En induktionsmotor er en vekselstrømsmotor, den er også navngivet som en asynkron motor . Rotoren i denne motor har en elektrisk strøm, der genererer drejningsmoment fra en elektromagnetisk induktion gennem det roterende magnetfelt i statorens vikling. Rotortypen i induktionsmotoren er en sårtype af egernbur. De vigtigste egenskaber ved denne motor er kravling og tandhjul. Disse er hovedsageligt opstået på grund af motorens ukorrekte funktion, hvilket betyder, at motoren kører med mindre hastighed, ellers bruger den ikke belastningen. Denne artikel diskuterer en oversigt over Crawling og Cogging af induktionsmotor
Crawling og cogging af induktionsmotor
Krypning og cogging af en induktionsmotor vil ikke gå hurtigere, fordi motorens coggingkarakteristik overhovedet ikke vil gå hurtigere & motorens crawlingskarakteristik stopper med at accelerere med en bestemt hastighed. Denne acceleration kan styres gennem drejningsmoment i motoren.

Crawling og cogging af induktionsmotor
Cogging af induktionsmotor
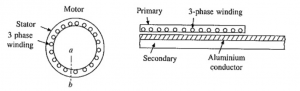
Det stator og rotor på induktionsmotoren inkluderer et sæt slots. Antallet af disse slots bør ikke være det samme, fordi der er en chance for, at motoren holder op med at køre på grund af tandhjulskarakteristikken. Af denne grund er antallet af slots i rotoren og rotoren ikke ens, men der er en ændring for slotfrekvenserne, der svarer gennem harmoniske frekvenser for at forårsage drejningsmoment moduleringer . Slotsene er snoet for at opretholde en overlapning over alle slots for at mindske dette problem.
Hvad er metoderne til at overvinde cogging?
Der er forskellige metoder, der kan anvendes til at løse tandhjulsproblemet.
- Antallet af slots i statoren såvel som rotoren bør ikke være lig.
- Arrangementet af forskydning af rotorslidser kan ske på en sådan måde, at det kan vinkles gennem rotationsaksen.
Gennemgang af induktionsmotor
Det andet kendetegn ved en induktionsmotor er kravling. Spalten i motoren kan udvikles med harmoniske strømninger på grund af induktionsmotorens magnetfelt. Det harmonisk Flux i motoren skaber et ekstra momentfelt.
En almindelig fejl, der kan opstå på grund af den syvende harmoniske, vil skabe et fremadrettet drejningsmomentmagnetfelt ved 1 / 7th hastighed af det synkrone. Motorens maksimale drejningsmoment er lige under 1/7 Ns. Hvis det er tilstrækkeligt højt, er nettomomentet højere sammenlignet med drejningsmomentet på grund af linjefrekvensen, uanset hvor slip ved 1/7 Ns er højt. Når motorens synkrone hastighed er under 1/7, kan der opstå kravling.
Årsager til at kravle i induktionsmotor
Crawling i en induktionsmotor kan skyldes nogle årsager, der inkluderer følgende.
- Det kan forårsages på grund af tilstedeværelsen af rumharmonikker inden for luftgabstrømmen.
- Harmoniske luftspalter kan forekomme på grund af ujævn deling af Stator-viklingen.
- Forskellen i luftspaltets modvilje kan forekomme på grund af spalterne i Stator & Rotor.
Hvordan undgår man at kravle i induktionsmotor?
I en induktionsmotor er kravling mindre på grund af det høje startmoment. Så kravling og tandhjul i burrotormotor kan undgås ved passende valg af spolespænding og bøjning af rotorens tænder lidt. Så gennemsøgning kan undgås eller minimeres ved at vælge den rigtige kombination af sporene til stator og rotor
Således handler det kun om en oversigt over gennemsøgning og tandhjul af induktionsmotoren . Gennemsøgning af denne motor kan forekomme ved den del af den nominelle hastighed, mens tandhjulet af denne motor kan forekomme, hvis nej. af statorslidser er vigtige flere af rotorslidser. Her er et spørgsmål til dig, i hvilken motor, crawling & cogging er ikke dominerende?