Indlægget diskuterer et elektronisk motorhastighedsregulator eller controller kredsløb ved hjælp af en RPM feedback signal loop gennem et hall effekt sensor netværk. Imsa Naga anmodede om ideen.
Kredsløbsmål og krav
- Mange tak for din tid. Jeg tror, dette kredsløb ville være egnet til en enfaset forsyning. Min generator er 3-faset 7KvA, og jeg vil gerne parre den med en dieselmotor med en accelerator i stedet for en hastighedsregulator.
- Hvad jeg gerne vil implementere er - En 'ELEKTRONISK MOTORHASTIGHEDSGOVERNOR', som sandsynligvis ville have en elektronisk servostyret mekanisme, såsom - Et hastighedssensorkredsløb (motor RPM-sensor) til at drive en servomotor for at aktivere acceleratormekanismen for at opretholde en konstant motorhastighed i forhold til den belastning, der påføres generatoren.
- Dette vil hjælpe med at bevare frekvensen såvel som generatorens spænding. Jeg ville være i stand til at tage sig af det mekaniske aspekt, hvis du venligt designer et kredsløb til at styre servomotoren på en sådan måde, at den kan drejes til begge retninger med hensyn til ændringen i motorens omdrejningstal. Mange tak i forventning.
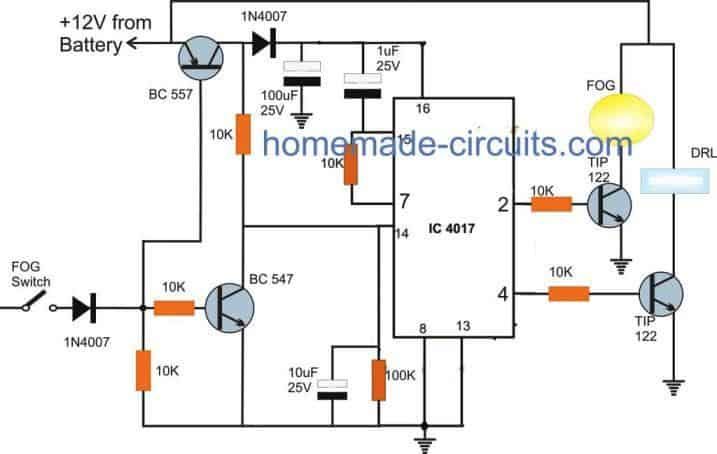
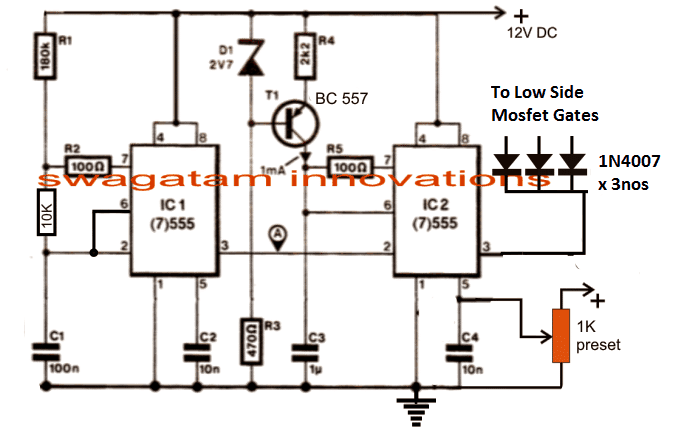
Kredsløbsdiagram

BEMÆRK: MOTOREN KUNNE UDSKIFTES MED EN 12 V FJEDER FYLDT SOLENOID
Designet
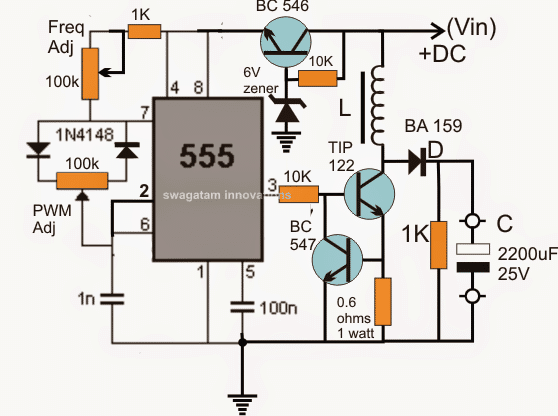
Kredsløbet til en dieselmotorhastighedsregulator eller controller kan ses i ovenstående figur ved hjælp af en feedback RPM-processor eller en omdrejningstællerkredsløb
Venstre IC1 555-trin danner et simpelt omdrejningstællerkredsløb, der er konfigureret med en Hall-effekt sensor fastgjort med motorens lasthjul for at registrere sin omdrejningstal.
RPM konverteres til en forholdsmæssigt varierende pulsfrekvens eller frekvens og påføres ved bunden af en BJT til at skifte stift nr. 2 på IC1.
Kredsløb
IC1 er grundlæggende rigget i monostabil tilstand, hvilket får dens output til at generere en proportionalt justerende ON / OFF switch, hvis periode er indstillet ved hjælp af den viste 1M pot.
Outputtet fra IC1, der bærer RPM-indholdet i form udvidede timede impulser, udjævnes tilstrækkeligt af et integratortrin, der består af et par RC-komponenter ved hjælp af modstand 1K, 10K og 22uF. 2.2uF kondensatorer.
Dette trin konverterer monostabels grove RPM-data til en rimeligt varierende eller eksponentielt varierende spænding.
Denne eksponentielt varierende spænding kan ses forbundet med pin nr. 5 i det næste IC2 555 trin konfigureret som et astabelt kredsløb.
Funktionen for denne astable er at generere en meget smal eller lav PWM-output ved sin pin # 3 under normale driftsforhold.
Her henviser normal driftsbetingelse til situationen, hvor den registrerede RPM er inden for den specificerede grænse, og pin nr. 5 i IC2 ikke får noget spændingsindgang fra emitterfølgeren. Denne lave PWM-udgang kan implementeres ved passende at justere de to 100k modstande og 1uF kondensatoren forbundet med IC2 pin # 6/2 og pin # 7.
Denne lave PWM fra pin nr. 3 i IC2 er ikke i stand til at skifte TIP122 tilstrækkeligt hårdt, og derfor er den angivne motorhjulsamling ikke i stand til at få det krævede momentum og forbliver derfor deaktiveret.
Når omdrejningstallet begynder at stige, begynder omdrejningstælleren imidlertid at producere en eksponentielt højere spænding, hvilket igen medfører en forholdsmæssigt stigende spænding ved pin nr. 5 i IC2.
Dette giver TIP122 efterfølgende mulighed for at lede hårdere, og den tilsluttede motor kan få tilstrækkeligt drejningsmoment, så den begynder at trykke på den vedhæftede speederpedal mod decelerationstilstand.
Denne procedure tvinger dieselmotoren til at reducere sin hastighed, hvilket tilsvarende får omdrejningstælleren og PWM-stadierne til at genoprette deres oprindelige forhold og håndhæve den krævede kontrollerede hastighed for dieselmotoren.
I stedet for det viste acceleratormotorarrangement kunne opsamleren af TIP122 alternativt være kablet med CDI-enhed af dieselmotoren til en identisk hastighedsreduktion for at lette en solid state og mere pålidelig implementering af den diskuterede elektroniske motorhastighedsregulering eller elektroniske motorhastighedsregulator kredsløb.
Sådan opsættes
Oprindeligt skal IC1, IC2-trin være afbrudt ved at fjerne emitterfølgerlinket med pin nr. 5 i IC2.
Dernæst skal du sørge for, at de to 100k modstande ændres korrekt og justeres således, at pin nr. 3 på IC2 genererer de smalleste mulige PWM'er (@ ca. 5% ON-tidsrate).
Brug derefter en 0 til 12V justerbar strømforsyning , anvend en varierende spænding ved pin nr. 5 i IC2 og bekræft en forholdsmæssigt stigende PWM ved pin nr. 3.
Når den astable sektion er testet, skal omdrejningstælleren kontrolleres ved at anvende en kendt RPM-impuls svarende til den ønskede over-limit RPM. Under justeringen forudindstilles emitterfølgerens BJT-base, således at dens emitter er i stand til at generere mindst 10V eller et niveau, der er nok til, at IC2 PWM producerer det krævede drejningsmoment på den tilsluttede pedalstyringsmotor.
Efter yderligere justering og eksperimentering kan du forvente at opnå den krævede automatiske hastighedskontrol for motoren og belastningen forbundet med den.
OPDATER
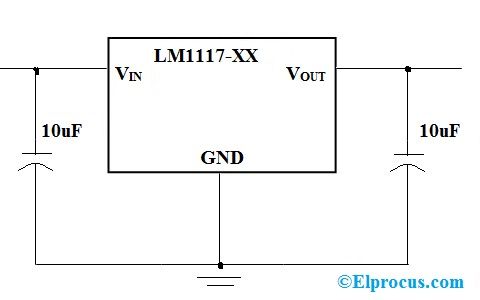
Hvis motoren udskiftes med en fjederbelastet solenoid, kan ovenstående design være meget forenklet som angivet nedenfor:

Magnetakslen kunne kobles med speederen til opnåelse af den tilsigtede automatiske motorhastighedsregulering.
For flere muligheder med hensyn til frekvens til spændingsomformer, kan du henvise til denne artikel .
Forrige: Timerstyret Fitness Gym Application Circuit Næste: Opladning af batteri med Piezo Mat Circuit