Med udviklingen af teknologier, især inden for robotteknologi, er robotter dominerende i mange af applikationerne. Nogle af dem er af meget risikabel type og farlige områder. Militær- og slagmarkapplikationer øger nu deres brug af robotter i nogle vigtige og komplicerede opgaver. I en af mine artikler har jeg beskrevet brugen af robotter som spion i militære operationer. Hvad nu, hvis der er behov for forsvar af robotkøretøjet eller et angreb fra robotten? Det er her behovet for en robot indlejret med en angrebsmekanisme kommer. Et sådant eksempel er robotkøretøjet med en LASER-pistol.

RF-styret robotkøretøj med laserstråleindretning
En sådan robot bruges dybest set i militære operationer og også af trafikpolitiet til at registrere hastigheden på køretøjer i bevægelse.
Før vi går i detaljer om robotter med laserpistoler, lad os få en hurtig forståelse af LASER som et våben.
En LASER-stråle (Light Amplification by Stimulation Emission) er et ensrettet stærkt fokuseret lys i modsætning til det fra en simpel pære. Den består af synkroniserede trug og kamme, dvs. bølgerne forstyrrer ikke hinanden. Dette producerer et stærkt fokuseret lys med meget høj effekt i størrelsesordenen 1000 til 1 million gange større end et typisk pærelys. Det er en enhed, der styrer emissionerne og absorptionen af fotoner ved at pumpe tilstrækkelige mængder energi. I dette forstærkes fotonkilden til en lysstråle. Bølgelængden af disse lasere varieres i forskellige spektrum som synlig, infrarød og ultraviolet.
Princippet bag LASER drejer sig om tre ting, det er absorption, spontan emission og stimuleret emission. En tilstrækkelig mængde energi fra foton interagerer med atomet, hvilket får atom til at hoppe fra lavere energitilstand til højere energitilstand. Dette atom falder tilbage til den lavere energitilstand ved at udsende en foton kaldet spontan emission. I stimuleret emission er frigivelse af energi fra atomet ved kunstige midler. så fotonet interagerer med det ophidsede atom, har den samme energi og polarisering som den indfaldende foton.
Lad os nu se på robotens hardware-dele
- Grundlag: Basen på en sådan robot kan være enhver kubisk krop med hjul fastgjort til dens bevægelse.
- DC-motor: Robotten består af to jævnstrømsmotorer drevet af motordrivere og leverer krævet bevægelse til robotten.
- Styreenhed: Robotens bevægelse styres ved hjælp af et RF-kommunikationsmodul. Senderen består af trykknapper, mikrokontrollere, en dekoder og en RF-sender, mens modtagerenheden indlejret i robotten består af en indkoder og et RF-modtagermodul til at styre robotbevægelse .
- En LASER-pistol: En LASER-pistol er monteret på robotten, der udfører robotens hovedopgave.
Et smugkig ind i robotten, der arbejder
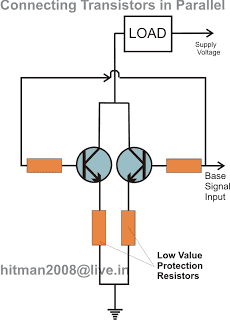
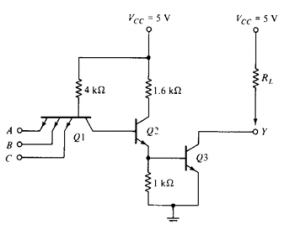
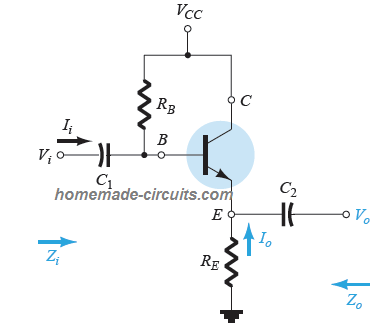
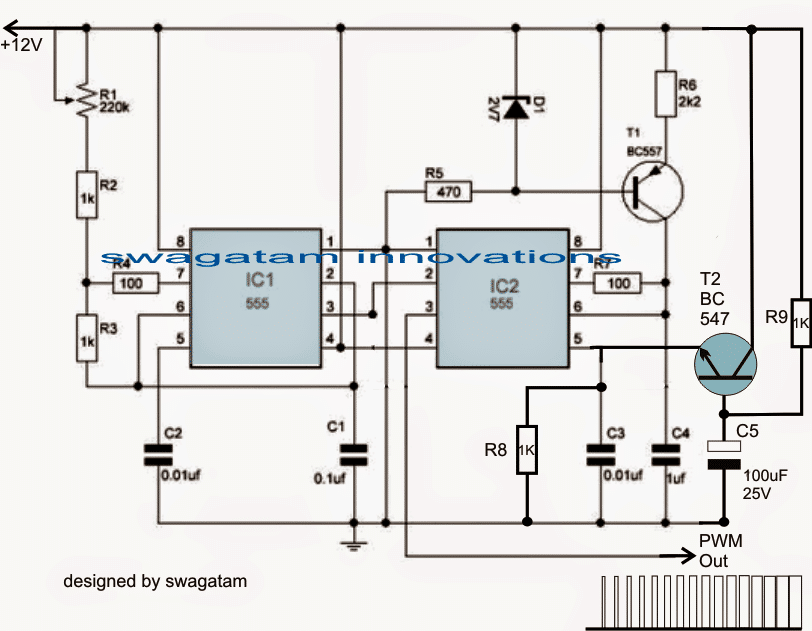
Robotten skyder en stærk lysstråle fra LASER-pistolen, mens den bevæger sig i den krævede retning, som enten kan skade målet eller bare producere et sted til at opdage målet. LASER'en skal drives af nogle energikilder. I et simpelt prototype-design ved hjælp af en grundlæggende LASER-pen drives enheden af en transistor, der fungerer som en switch. Transistoren modtager det lave logiske signal fra mikrocontrolleren og er i slukket tilstand, hvilket gør LASER-modulet direkte forbundet til 5 V-strømforsyningen.

Laserpistol drevet af transistor, der fungerer som en inverter
Styring af robotten
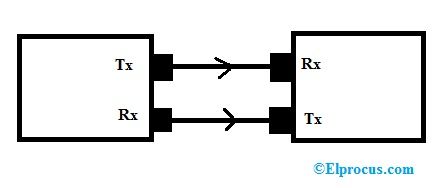
For at kontrollere robotens bevægelse skal motorernes drift kontrolleres. Dette kan gøres ved hjælp af en RF-styret drift af motordrivere. Kommandoerne transmitteres ved hjælp af en RF-sender på en afstandsenhed omkring 200 meter og modtages af RF-modtageren til at drive motorerne.
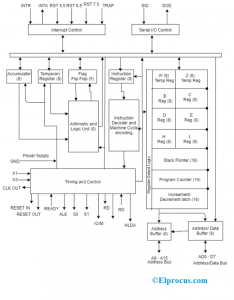
Senderenheden består af flere trykknapper, der fungerer som kommandokontakter for at bevæge robotten i den ønskede retning. Trykknapperne er grænseflade med mikrokontrolleren, der er programmeret til at sende data i parallel form baseret på trykknapindgangen, til koderen. Koderen konverterer disse parallelle data til seriel form, og disse serielle data transmitteres ved hjælp af RF-sendermodulet via en antenne.

Blokdiagram, der viser afsendersektionen
Modtagerenheden består af et RF-modtagermodul, der modtager det modulerede signal og demodulerer det. Dekoderen modtager det demodulerede signal i seriel form og konverterer det til den parallelle form. Mikrocontrolleren modtager signalerne og styrer motordriveren i overensstemmelse hermed. Motordriveren, der bruges i LM293D, som kan styre 2 motorer ad gangen.

Blokdiagram, der viser modtagersektion
Således ved hjælp af RF-kommunikation kan vi styre robotten.
I ovenstående beskrivelser har jeg givet en kort idé om en simpel prototype af et robotkøretøj med en LASER-stråle. I virkelige applikationer bruges normalt langtrækkende kommunikationssystemer som GSM eller DTMF til at styre robotten fra fjerntliggende steder.
3 Anvendelser af robotkøretøj med laserpistol:
- Målregistrering : Robotkøretøjet kan bruge LASER-strålen til at forårsage et sted på målet, så det er let synligt og kan målrettes. Et eksempel er den luftbårne LASER.
- Målødelæggelse : En stærk Laser stråle i størrelsesordenen 95 GHz frekvens kan forårsage en brændende fornemmelse i menneskekroppen, da den trænger ind i huden 1/64thpå en tomme, og strålenergien kan opvarme vandmolekylerne i kroppen. Et eksempel er Active Denial System udviklet af USA.
- Target Range Finder og hastighedsregistrering : LASER-strålen fra robotkøretøjet kan bruges til at finde målområdet efter princippet om LASER-lysrefleksion, og også målets hastighed kan beregnes, når vi kan nå rækkevidden.
Så nu har vi en kort idé om, at robotter brugte en måldetektor og ødelægger. Har det nogen brug for den normale offentlighed bortset fra militæret? Tænk og svar.