
I dag bliver robotik en af de mest avancerede inden for teknologi. Det anvendelser af robotteknologi hovedsageligt involverer i biler, medicinsk, byggeri, forsvar og også brugt som en brandslukningsrobot at hjælpe folket fra brandulykken. Men det er ret kompliceret at kontrollere robotten med en fjernbetjening eller en kontakt. Så der udvikles et nyt projekt, dvs. en accelerometerbaseret gestusstyringsrobot. Hovedmålet med dette projekt er at kontrollere robotens bevægelse med håndbevægelse ved hjælp af accelerometer.

Accelerometerbaseret Gesture Control-robot
Accelerometerbaseret Gesture Control-robot
Dette projekt inkluderer sendersektion og modtagersektion. Det nødvendige komponenter til at bygge dette projekt er Ht12e, Ht12d, L293D, AT89S52, 7805, kondensator, krystal, PBT-stik, enpolet antenne, modstand, LED, accelerometer og batteri. Accelerometeret er en væsentlig enhed i dette projekt.
accelerometer eller transmitterenhed afhænger af håndbevægelsen. Via senderenhed modtages en kommando, og den behandles ved hjælp af At89S51 mikrokontroller. Det her mikrokontroller giver signal til robotten om at bevæge sig i den foretrukne retning. Det grundlæggende funktionsprincip for dette robotsæt af datasignalerne til transmission af enhedslæsninger til den mikrocontroller, der er monteret i robotten. Den forprogrammerede mikrokontroller kører efter programmet, hvilket får robotten til at fungere i overensstemmelse hermed.
En gestikuleret robot ved hjælp af et accelerometer er en slags robot, som kan betjenes ved håndbevægelse ved at placere et accelerometer på den. Dette projekt er opdelt i to dele sender enhed og modtager enhed. Hvor en gestusenhed fungerer som en transmitterenhed, og en robot fungerer som en modtagerenhed. Når en transmitterende enhed (accelerometer) placeres på hånden, sender den signaler til robotten for den krævede operation.
De vigtigste komponenter, der anvendes i den transmitterende sektion, inkluderer et accelerometer, komparator, HT12E IC-koder og RF-sender .
Accelerometer
Et accelerometer er et type sensor og det giver analoge data, mens de bevæger sig i retning af X, Y og Z. Disse retninger afhænger af sensortypen. Diagrammet over accelerometer er vist nedenfor. Denne sensor består af pilretninger, hvis vi vipper sensoren i en retning, ændres dataene på den bestemte pin i form af analog. Accelerometeret består af seks ben, hvor funktionen af hver pin diskuteres nedenfor.

Accelerometer
- Pin-1: VDD-pin bruges til at give + 5V forsyning til denne pin
- Pin-2: GND-pin er forbundet til jorden med henblik på forspænding
- Pin-3: X-pin modtager dataene i X-retning
- Pin-4: Y-pin modtager dataene i Y-retning
- Pin-5: Z-pin modtager dataene i Z-retning
- Pin-6: ST-pin bruges til at justere accelerometerets følsomhed 1,5 g eller 2 g eller 3 g eller 4 g
Komparator
Komparatoren bruges til at ændre den analoge spænding til digital spænding og sammenligner den analoge spænding med en referencespænding og giver en præcis lav- eller højspænding
Koder
Denne indkoder bruges til at kode 4-bit data og transmitterer ved hjælp af et RF-sendermodul.
RF-sendermodul
RF TX-modulet fungerer med 433MHz frekvens, og dette modul er let tilgængeligt på markedet med lave omkostninger
De vigtigste komponenter, der anvendes i modtagelsessektionen, inkluderer modtager, dekoder, mikrokontroller og motordriver.

Sendersektion
RF-modtager
RF-modtageren i dette projekt modtager de data, der overføres af den transmitterende enhed.
Dekoder
Dekoderen bruges til at ændre serielle data til parallelle data, der modtages fra RF-modtagermodulet.
Mikrocontroller
Det mikrokontroller er den mest vigtige del af robotten. En 8051-familie mikrokontroller bruges i kredsløbet til at give en beslutningskapacitet
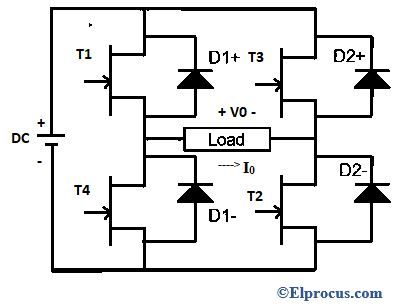
Motorchauffør
Motordriveren er en enhed, der giver bevægelsen mulighed for at udføre en opgave som en motor. Så vi kræver, at motorchaufføren kører dem gennem controlleren. Interfacet mellem motor og mikrocontroller kan udføres ved hjælp af en L293D-motordriver-IC i dette kredsløb.
Ved modtagersektionen modtager et RF-modtagermodul dataene fra senderen. De modtagne data kan dekodes af en IC HT12D. De modtagne data kan behandles af AT89S51 mikrokontroller, og motordriveren bruges til at styre motoren.

Modtagersektion
Gestus kontrol robot arbejder
Accelerometerbaseret gestusstyret robot bevæger sig i henhold til håndbevægelsen, når vi placerer accelerometeret på din hånd. Når vi vipper hånden med et accelerometer foran robotten, begynder robotten at bevæge sig fremad, indtil den næste bevægelse er givet. Når vi vipper hånden bagud, ændrer robotten sin retning og tilstand. Derefter begynder det at bevæge sig bagud, indtil det næste signal gives. Når vi vipper hånd på venstre side, bevæger robotten sig ind i venstre side, indtil det næste signal gives. På samme måde når vi vipper hånden i højre side, så bevæger robotten højre side.
Ansøgninger
Det anvendelser af accelerometeret baseret gestusstyret robot inkluderer
- Disse robotter bruges i militære applikationer til at betjene robotter
- Disse robotter bruges i medicinske applikationer med henblik på operation
- Disse robotter anvendes inden for byggeriet
- Disse robotter bruges i industrier til at kontrollere trolly og lift.
Således handler alt om Accelerometer-baseret gestusstyringsrobot, dens arbejde og applikationer. Vi håber, at du har fået en bedre forståelse af dette koncept. Desuden er enhver tvivl om dette koncept eller elektronikprojekter , giv venligst din feedback ved at kommentere i kommentarfeltet nedenfor. Her er et spørgsmål til dig, hvad er anvendelserne af accelerometerbaseret gestusstyringsrobot?
Fotokreditter:
- Accelerometerbaseret Gesture Control-robot ytimg
- Accelerometer statisk.flickr



{kind=link}
{kind=link}