I dette indlæg lærer vi om et simpelt kredsløb, der tillader en manuel justeringsfunktion til gnisttimingen af en motorcykels CDI, enten for at opnå en forudgående tænding, forsinket tænding eller simpelthen en normal tidsindstillet tænding.
Efter en omfattende undersøgelse af emnet lykkedes det mig tilsyneladende med at designe dette kredsløb, som kan bruges af enhver motorcykelrytter til at opnå forbedret hastighed og brændstofeffektivitet ved at justere tændingstiden for køretøjets motor som ønsket afhængigt af dets øjeblikkelige hastighed.
Tænding af gnisttænding
Vi ved alle, at timingen af tændingsgnisten, der genereres inde i en køretøjsmotor, er afgørende med hensyn til dens brændstofeffektivitet, motorens levetid og køretøjets hastighed, forkert tidsbestemte CDI-gnister kan producere et dårligt kørende køretøj og omvendt.
Den anbefalede antændelsestid for gnisten inde i forbrændingskammeret er, når stemplet er ca. 10 grader, efter at det har krydset TDC-punktet (Top Dead Center). Pickup-spolen er indstillet til at svare til dette, og hver gang stemplet når lige før TDC, udløser pickup-spolen CDI-spolen til at affyre gnisten, betegnet som BTDC (før øverste dødcenter.
Forbrændingen udført med ovennævnte proces giver generelt en god motorfunktion og emissioner.
Ovenstående fungerer dog kun pænt, så længe motoren kører med en anbefalet gennemsnitshastighed, men for motorcykler, der er designet til at opnå ekstraordinære hastigheder, begynder ovenstående idé at fungere, og motorcyklen forhindres i at nå de specificerede høje hastigheder.
Synkronisering af gnisttid med forskellige hastigheder
Dette sker, fordi stempelet ved højere hastigheder bevæger sig meget hurtigt, end antændelsesgnisten kan forudse det. Selvom CDI-kredsløbet starter udløseren korrekt og forsøger at supplere stempelpositionen, når gnisten er i stand til at antænde ved tændrøret, har stemplet allerede rejst meget foran TDC, hvilket forårsager uønsket forbrændingsscenarie for motoren. Dette resulterer igen i ineffektivitet, hvilket forhindrer motoren i at nå sine specificerede højere hastighedsgrænser.
For at korrigere antændelsestiden er vi nødt til at fremskynde tændrørsudløsningen lidt ved at kommandere en lidt avanceret udløser til CDI-kredsløbet, og ved lavere hastigheder skal dette simpelthen vendes, og affyringen skal fortrinsvis forsinkes lidt for muliggør optimal effektivitet for køretøjets motor.
Vi vil diskutere alle disse parametre meget detaljeret i en anden artikel, i øjeblikket vil vi analysere metoden, der giver os mulighed for at opnå en manuel justering af tændingstids timing, enten for at gå videre, forsinke eller arbejde normalt i henhold til hastigheden af motorcyklen.
Pickup Timing er muligvis ikke pålidelig nok
Fra ovenstående diskussion kan vi konkludere, at pickup-spole-udløseren ikke kun bliver pålidelig for højhastigheds-motorcykler, og nogle måder at fremme pickup-signalet bliver bydende nødvendigt.
Normalt gøres dette ved hjælp af mikrokontrollere, jeg har forsøgt at opnå det samme ved hjælp af almindelige komponenter, tilsyneladende ser det ud til at være et logisk gennemførligt design, selvom kun en praktisk test kan bekræfte dets anvendelighed.

Design af en elektronisk CDI Advance Retard-processor
Idet der henvises til ovenstående design af det foreslåede justerbare CDI-gnistforløb og retard-timer-kredsløb, kan vi se en almindelig IC 555 og et IC 4017-kredsløb, der er rigget i en standard ' LED chaser lys kredsløb '-tilstand.
IC 555 er indstillet som en astabel, der producerer og fremfører urimpulser til pin nr. 14 i IC 4017, som igen reagerer på disse impulser og producerer en 'hoppende' høj logik over dens output pinouts startende fra pin nr. 3 til pin nr. 11 og derefter tilbage til pin nr. 3.
Et par NPN / PNP BJT'er kan ses på venstre side af diagrammet, disse er positioneret til at nulstille de to IC'er som reaktion på signalerne modtaget fra motorcykelens pickup-spole.
Pickup-spolesignalet tilføres til NPN-basen, som beder IC'erne om at nulstille og genstarte svingningerne, hver gang pickup-spolen registrerer en afsluttet rotation med det tilknyttede svinghjul.
Optimering af IC 555-frekvensen
Nu er IC 555-frekvensen justeret således, at når pickup-spolen detekterer en omdrejning og nulstiller IC'erne, er 555 IC i stand til at producere ca. 9 til 10 impulser, der gør det muligt for IC 4017 at gengive et højt op til sin pin # 11 eller i det mindste op til sin pinout # 9.
Ovenstående kan indstilles til omdrejninger svarende til motorcykelens tomgangshastighed.
Det betyder, at under tomgangshastigheder vil pickup-spolesignalerne give 4017-udgange mulighed for at bevæge sig gennem næsten alle pinouts, indtil den nulstilles tilbage til pin # 3.
Lad os dog nu prøve at simulere, hvad der ville ske ved højere hastigheder.
Svar ved højere køretøjshastighed
Ved højere hastigheder ville pickupsignalerne producere hurtigere signaler end den normale indstilling, og det ville igen forhindre IC 555 i at generere de foreskrevne 10 impulser, så det kan være nu, at det vil være i stand til at generere sige omkring 7 impulser eller 6 impulser ved en givet højere hastighed på køretøjet.
Dette ville igen forhindre IC 4017 i at muliggøre, at hele dets output var høj, i stedet for nu ville det kun være i stand til at lede så langt som pin # 6 eller pin # 5, hvorefter pickupen ville tvinge IC til at nulstille.
Opdel svinghjulet i 10 avancerede / forsinkede divisioner
Fra ovenstående diskussion kan vi simulere en situation, hvor udgangene fra 4017 IC ved tomgangshastigheder deler pickup-svinghjulets rotation i 10 divisioner, hvor de nederste 3 eller 4 pinout-signaler kan betragtes som svarende til de signaler, der kan være forekommer lige før det faktiske pickup-spole-udløsersignal, kunne pinout-højlogikken på pin # 2,4,7 ligeledes simuleres for at være de signaler, der vises lige efter, at den faktiske pickup-coil-triggering er gået forbi.
Derfor kan vi antage, at signalerne ved de nedre pinouts på IC 4017 skal 'fremføre' de faktiske afhentningssignaler.
Da nulstillingen fra pickup'en skubber IC 4017 højt til sin pin # 3, kan denne pinout antages at svare til pickupens normale 'anbefalede' trigger .... mens pinouts, der følger pin # 3, det vil sige pinouts2,4,7 kunne antages at være de signaler, der svarer til de sene signaler eller de 'forsinkede' signaler, med hensyn til de faktiske afhentningsudløsere.
Sådan opsættes kredsløbet
Til dette skal vi først kende den tid, der kræves af afhentningssignalet for at generere hver alternative impuls.
Antag, at du registrerer det til at være omkring 100 millisekunder (en vilkårlig værdi), dette vil betyde, at 555 IC'en skal producere impulser ved sin pin # 3 med en hastighed på 100/9 = 11,11 ms.
Når dette er indstillet, kan vi omtrent antage, at udgangene fra 4017 producerer høj logik på tværs af alle dens udgange, som gradvist vil 'falde tilbage', når pickup-signalerne bliver hurtigere og hurtigere som reaktion på køretøjets hastighed.
Dette ville fremkalde en tilbagevendende 'høj' logik over bunden af pinouts på IC 4017, og derfor ved højere hastigheder ville rytteren få mulighed for manuelt at bruge de nedre sæt pins til at udløse CDI-spolen, som vist i diagrammet (se valgmuligheder).
På figuren kan vi se en omskifter, der kan bruges til at vælge pinout-udløsere fra IC 4017 IC til at udløse CDI-spolen.
Som forklaret ovenfor vil det nedre sæt af tilbagegående pinout-høje logik, når det først er valgt, muliggøre en fremadudløsning af CDI-spolen og således tillade rytteren at opnå en selvjusterende automatisk fremskydning af CDI-spolen, men dette skal kun vælges, når køretøjet kører meget over den anbefalede normale hastighed.
Identisk, hvis rytteren overvejer en lavere hastighed for køretøjet, kan han skifte omskifteren for at vælge den 'retarderede' timingindstilling, der er tilgængelig på tværs af pinouts, der er lige efter pin nr. 3 på IC 4017.
Under de anbefalede normale hastigheder kan motorcyklen vælge pin nr. 3 som udløsende output for CDI, hvilket gør det muligt for køretøjet at nyde en effektiv kørsel ved de givne normale hastigheder.
Ovenstående timing / retard timing-teori blev inspireret af forklaringen som udtrykt i følgende video:
Det originale videolink, som kan ses på Youtube, er angivet nedenfor:
Hvordan man laver ovenstående koncept automatiseret
I det følgende afsnit lærer vi metoden til at opgradere ovenstående koncept til en automatisk version ved hjælp af et omdrejningstæller og et opamp-kredsløb. Ideen blev anmodet af Mr. Mike og designet af Mr. Abu-Hafss.
Tekniske specifikationer
Vær hilset!
Interessante ting her, jeg er i øjeblikket ved at lægge spor på CAD og vil gerne ætse dette på nogle PCB, men jeg vil hellere have valget af forhåndsstandard eller retard tilbage til elektronik ...
Jeg er lidt ny på dette, men har det som om jeg har en ret god forståelse af de begreber, der er i spil ...
mit spørgsmål er, er der nogen artikler, du har om automatisering af forhåndsvalg ud fra motoromdrejningstal? åh og en deleliste over de forskellige komponenter ville være spektakulær ???
Tak, Mike
Designet af Abu-Hafss
Hej Swagatam
Henviser til din artikel om fremad, forsink tænding gnist CDI for at forbedre højhastigheds motorcykel effektivitet , Jeg vil gerne kommentere, at jeg endnu ikke er stødt på nogen situation, hvor RETARDering (eller mere præcist FORSINKELSE) af fyring af gnister er påkrævet. Som du nævnte, udfører de fleste cykler (racercykler) ikke i høj omdrejningstal (typisk over 10.000 omdr./min.), Så det er nødvendigt at skyde gnist i forvejen. Jeg havde næsten samme idé i tankerne, men kunne ikke teste fysisk.
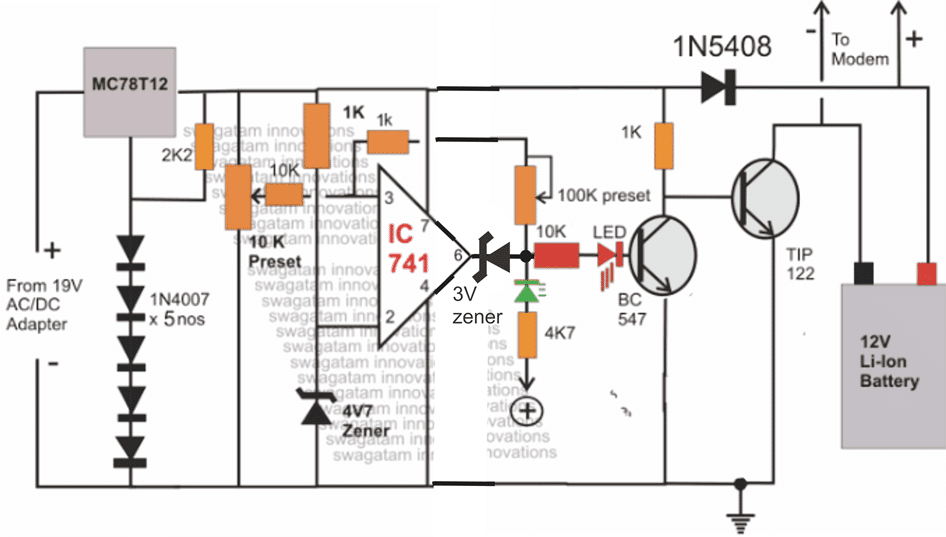
Følgende er min foreslåede tilføjelse til dit kredsløb:
For at automatisere skift af fyring mellem NORMAL og ADVANCE, a omdrejningstællerkredsløb kan bruges med et par flere komponenter. Voltmeteret i omdrejningstællerkredsløbet fjernes, og output føres til pin nr. 2 i IC LM741, som bruges som en komparator. En referencespænding på 10V er tildelt ved pin nr. 3. Omdrejningstællerkredsløbet er designet til at give 1V output mod 1000 RPM, således at 10V refererer til 10.000 RPM. Når RPM er mere end 10.000, har pin nr. 2 mere end 10V, og derfor går output på 741 lavt (nul).
Denne udgang er forbundet til bunden af T2, derfor skifter lav udgang til T2. Hvis RPM er under 10.000, går output højt, og derfor slukkes T2. Samtidig inverterer T4, som er konfigureret som signalinverter, udgangen til lav, og den samme er forbundet til bunden af T3, derfor er T3 tændt.
Hilsen
Abu-Hafss

Forrige: Sådan får du fri energi fra et pendul Næste: Lav 3.3V, 5V spændingsregulator kredsløb med dioder og transistorer