Robotter kan bruges i mange applikationer i industrier, militære, indenlandske. En af de vigtigste anvendelser af robotter er et aktiv for mennesker. Uanset om det er nogen form for farlige situationer som en brand, der bryder ud eller et sted fyldt med landminer, kan robotter let finde en vej ud af disse problemer. Så lad os se disse to typer robotter - En landmine-senserende robot og en brandbekæmpelsesrobot
Land Mine Sensing Robot
Hvordan kan man fornemme landmine med robotter?
En af de vigtigste anvendelser af robotteknologi er i forsvaret. En robot i militæret er et fjernstyret køretøj med mange unikke funktioner. Det kan være et robotkøretøj med et kamera til spion, et robotkøretøj med en LASER-pistol til at opdage og ødelægge mål eller en robot med en metaldetektor for at opdage tilstedeværelsen af landminer.
En af de traditionelle og konventionelle måder til minedetektion er brugen af uddannede kontaktannoncer, der manuelt søger efter metaller eller miner ved hjælp af en metaldetektor. Dette er dog usikkert og dyrt og også langsomt.
For at løse dette problem foretrækkes et langt mere avanceret system.
Et par måder at opdage landminer på:
- Ved hjælp af en robot, der kan indsætte en sonde i jorden, der kan registrere genstande under jorden og bestemme typen af materiale.
- Brug af en robot med en metaldetektor, der kan mærke tilstedeværelsen af ledende elementer som landminer og alarmere brugeren.
Inden vi går nærmere ind på detaljer om den anden type - dvs. robotten med en metaldetektor, skal vi få en kort tilbagekaldelse af de to vigtige udtryk - Landminer og metaldetektor.
TIL Land mine er en eksplosiv anordning, der bevidst er placeret under jorden og eksploderer, når den udløses af tryk. Ifølge en statistisk rapport er der omkring 100 millioner landminer i 70 lande over hele verden. En landmine, når den er placeret, kan arbejde op til 50 år. Er det ikke farligt !!

En grundlæggende metaldetektor fungerer på princippet om faradays lov om induktion. Den består af en spole, der får energi til at udvikle et pulserende magnetfelt omkring det. Når spolen kommer i nærheden af et ledende element som metal (en mine) induceres en elektrisk strøm (virvelstrøm) i den. Den inducerede virvelstrøm forårsager udvikling af det elektromagnetiske felt omkring metallet, som transmitteres igen til spolen, der udvikler et elektrisk signal, der analyseres. Større er afstanden mellem spolen og metallet, svagere er magnetfeltet.
En simpel prototype:

En simpel prototype af robotkøretøj med metaldetektor
Design af robotten:
Robotkøretøjet består af følgende enheder:
- En rektangulær base, der understøtter hele robotstrukturen, fastgjort med to hjul til bevægelse.
- Et par jævnstrømsmotorer til at levere krævet bevægelse til robotten.
- En styreenhed bestående af en RF-modtager, der modtager kommandosignaler fra en senderenhed til at styre motordriveren og styre motorerne i overensstemmelse hermed.
- Et metaldetektorkredsløb sammen med en summeralarm udløses, når metallet opdages.
Hvordan fungerer robotten:
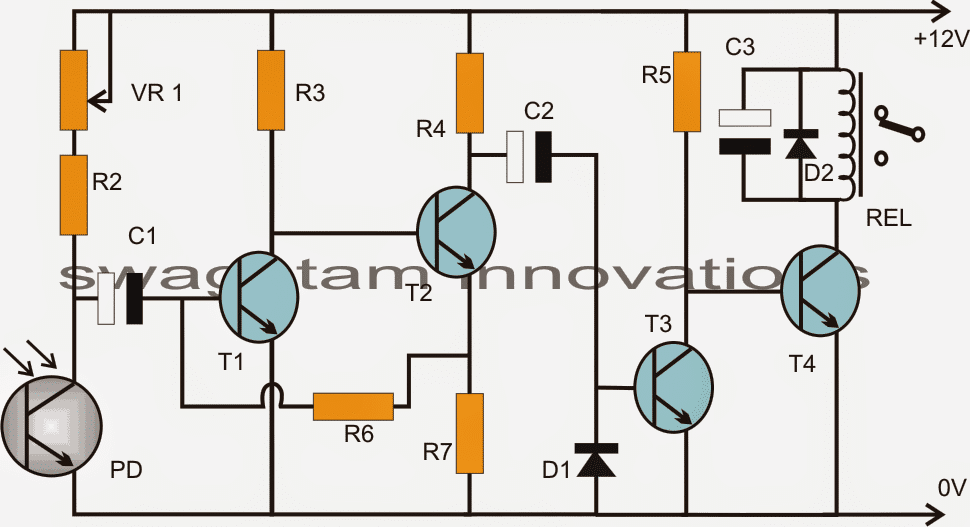
Metaldetektorkredsløbet indlejret i robotstyringskredsløbet består af en transistor, der drives af et indstillet oscillatorkredsløb, der består af spolen. Når et metal detekteres, og den elektriske strøm transmitteres igen gennem spolen, er transistor1 i tilstand og driver en anden transistor2 til slukket tilstand. Denne transistor3 driver igen en anden transistor til slukket tilstand. Denne særlige transistor 3 er forbundet til en anden transistor4, som er forbundet sådan, at den er i tilstand, når dens drivertransistor 3 er i slukket tilstand. Transistoren 4 er forbundet således, at summeren og lysdioden i tilstanden får den rette forspænding og begynder at lede.

Blokdiagram over metaldetektorenhed
LED'en begynder at lyse, og summeren begynder at ringe. Således når et metal detekteres, vil alarmen begynde at ringe, og LED'en vil lyse.
Styring af robotten:
Den enkle prototype kan styres ved hjælp af RF-kommunikation, som er et kortdistancekommunikationssystem. Kommandoerne transmitteres ved hjælp af en sender og modtages af en modtager indlejret i robotkredsløbet for at kontrollere robotens bevægelse.

Blokdiagram for afsendersektionen
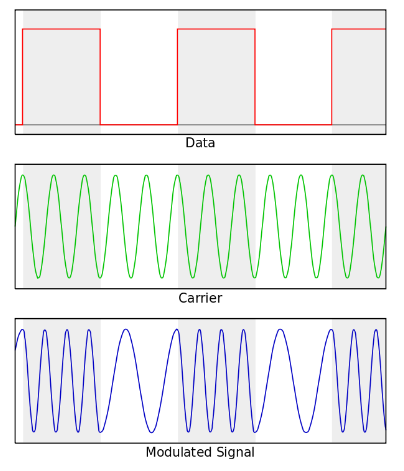
Senderen består af et sæt trykknapper som frem, tilbage, stop, venstre og højre, der trykkes for at give robotten bevægelse i en hvilken som helst ønsket retning. Trykknapperne er tilsluttet mikrocontrollerens indgangsport. Ved modtagelse af disse signaler udvikler mikrokontrolleren et tilsvarende 4-bit signal i parallel form over en anden I / O-port, hvortil en indkoder IC er forbundet. Koderen konverterer disse signaler til en seriel form for data. RF-senderen modulerer disse serielle data, der transmitteres gennem antennen.

Blokdiagram over modtagersektion
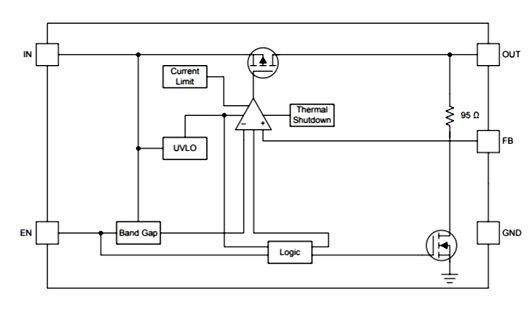
Modtagersektionen monteret på robotten består af RF-modtageren, der demodulerer dette signal. Dekoderen IC modtager dette signal i seriel form og udvikler en tilsvarende 4 bit parallel data ved dets output. Mikrocontrolleren modtager disse data og giver følgelig et styresignal til motordriveren IC LM293D, som driver begge motorer.
Brandbekæmpelsesrobot:
Begrebet brandbekæmpelse robotkøretøj kæmper i ild. I de senere år har der været flere alvorlige ulykker, herunder brand- og bombeeksplosioner. Vi har vidst om større brandulykker som atomkraftværker, petroleum, gastank og kemiske fabrikker, store brandindustrielle virksomheder på dette sted, der engang startede branden, kan resultere i, at det er meget alvorligt. Tusinder af mennesker er døde i denne forekomst. Det er en brandslukning robotkøretøj teknologi. Dette robotkøretøj plejede at finde ilden og kæmpe for brande.

Brandbekæmpelse robotkøretøj
Arbejdsprincip for brandbekæmpelsesrobot:
Robotkøretøjet fyldt med et vandtankskib. Pumpen styres af trådløs kommunikation (RF og mobil kommunikation). Senderen er forbundet med trykknapperne. Ved hjælp af denne trykknap sendes kommandoer til modtageren og kontrolmomentet for den robotlignende fremad, bagud, venstre, højre. Den modtagende ende er tilsluttet tre motorer til mikrokontrolleren.

Transmitterblokdiagram

Modtagerblokdiagram
RF-sender fungerer som RF-fjernbetjening, hvor rækkevidden er 200 meter. I hjemmet, kontorer og industrier opbevares brandsensorerne visse steder, når der opstår brand i nærheden af en brandsensor. Sensorerne er en fornemmelse af, at den tilsvarende bit transmitteres til RF-modtageren. RF-modtageren er integreret med en mikrocontroller. Når RF-modtageren modtager signalerne om, at informationen overføres til mikrokontrolleren, bevæger robotten sig mod brandsensorer. Sensorernes placeringer er gemt i mikrocontrolleren. Når robotten når det ønskede sted, standser robotten og aktiverer sprøjten til den ild. Efter affyringen går robotten til udgangspositionen. Hele kredsløbet styres af mikrocontrolleren.
Typer af brandslukningskøretøjer:
Hjem Brandslukning Robotkøretøj :
Markhandling er begrænset til den nuværende Flore of house. Denne robot bruger mange husholdningsartikler til at tage fyr, når nogen sover eller er væk. Denne robot bruges til at sikre hjemmet, og ved hjælp af denne applikation åbnes alle døre i Flore, fordi dette køretøj flytter et sted til et andet sted i hjemmet. Brandslukningsområdet skal være sikkert for ikke at forårsage en ny ulykke. Den ekstra funktion ved denne robot er at køre på lang afstand.
Industriel brandbekæmpelse:
De fleste industrier står over for en brandulykke problemer som gas, benzin, atomkraftværker, kemiske industrier enorme mængder af skader, og flere mennesker er døde i nærheden af omkringliggende områder. Denne robot har styrken til at bære ild rundt i det brændende område for at levere ubegrænset vand. Brand forårsager nedsat synlighed, ekstrem varme og mange flere situationer, der kan føre til kvæstelser.
Skovbrandbekæmpelse:
Skovbrande er meget farligt. Det kan være kort tid at brænde en stor mængde skovareal. Selv byens brandvæsener skal håndtere skovbrande i området omkring byen. For nogle år siden blev omkring 152 brandmænd dræbt i 1990'erne. Skovbrandrobotikken bruger til at tage ilden og kæmpe i brand. Denne robot bruger en ekstern kontrolenhed til trådløs kommunikationsformål. Modulet er forbundet med udgangsenden, der bruges til skovbrandslukning af robotten. Applikationerne som trykføler, temperaturføler, smogføler, infrarød sensor bruges til styring af skovbrandslukningsrobotten.
På det hurtige!
Mens jeg har givet en grundlæggende idé om robotten med en metaldetektor, findes der stadig et stort spørgsmål - Hvordan man styrer robotten på ujævne terræn, der er ukendte, især i miljøer, der udsættes for kraftige regn, støv og varme temperaturer. For at finde et svar og skriv dine kommentarer.