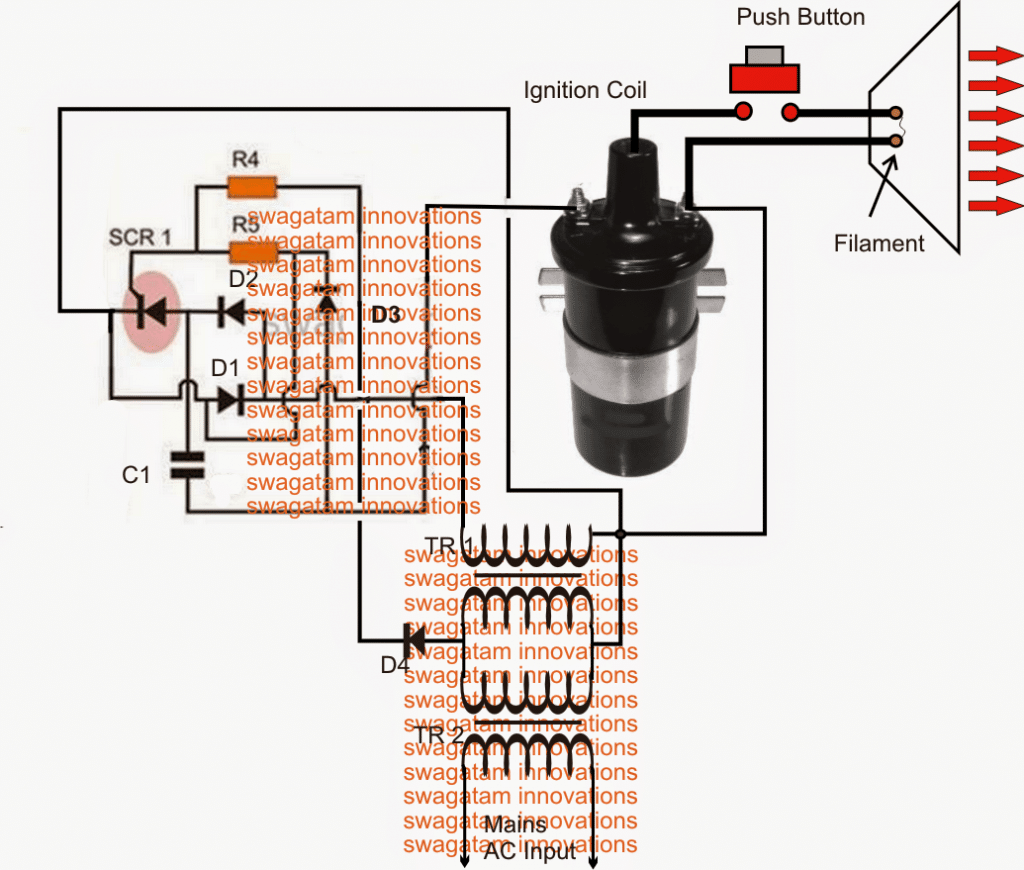
I biler eller biler er LED'er blevet det foretrukne valg af belysning. Uanset om det er de bageste baglygter eller kontrollampeindikatorerne i klyngen som angivet i figur 1 nedenfor, indeholder alle LED'er i dag. Deres kompakte dimensioner hjælper med alsidighed i design og giver den potentielle mulighed for at være lige så holdbar som køretøjets forventede levetid.

Figur 1
På den anden side, selvom lysdioder er meget effektive enheder, er de sårbare over for forringelse fra uregulerede spændings-, strøm- og temperaturparametre, især i det barske biløkosystem.
For at være i stand til at forbedre LED-lyseffektivitet og varighed, LED driver kredsløb design kræver forsigtig analyse.
Elektroniske kredsløb, der anvendes som LED-drivere, bruger grundlæggende transistorer. En standard kredsløbstopologi, der ofte bruges i LED-drivere, er tilfældigvis den lineære topologi, hvor transistoren er designet til at arbejde inden for det lineære område.
Denne topologi giver os mulighed for at lave driverkredsløb kun gennem transistorer eller ved hjælp af specialiserede IC'er med indbyggede transistorer og yderligere LED-forbedringsfunktioner.
I diskrete applikationer er bipolære junction transistorer (BJT'er), som er meget tilgængelige råvareprodukter, tendens til at være favoritten.
På trods af at BJT'er er enkle at konfigurere fra et kredsløbssynspunkt, kan der findes store komplikationer, mens der oprettes en total LED-driverløsning, der opfylder den aktuelle kontrolnøjagtighed, PCB-dimension, varmestyring og fejldiagnose, hvilket er et par vigtige forudsætninger i hele hele forsyningsspændingen og temperaturområdet.
Desuden, som den antallet af lysdioder øges , kredsløbsdesign ved hjælp af diskrete BJT-trin bliver endnu mere sofistikeret.
Sammenlignet med diskrete dele, anvendende IC-baserede alternativer synes at være mere praktisk med hensyn til kredsløbets layout, men desuden design- og evalueringsprocedurerne.
Derudover kan det generelle middel måske være endnu mere overkommeligt.
Parametre til design af LED-drivere til biler
Derfor, når du designer LED-driverkredsløb til en bilbelysning anvendelse, er det vigtigt at overveje LED-kontaktpunkter, evaluere kredsløbsdesignalternativer og faktorer i systemkrav.
En LED er faktisk en P-type N-type (PN) krydsdiode, der gør det muligt for strømmen kun at bevæge sig gennem den i en enkelt retning. Strøm begynder at strømme, så snart spændingen over LED'en når minimum fremadspænding (VF).
Niveauet for belysning eller lysstyrken på en LED bestemmes af fremadgående strøm (HVIS), mens hvor meget strøm en LED bruger, afhænger af den spænding, der påføres over LED'en.
Selvom LED-lysstyrken og fremadstrøm IF er lineært relaterede, kan selv en lille stigning i fremadspændingen VF over LED'en udløse en hurtig eskalering i LED-indgangens strømindtag.
Lysdioder med forskellige farvespecifikationer har forskellige VF- og IF-specifikationer på grund af deres specifikke halvlederingredienser (figur 2). Det er nødvendigt at tage hver LEDs databladspecifikationer i betragtning, specielt mens der anvendes forskellige farve-LED'er i et enkelt kredsløb.

Figur # 2
For eksempel når man udvikler sig med rød-grøn-blå (RGB) belysning , kan en rød lysdiode komme med en fremadrettet spænding på ca. 2 V, mens den samme for en blå og grøn LED kan være omkring 3 til 4 V.
I betragtning af at du betjener disse lysdioder fra en enkelt fælles spændingsforsyning, har du muligvis brug for en godt beregnet strømbegrænsende modstand for hver af de farvede lysdioder for at undgå LED-forringelse.
Termisk og energieffektivitet
Bortset fra forsyningsspænding og aktuelle parametre kræver temperatur og energieffektivitet ligeledes omhyggelig analyse. Selvom det meste af strømmen, der påføres over en LED, konverteres til LED-lys, omdannes en lille mængde strøm til varme inden for enhedens PN-forbindelse.
Temperaturen, der genereres over et LED-kryds, kan blive alvorligt påvirket af nogle få eksterne parametre, såsom:
- ved atmosfærisk temperatur (TA),
- ved den termiske modstand mellem LED-forbindelsen og den omgivende luft (RθJA),
- og ved strømafbrydelse (PD).
Den følgende ligning 1 afslører spændingsspecifikationen PD for en LED:
PD = VF × IF ------------ Eq # 1
Ved hjælp af ovenstående kan vi yderligere udlede følgende ligning, der beregner krydsetemperaturen (TJ) på en LED:
TJ = TA + RθJA × PD ---------- Lign # 2
Det er vigtigt at bestemme TJ ikke kun under normale arbejdsforhold, men også under en absolut maksimal omgivelsestemperatur TA for designet med hensyn til bekymringer i værste tilfælde.
Når LED-forbindelsestemperaturen TJ stiger, forringes dens arbejdseffektivitet. En LEDs fremadgående IF og junction temperatur TJ skal forblive under deres absolutte maksimale ratings, som klassificeret af databladene for at beskytte mod ødelæggelse (figur 3).

Figur # 3
Udover lysdioderne skal du også tage højde for strømeffektiviteten af modstande og drivelementerne såsom BJT'er og driftsforstærkere (op-forstærkere), specifikt når mængden af diskrete komponenter øges.
Utilstrækkelig effektivitet i førertrinene, LED-tidsperioden og / eller omgivelsestemperaturen, alle disse faktorer kan føre til en stigning i enhedens temperatur, hvilket påvirker BJT-driverens aktuelle output og reducerer LED-lysets VF-fald .
Da temperaturstigningen reducerer lysdiodernes fremadspændingsfald, stiger lysdiodens nuværende forbrugsrate, hvilket fører til en forholdsmæssigt øget strømafbrydelse PD og temperatur, og dette medfører yderligere reduktion i LED's fremadspændingsfald VF.
Denne cyklus med kontinuerlig temperaturstigning, også kaldet 'termisk løbsk', tvinger lysdioderne til at fungere over deres optimale driftstemperatur, hvilket forårsager hurtig nedbrydning og på et eller andet tidspunkt svigt af enheden på grund af et øget niveau af IF-forbrug .
Lineære LED-drivere
At betjene lysdioder lineært gennem enten transistorer eller IC'er er faktisk ret praktisk. Af alle muligheder er den mest enkle tilgang til styring af en LED normalt at forbinde den lige på tværs af forsyningsspændingskilden (VS).
At have den rigtige strømbegrænsende modstand begrænser enhedens strømtrækning og retter et nøjagtigt spændingsfald for LED'en. Følgende ligning 3 kan bruges til at udarbejde seriemodstandsværdien (RS):
RS = VS - VF / IF ---------- Lign # 3
Med henvisning til figur # 4 ser vi, at der anvendes 3 lysdioder i serie, hele spændingsfaldet VF over de 3 lysdioder skal tages i betragtning ved VF-beregningen (lysdioderens fremadstrøm IF forbliver konstant.)

Figur # 4
Selvom dette kan være den enkleste LED-driverkonfiguration, kan det være ret upraktisk i den virkelige implementering.
Strømforsyninger, især bilbatterier, er modtagelige for spændingsudsving.
En mindre stigning i forsyningsindgangen udløser lysdioden til at trække større mængder strøm og følgelig blive ødelagt.
Desuden øger overdreven strømafbrydelse PD i modstanden enhedens temperatur, hvilket kan give anledning til termisk løb.
Diskrete konstantstrøms LED-drivere til applikationer til biler
Når der anvendes en konstant strømfunktion, sikrer den et forbedret strømeffektivt og pålideligt layout. Da den mest udbredte teknik til at betjene en LED er gennem en tænd / sluk-kobling, muliggør en transistor en velreguleret strømforsyning.

Figur # 5
Idet der henvises til figur 5 ovenfor, kan det være muligt at gå efter enten en BJT eller en MOSFET baseret på spændings- og strømspecifikationerne i LED-konfigurationen. Transistorer håndterer let større effekt sammenlignet med en modstand, men er alligevel modtagelige for spændingsop- og nedture og temperaturvariationer. For eksempel, når spændingen omkring en BJT stiger, øges dens strøm også forholdsmæssigt.
For at garantere yderligere stabilitet er det muligt at tilpasse disse BJT- eller MOSFET-kredsløb til at levere konstant strøm på trods af ubalancer i forsyningsspændingen.
Design af LED-strømkilde
Figur 6 til 8 viser en håndfuld strømkildeillustrationer.
I figur 6 genererer en Zener-diode en stabil udgangsspænding i bunden af transistoren.

Strømbegrænsende modstand RZ sikrer en kontrolleret strøm, så Zener-dioden fungerer korrekt.
Zener-diodeoutputtet producerer en konstant spænding på trods af udsving i forsyningsspændingen.
Spændingsfaldet over emittermodstanden RE skal supplere spændingsfaldet på Zener-dioden, derfor transistor justerer kollektorstrømmen, hvilket sikrer, at strømmen gennem lysdioderne altid forbliver konstant.
Brug af en feedback fra Op Amp
I figur 7 nedenfor vises et op-forstærkerkredsløb med en tilbagekoblingssløjfe til fremstilling af et ideelt LED-controller-kredsløb til biler. Feedbackforbindelsen sikrer, at udgangen automatisk justeres, så potentialet, der udvikles ved dets negative indgang, forbliver lig med dets positive referenceindgang.

En Zener-diode er fastspændt for at generere en referencespænding ved den ikke-inverterende indgang på op-forstærkeren. Hvis LED-strømmen overstiger en forudbestemt værdi, udvikler den en forholdsmæssig spændingsmængde over sensormodstanden RS, som forsøger at overgå zener-referenceværdien.
Da dette får spændingen ved den negative inverterende indgang til op-forstærkeren til at overstige den positive reference-zener-værdi, tvinger op-forstærkerens udgang til at slukke, hvilket igen reducerer LED-strømmen og også spændingen over RS.
Denne situation vender igen op-forstærkerens udgang til at tænde tilstanden og aktiverer lysdioden, og denne selvjusterende handling af op-forstærkeren fortsætter uendeligt og sikrer, at LED-strømmen aldrig overstiger det beregnede usikre niveau.

Figur 8 ovenfor illustrerer endnu et feedbackbaseret design udført ved hjælp af et par BJT'er. Her strømmer strømmen ved hjælp af R1, der tænder for transistoren Q1. Strømmen fortsætter med at køre via R2, som løser den korrekte strøm gennem lysdioderne.
Hvis denne LED-strøm gennem R2 forsøger at overstige den forudbestemte værdi, øges spændingsfaldet over R2 også forholdsmæssigt. I det øjeblik dette spændingsfald stiger op til basis-til-emitter-spændingen (Vbe) i transistoren Q2, begynder Q2 at tænde.
At blive tændt Q2 begynder nu at trække strøm gennem R1, hvilket tvinger Q1 til at begynde at slukke, og tilstanden holder selvjustering af strømmen gennem LED'en, hvilket sikrer, at LED-strømmen aldrig går ud over det usikre niveau ..
Det her transistoriseret strømbegrænser med feedback-loop garanterer en konstant strømforsyning til lysdioderne i henhold til den beregnede værdi på R2. I ovenstående eksempel implementeres BJT'er, men det er ikke desto mindre muligt at bruge MOSFET'er i dette kredsløb til applikationer med højere strøm.
Konstant strøm LED-drivere, der bruger integrerede kredsløb
Disse væsentlige transistorbaserede byggesten kunne let replikeres til at betjene flere LED-strenge, som vist i figur 9.

Styring af en gruppe af LED-strenge får hurtigt komponentantalet til at stige, optager højere PCB-plads og bruger mere antal generelle input / output (GPIO) ben.
Desuden er sådanne design dybest set uden lysstyrke- og fejldiagnostiske overvejelser, som er væsentlige behov for de fleste strøm-LED-applikationer.
For at medtage specifikationerne som f.eks. Lysstyrkekontrol og fejldiagnostik kræves der yderligere antal diskrete komponenter og tilføjede designanalyseprocedurer.
LED-designs, der inkluderer højere antal lysdioder , får diskrete kredsløbsdesign til at omfatte et større antal dele, hvilket øger kredsløbets kompleksitet.
For at strømline designprocessen betragtes det som mest effektivt at anvende specialiserede IC'er til at fungere som LED-drivere . Mange af diskrete komponenter som angivet i figur 9 kunne gøres lettere med en IC-baseret LED-driver som afsløret i figur 10.

Figur # 10
LED driver IC'er er specielt designet til at tackle kritiske spændings-, strøm- og temperaturspecifikationer for LED'er og også til at minimere delantal og kortdimensioner.
Desuden kan LED-driver-IC'er have yderligere funktioner til lysstyringskontrol og diagnosticering, herunder over temperaturbeskyttelse. Når det er sagt, kan det også være muligt at opnå de ovennævnte avancerede funktioner ved hjælp af diskrete BJT-baserede designs, men IC'er synes at være et lettere alternativ sammenlignet med dem.
Udfordringer i Automotive LED-applikationer
I mange LED-implementeringer til biler bliver lysstyringskontrol en vigtig nødvendighed.
Da justering af fremadstrøm IF gennem LED'en justerer lysstyrkeniveauet forholdsmæssigt, kan der anvendes analoge designs til opnåelse af resultaterne. En digital metode til LED-lysstyringskontrol er gennem PWM eller pulsbreddemodulation. Følgende detaljer analyserer de to koncepter og viser, hvordan de kan anvendes til LED-applikationer til biler
Forskellen mellem analog og PWM LED lysstyrkekontrol
Figur 11 evaluerer hovedforskellen mellem analoge og digitale metoder til styring af LED-lysstyrke.

Figur # 11
Ved at bruge analog LED-lysstyrkekontrol ændres LED-belysningen gennem størrelsen af den strømende strøm, større strøm resulterer i øget lysstyrke og omvendt.
Men kvaliteten af analog dæmpning eller lysstyrkekontrol er ikke tilfredsstillende, specielt ved lavere lysstyrkeområder. Analog dæmpning er normalt ikke egnet til farveafhængige LED-applikationer, som f.eks.RGB-belysning eller statusindikatorer, da varierende IF har tendens til at påvirke LED'ens farveoutput, hvilket forårsager dårlig farveopløsning fra RGB-LED'erne.
I modsætning, PWM-baserede LED-dæmpere varier ikke lysdioden fremadstrøm IF, snarere styrer intensiteten ved at variere lysdioderne for ON / OFF-koblingshastighed. Derefter bestemmer den gennemsnitlige tændtids-LED-strøm den forholdsmæssige lysstyrke på lysdioden. Det kaldes også driftscyklus (forholdet mellem pulsbredde over PWM's pulsinterval). Gennem PWM resulterer en højere driftscyklus i en højere gennemsnitsstrøm gennem LED'en, hvilket forårsager højere lysstyrke og omvendt.
På grund af det faktum, at du er i stand til finjustering af driftscyklussen til forskellige belysningsområder, hjælper PWM-dæmpning med at opnå et meget bredere dæmpningsforhold i forhold til analog dæmpning.
Selvom PWM garanterer en forbedret lysstyrkekontroloutput, kræver det mere designanalyse. PWM-frekvensen skal være meget højere end hvad vores vision kan opfatte, ellers kan LED'erne ende med at se ud som om de flimrer. Desuden er PWM-dæmpningskredse berygtede for at generere elektromagnetisk interferens (EMI).
Interferens fra LED-drivere
Et LED-lederkredsløb til biler, der er bygget med utilstrækkelig EMI-kontrol, kan påvirke andre tilstødende elektroniske software negativt, såsom generering af summende støj i radio eller lignende følsomt lydudstyr.
LED-driver-IC'er kan helt sikkert give dig både analoge og PWM-dæmpningsfunktioner sammen med supplerende funktioner til at tackle EMI, såsom programmerbar svinghastighed eller udgangskanal faseskift eller gruppeforsinkelse.
LED-diagnostik og fejlrapportering
LED-diagnostik, der inkluderer overophedning, kortslutning eller åbent kredsløb, er en populær designforudsætning, især når applikationen kræver flere LED-funktioner. LED-drivere minimerer risikoen for LED-funktionsfejl og har reguleret udgangsstrøm med større præcision end transistorbaserede diskrete driver-topies.
Sammen med dette inkluderer IC-drivere desuden beskyttelse over temperatur for at sikre højere forventet levetid for lysdioderne og selve førerkredsløbet.
LED-drivere designet til biler skal være udstyret til at opdage fejl, for eksempel en LED åben eller kortslutning. Et par applikationer kan også kræve opfølgningsforanstaltninger for at imødegå en detekteret fejl.
Som et eksempel inkluderer et bilbaglygte-modul et antal strenge af lysdioder til at belyse baglygter og bremselys. I tilfælde af at der opdages en defekt LED-fejl i en af LED-strengene, skal kredsløbet være i stand til at slukke for hele LED-arrayet for at sikre, at yderligere beskadigelse af de resterende LED'er kan undgås.
Handlingen vil også advare brugeren om det ikke-standardiserede nedbrudte LED-modul, der skal afinstalleres og sendes til vedligeholdelse til producenten.
Body Control Modules (BCM)

For at være i stand til at give en diagnosticeringsalarm til bilbrugeren, en intelligent højsideswitch i kropskontrolmodul (BCM) registrerer en fejl gennem baglygteelementet som illustreret i ovenstående figur 12.
Når det er sagt, kan identifikation af en LED-fejl gennem BCM være kompliceret. Lejlighedsvis kan du bruge det samme BCM-kortdesign til at detektere et standard glødepærebaseret kredsløb eller et LED-baseret system, fordi LED-strøm tendens til at være væsentligt mindre i modsætning til glødepæreforbrug, der skelner mellem en logisk LED-belastning.
Konklusion
En åben eller afbrudt belastning kan være vanskelig at identificere, hvis den nuværende sensediagnostik ikke er designet nøjagtigt. I stedet for at have en individuel åben LED-streng bliver det lettere at detektere BCM for at slukke for hele LED-strengens streng for rapportering af en åben belastningssituation. En betingelse, der sikrer, at hvis One-LED-fail så All-LED-fail-kriterium kunne udføres for at lukke alle LED'erne ved detektering af en enkelt LED-fejl. Automatiske lineære LED-drivere inkluderer funktionen, der tillader en one-fail-all-fail-reaktion og kan identificere en fælles fejlbus gennem flere IC-konfigurationer.
Forrige: Sådan dræbes Coronavirus med ozongasgenerator Næste: Diac - Arbejds- og applikationskredsløb