relevante formler:
Beregning af spænding, strøm i en spændeinduktor
Lad os nu se, hvordan det endelige kredsløb designet af mig ser ud fra følgende info:

Som du kan se i ovenstående diagram, er det grundlæggende diagram identisk med det tidligere selvoptimerende solopladerkredsløb, undtagen inkluderingen af IC4, der er konfigureret som en spændingsfølger og erstattes i stedet for BC547 emitterfølger-trin. Dette gøres for at give et bedre svar på IC2 pin # 5 kontrol pinout fra panelet.
Sammenfatning af den grundlæggende funktion af Solar Optimizer
Funktionen kan revideres som angivet under: IC1 genererer en firkantbølgefrekvens ved ca. 10 kHz, som kunne øges til 20 kHz ved at ændre værdien af C1.
Denne frekvens føres til pin2 i IC2 til fremstilling af hurtige skiftende trekantsbølger ved pin # 7 ved hjælp af T1 / C3.
Panelspændingen justeres hensigtsmæssigt af P2 og føres til IC4-spændingsfølger-trin til tilførsel af stift nr. 5 på IC2.
Dette potentiale ved pin nr. 5 i IC2 fra panelet sammenlignes med pin nr. 7 hurtige trekantbølger til oprettelse af de tilsvarende dimensionerede PWM-data ved pin nr. 3 i IC2.
Ved maksimal solskin justeres P2 passende, så IC2 genererer de bredest mulige PWM'er, og når solskinnet begynder at aftage, bliver PWM'erne forholdsmæssigt smallere.
Ovenstående effekt tilføres til basen af en PNP BJT til invertering af responset hen over det vedhæftede bukkeomformertrin.
Implicerer, at de bredere PWM'er, når det er mest solskin, tvinger PNP-enheden til at lede lidt {reduceret T (på) tidsperiode}, hvilket får smallere bølgeformer til at nå induktoren ... men da panelspændingen er høj, er indgangsspændingsniveauet {V (in)} at nå buckinduktoren er lig med panelets spændingsniveau.
I denne situation er buck-konverteren ved hjælp af det korrekt beregnede T (til) og V (in) således i stand til at producere den korrekte krævede udgangsspænding til belastningen, som kunne være meget lavere end panelspændingen, men ved et forholdsvis forstærket strømniveau (amp).
Nu når solen skinner falder, bliver PWM'erne også smallere, hvilket gør det muligt for PNP T (on) at stige forholdsmæssigt, hvilket igen hjælper induktoren til at kompensere for det faldende solskin ved at hæve udgangsspændingen forholdsmæssigt ... strømmen (amp ) -faktoren reduceres nu forholdsmæssigt i løbet af handlingen og sørger for, at outputkonsistensen opretholdes perfekt af buck-konverteren.
T2 sammen med de tilknyttede komponenter danner det aktuelle begrænsningstrin eller fejlforstærkerstrinet. Det sørger for, at outputbelastningen aldrig får lov til at forbruge noget, der er højere end designets nominelle specifikationer, så systemet aldrig bliver raslet, og solpanelets ydeevne aldrig får lov til at afvige fra dets zone med høj effektivitet.
C5 vises som en 100uF kondensator, men for et forbedret resultat kan dette øges til 2200uF værdi, fordi højere værdier vil sikre bedre krusningsstrømstyring og glattere spænding for belastningen.
P1 er til justering / korrigering af opamp-udgangens forskydningsspænding, således at pin nr. 5 er i stand til at modtage perfekte nul volt i fravær af en solpanelspænding, eller når solpanelspændingen er under belastningsspændingsspecifikationerne.
L1-specifikationen kan tilnærmelsesvis bestemmes ved hjælp af informationen i den følgende artikel:
Sådan beregnes induktorer i SMPS-kredsløb
Solar Optimizer ved hjælp af op-forstærkere
Et andet meget simpelt, men alligevel effektivt soloptimeringskredsløb kan laves ved at anvende en LM338 IC og et par opamper.
Lad os forstå det foreslåede kredsløb (soloptimeringsapparat) ved hjælp af følgende punkter: Figuren viser et LM338 spændingsregulator kredsløb, som også har en strømstyringsfunktion, også i form af transistoren BC547 forbundet over IC's justerings- og jordstift.
Opamps bruges som komparatorer
De to opamper er konfigureret som komparatorer. Faktisk kan mange sådanne trin inkorporeres for at forbedre virkningerne.
I det nuværende design justeres A1s forindstilling nr. 3 således, at output fra A1 går højt, når solskinnets intensitet over panelet er ca. 20% mindre end topværdien.
Tilsvarende justeres A2-trinnet således, at dets output går højt, når solskinnet er ca. 50% mindre end spidsværdien.
Når A1-output går højt, udløser RL # 1 at forbinde R2 på linje med kredsløbet og afbryde R1.
Oprindeligt ved maksimal solskin giver R1, hvis værdi er valgt meget lavere, maksimal strøm til at nå batteriet.
Kredsløbsdiagram

Når solskin falder, falder panelets spænding også, og nu har vi ikke råd til at trække kraftig strøm fra panelet, fordi det ville bringe spændingen ned under 12V, hvilket måske helt stopper opladningsprocessen.
Relæskifte til aktuel optimering
Derfor, som forklaret ovenfor, kommer A1 i aktion og afbryder R1 og forbinder R2. R2 er valgt med en højere værdi og tillader kun en begrænset mængde strøm til batteriet, så solspændingen ikke går ned under 15 stemmer, et niveau, der er absolut nødvendigt ved indgangen til LM338.
Når solskinnet falder under den anden indstillede tærskel, aktiverer A2 RL # 2, som igen skifter R3 for at gøre strømmen til batteriet endnu lavere og sørge for, at spændingen ved indgangen til LM338 aldrig falder under 15V, men alligevel opladningshastigheden til batteriet holdes altid på det nærmeste optimale niveau.
Hvis opamp-trinene øges med flere antal relæer og efterfølgende aktuelle kontrolhandlinger, kan enheden optimeres med endnu bedre effektivitet.
Ovenstående procedure oplader batteriet hurtigt ved høj strøm under maksimale solskin og sænker strømmen, når solintensiteten over panelet falder og forsyner tilsvarende batteriet med den korrekte nominelle strøm, så det bliver fuldt opladet i slutningen af dagen.
Hvad sker der med et batteri, som muligvis ikke aflades?
Antag, at hvis batteriet ikke aflades optimalt for at gennemgå ovenstående proces næste morgen, kan situationen være fatalt for batteriet, fordi den oprindelige høje strøm muligvis har negative påvirkninger over batteriet, fordi det endnu ikke er afladet til det specificerede vurderinger.
For at kontrollere ovenstående problem introduceres et par flere opamper, A3, A4, som overvåger batteriets spændingsniveau og initierer de samme handlinger som udført af A1, A2, så strømmen til batteriet optimeres mht. spændingen eller det opladningsniveau, der findes i batteriet i denne periode.
Tidligere: Kommunal vandforsyningssensor controller kredsløb Næste: Tænd / sluk-alarm til alarm med automatisk OFF-kredsløb