I den moderne verden robot vil spille en vigtig rolle . Hovedformålet med robotten er at mindske mandens magt. Robotterne bruges i elektronik i mange applikationer. I denne artikel har vi diskuteret, hvordan man bygger en robot med Arduino-modulet og 8051 mikrokontroller. For at bygge en robot med Arduino forklarer vi om arduino-robotten med forhindring af forhindringer. De nødvendige komponenter inkluderer robotlegeme, jævnstrømsmotor, ultralydssensor, Arduino-modul, motordriver-IC og Arduino-modul
Hvordan man bygger en robot?
Det nødvendige komponenter at bygge robotten inkluderer følgende
Robotkrop
Den grundlæggende robotlegeme af robotten til forhindring af forhindringer vises i det følgende billede. Robotkroppen er en plastikdel og indeholder hjul på begge sider. Foran robotlegemet er ultralydssensoren arrangeret. Ved hjælp af ultralydssensoren kan forhindringen registrere. Når robotten bevæger sig, hvis ultralydssensoren opdager nogen forhindring, bevæger robotten sig til side, og den fortsætter med at bevæge sig.

Robotkrop
DC-motor
Det DC-motor er en elektrisk motor og den kører på jævnstrøm. Driften af enhver elektrisk motor er baseret på elektromagnetisme. Magnetfeltet produceres af den strømførende leder, når det placeres i et eksternt magnetfelt, det vil opleve en kraft, der er proportional med strømmen i lederen. Generelt ved vi, at magneterne er modsat polaritetsattraktion fra nord til syd, og hvis polariteterne er de samme som nord til nord og syd mod syd, så magneterne frastøder.

DC-motor
Den interne konfiguration af jævnstrømsmotor er designet til at fastgøre den magnetiske interaktion mellem den strømførende leder og det eksterne magnetfelt for at frembringe bevægelsen. I dette bruger vi to jævnstrømsmotorer, hver motor indeholder 6v og de samlede to jævnstrømsmotorer indeholder 12v. De to jævnstrømsmotorer er placeret i robotlegemet, som vi kan se i det følgende billede. Robotkroppen flyttes ved hjælp af jævnstrømsmotorer

Robothus med jævnstrømsmotor
Arduino-modul
Det følgende billede viser arduino-modulbilledet. Det arduino-modul spiller en vigtig rolle i designet af hindringsundgåelsesrobotten ved hjælp af arduino-kit. Modtagerstiften på arduino er forbundet til den anden stift af ultralydssensoren, og den 1., 2. og 3. stift af arduino-modulet er forbundet til DC-motordriveren. De almindelige komponenter kondensator og diode er også forbundet til arduino-modulet ved hjælp af batteristrømforsyningen.

Arduino-modul
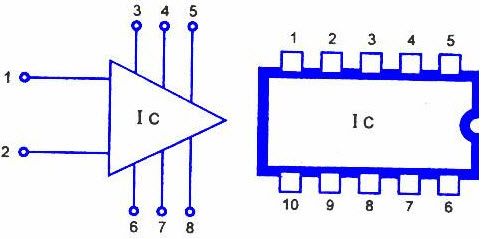
Motor Driver IC
At køre jævnstrømsmotoren IC-motorføreren Brugt. Motordriverens ben 3,6 & 11, 14 er forbundet til jævnstrømsmotoren. Indgangsstiften 1 og 2 er forbundet til arduino-modulet, og aktiveringsstiften er forbundet til sendestiften på arduinoen. Stifterne 4, 5, 12, 13 på motordriveren er forbundet med jorden.

Motor Driver IC
Ultralydssensor
I dette koncept ultralydssensoren bruges til at opdage en forhindring forude, og den sender kommandoen til arduino-tavlen. Afhængigt af indgangssignalet omdirigerer mikrokontrolleren robotten til at bevæge sig i alternative retninger.

Ultralydssensor
Anvendelserne af arduino-robot forhindring af forhindringer
- Arduino-robotten kan bevæge sig på enhver overflade
- Det kan bevæge sig på en metaloverflade som et køleskab.
Nedenstående billede viser arduino-robotten til forhindring af forhindringer

Arduino-robot til forhindring af forhindringer
At bygge en robot med 8051-mikrocontrolleren vi forklarer om metaldetektor-robotkøretøjet. Komponenterne, der kræves for at bygge robotten med 8051-mikrocontrolleren er
- 8051 mikrokontroller
- DC-motorer
- Motordrivere
- Metaldetektor
- Dekoder
- Koder
- Tryk på knapper
- Krystal
- RF-sender og modtager
Metaldetektor
Det metaldetektor er en spole, den har en eller flere metalspoler, der bruges til at detektere metallerne på jorden. Metaldetektoren fungerer på princippet om den elektromagnetiske induktion. Metaldetektoren er forbundet til robotlegemet gennem printkortet, som vi kan se i det sidste billede. Det følgende billede viser den generelle metaldetektor, der bruges i de elektroniske projekter.

Metaldetektor
Skub knapper
Trykknapperne er knapper, der består af hårde metaller som plast og metal. Generelt bruges trykknapperne til at nulstille programmet i mikrocontrolleren. Det følgende billede viser trykknapbilledet.

Trykknap
8051 Mikrocontroller
Det 8051 mikrokontroller består af 40 ben . 4. og 5. pin på mikrocontrolleren er forbundet til krystaloscillatoren. Vcc-stiften gives til strømforsyningen på 5V, og jordstiften er forbundet til jorden. Stifterne 15, 16, 18, 19 på mikrocontrolleren er forbundet til koderen IC på HT12E. Mikrocontrollerstifterne 2, 7, 8, 9 er forbundet til trykknapperne.
Følgende billede efter tilslutning af alle komponenter som modstand, kondensator, krystaloscillator, 8051-serie mikrokontroller, kodere og osv. Er på printkortet .

PCB-forbindelser
Nedenstående billede viser metaldetektorrobotten med 8051-serien mikrocontroller.

Metaldetektorrobot med 8051-serie mikrocontroller
I denne artikel har vi diskuteret om Sådan bygger du en robot med arduino og 8051 Microcontroller . Jeg håber, at du ved at læse denne artikel har fået nogle grundlæggende viden til at bygge en robot. Hvis du har spørgsmål om denne artikel eller om elektronikken og kommunikationsprojekter , er du velkommen til at kommentere i nedenstående afsnit. Her er spørgsmålet til dig, Hvad er en 8051-serie mikrocontroller?
.