I dette indlæg diskuterer vi fremstillingen af et simpelt 3-faset induktionsmotorhastighedsregulator kredsløb, som også kan anvendes til en enkeltfaset induktionsmotor eller bogstaveligt talt til enhver form for vekselstrømsmotor.
Når det kommer til styring af hastigheden på induktionsmotorer anvendes normalt matrixkonvertere, der involverer mange komplekse trin, såsom LC-filtre, tovejs-arrays af switche (ved hjælp af IGBT'er) osv.
Alle disse bruges til i sidste ende at opnå et hakket vekselstrømssignal, hvis driftscyklus kunne justeres ved hjælp af et komplekst mikrokontrolkredsløb, og til sidst tilvejebringe den krævede motorhastighedsstyring.
Vi kan dog eksperimentere og forsøge at opnå en 3-faset induktionsmotorhastighedskontrol gennem et meget enklere koncept ved hjælp af de avancerede nulkrydsningsdetektor-optokobler-IC'er, en power triac og et PWM-kredsløb.
Brug af Zero Crossing Detector Opto Coupler
Takket være MOC-serien af optokoblere, der har gjort triac-kontrolkredsløb ekstremt sikre og nemme at konfigurere og muliggør en problemfri PWM-integration til de tilsigtede kontroller.
I et af mine tidligere indlæg diskuterede jeg en simpel PWM blød start motor controller kredsløb som implementerede MOC3063 IC til at give en effektiv softstart på den tilsluttede motor.
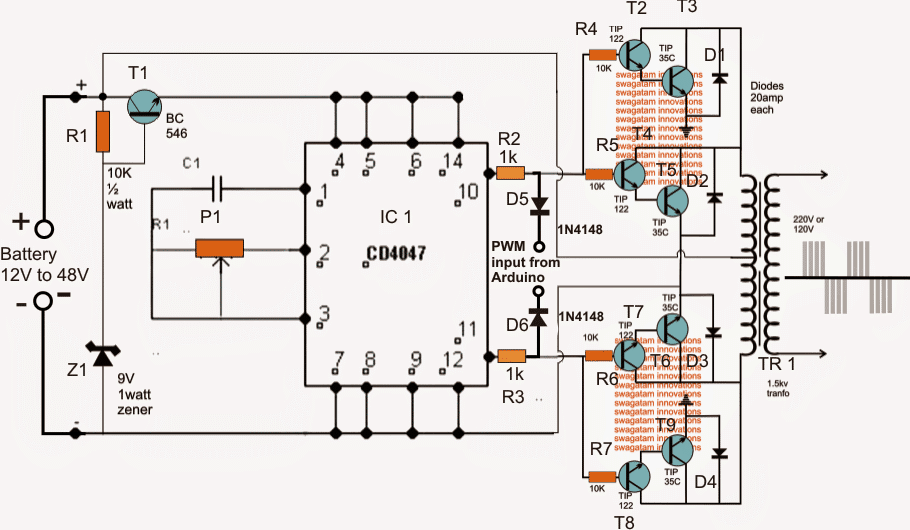
Også her bruger vi en identisk metode til at håndhæve det foreslåede 3-fasede induktionsmotorhastighedsregulator kredsløb, følgende billede viser, hvordan dette kan gøres:
På figuren kan vi se tre identiske MOC-optokoblingstrin konfigureret i deres standard triac regulator-tilstand, og indgangssiden er integreret med en simpelt IC 555 PWM kredsløb .
De 3 MOC-kredsløb er konfigureret til at håndtere 3-faset AC-input og levere det samme til den tilsluttede induktionsmotor.
PWM-indgangen på den isolerede LED-styreside af optoen bestemmer skæreforholdet for 3-faset AC-indgang, der behandles af MOC ICS.
Brug af IC 555 PWM-controller (nul spændingskobling)
Det indebærer ved at justere PWM-pot forbundet med 555 IC man kan effektivt kontrollere induktionsmotorens hastighed.
Output på dens pin # 3 kommer med en varierende driftscyklus, som igen skifter output triacs i overensstemmelse hermed, hvilket resulterer i enten at øge AC RMS-værdien eller reducere den samme.
Forøgelse af RMS gennem bredere PWM'er muliggør erhvervelse af en højere hastighed på motoren, mens reduktion af AC RMS gennem smallere PWM'er giver en modsat effekt, det vil sige, at motoren bremses forholdsmæssigt.
Ovenstående funktioner er implementeret med meget præcision og sikkerhed, da IC'erne er tildelt mange interne sofistikerede funktioner, specielt beregnet til kørsel triacs og tunge induktive belastninger såsom induktionsmotorer, solenoider, ventiler, kontaktorer, solid state-relæer osv.
IC'en sørger også for en perfekt isoleret operation til DC-scenen, som giver brugeren mulighed for at foretage justeringerne uden frygt for et elektrisk stød.
Princippet kan også effektivt bruges til at kontrollere enfaset motorhastighed ved at anvende en enkelt MOC IC i stedet for 3.
Designet er faktisk baseret på tidsproportionalt triac-drev teori. Det øverste IC555 PWM-kredsløb kan justeres til at producere en 50% -cyklus ved meget højere frekvens, mens det nedre PWM-kredsløb kan bruges til at implementere hastighedsreguleringsoperationen af induktionsmotoren gennem justeringerne af den tilhørende pot.
Denne 555 IC anbefales at have relativt lavere frekvens end det øvre IC 555 kredsløb. Dette kan gøres ved at øge pin # 6/2 kondensatoren til omkring 100nF.

BEMÆRK: TILFØJELSE AF PASSEDE INDUKTORER I SERIEN MED FASEKABLERNE KAN DRASTISK FORBEDRE SYSTEMETS HASTIGHEDSKONTROLLERING.
Antaget bølgeform og fasekontrol ved hjælp af ovenstående koncept:

Ovenstående forklarede metode til styring af en 3-faset induktionsmotor er faktisk ret rå, da den har gjort det ingen V / Hz-kontrol .
Det anvender simpelthen at tænde / slukke for lysnettet ved forskellige hastigheder for at producere en gennemsnitlig effekt til motoren og styre hastigheden ved at ændre denne gennemsnitlige vekselstrøm til motoren.
Forestil dig, hvis du tænder / slukker for motoren manuelt 40 gange eller 50 gange i minuttet. Det ville resultere i, at din motor sænkes ned til en relativ gennemsnitlig værdi, men alligevel bevæger sig kontinuerligt. Ovenstående princip fungerer på samme måde.
En mere teknisk tilgang er at designe et kredsløb, der sikrer en korrekt kontrol af V / Hz-forholdet og automatisk justerer det samme afhængigt af slipens hastighed eller spændingsudsving.
Til dette anvender vi grundlæggende følgende faser:
- H-Bridge eller Full Bridge IGBT driver Circuit
- 3-fase generatorstrin til fødning af hele brokredsen
- V / Hz PWM-processor
Brug af et Full Bridge IGBT-kontrolkredsløb
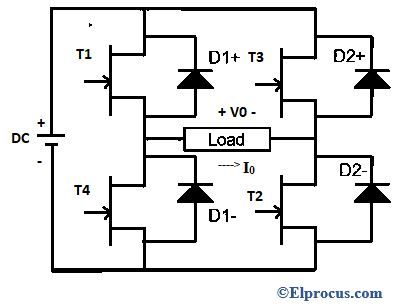
Hvis opsætningsprocedurerne i ovenstående triac-baserede design ser skræmmende ud for dig, kunne følgende fuldbro PWM-baserede induktionsmotorhastighedskontrol blive prøvet:

Kredsløbet vist i ovenstående figur anvender en enkeltchip-fuldbrodriver IC IRS2330 (den nyeste version er 6EDL04I06NT), som har alle de indbyggede funktioner for at tilfredsstille en sikker og en perfekt 3-faset motorbetjening.
IC'en har kun brug for en synkroniseret 3-faset logisk indgang på tværs af HIN / LIN-pinouts for at generere det krævede 3-fasede oscillerende output, som til sidst bruges til at betjene IGBT-netværket med fuld bro og den tilsluttede 3-fasemotor.
Det hastighedskontrol PWM-injektion implementeres gennem 3 separate halvbro NPN / PNP-drivere, styret med et SPWM-feed fra en IC 555 PWM-generator, som det ses i vores tidligere designs. Dette PWM-niveau kan i sidste ende bruges til at kontrollere induktionsmotorens hastighed.
Før vi lærer den faktiske hastighedsreguleringsmetode for induktionsmotoren, lad os først forstå, hvordan den automatiske V / Hz kontrol kan opnås ved hjælp af et par IC 555 kredsløb, som beskrevet nedenfor
Det automatiske V / Hz PWM-processorkredsløb (lukket sløjfe)
I ovenstående afsnit lærte vi designene, der vil hjælpe induktionsmotoren til at bevæge sig med den hastighed, der er specificeret af producenten, men den justeres ikke i henhold til et konstant V / Hz-forhold, medmindre følgende PWM-processor er integreret med H -Bridge PWM input feed.

Ovenstående kredsløb er et simpelt PWM-generator ved hjælp af et par IC 555 . IC1 genererer PWM-frekvensen, der konverteres til trekantbølger ved pin # 6 i IC2 ved hjælp af R4 / C3.
Disse trekantbølger sammenlignes med sinusbølgen ved pin nr. 5 i IC2. Disse prøvebølger erhverves ved at rette 3-faset AC-lysnettet til en 12V AC-krusning og føres til pin nr. 5 i IC2 til den krævede behandling.
Ved at sammenligne de to bølgeformer, en passende dimensioneret SPWM genereres ved pin nr. 3 i IC2, som bliver den drivende PWM for H-bridge-netværket.
Sådan fungerer V / Hz-kredsløbet
Når der tændes for strøm, begynder kondensatoren ved pin nr. 5 med at gengive en nul spænding ved pin nr. 5, som forårsager den laveste SPWM-værdi til H-bro kredsløb , hvilket igen gør det muligt for induktionsmotoren at starte med en langsom gradvis blød start.
Når denne kondensator oplades, stiger potentialet ved pin nr. 5, hvilket forholdsmæssigt hæver SPWM og gør det muligt for motoren at få hastighed gradvist.
Vi kan også se et omdrejningstællerfeedback kredsløb, som også er integreret med pin nr. 5 på IC2.
Det her omdrejningstæller overvåger rotorhastigheden eller sliphastigheden og genererer yderligere spænding ved pin nr. 5 i IC2.
Når motorhastigheden stiger, forsøger glidehastigheden at synkronisere med statorfrekvensen, og i processen begynder den at få hastighed.
Denne stigning i induktionsslip øger omdrejningstællerspændingen forholdsmæssigt, hvilket igen får IC2 til at øge SPWM-output og dette øger igen motorhastigheden yderligere.
Ovenstående justering forsøger at opretholde V / Hz-forholdet til et ret konstant niveau, indtil endelig når SPWM fra IC2 ikke er i stand til at øge yderligere.
På dette tidspunkt får glideshastigheden og statorhastigheden en stabil tilstand, og denne opretholdes, indtil indgangsspændingen eller glideshastigheden (på grund af belastning) ikke ændres. Hvis disse ændres, kommer V / Hz-processorkredsløbet igen i gang og begynder at justere forholdet for at opretholde den optimale respons af induktionsmotorhastigheden.
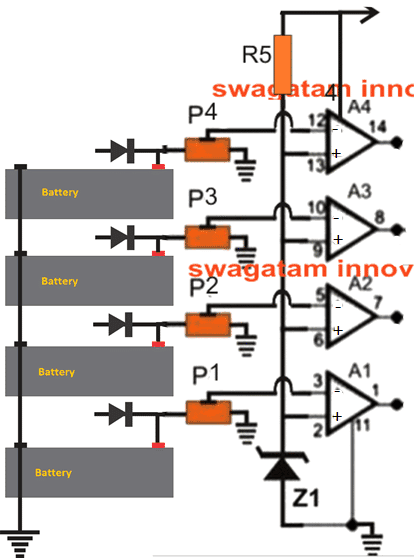
Omdrejningstælleren
Det Omdrejningstællerkredsløb kan også bygges billigt ved hjælp af følgende enkle kredsløb og integreres med de ovenfor forklarede kredsløbstrin:

Sådan implementeres hastighedskontrol
I ovenstående afsnit forstod vi den automatiske reguleringsproces, der kan eb opnås ved at integrere en omdrejningstæller feedback til et automatisk regulerende SPWM-controller kredsløb.
Lad os nu lære, hvordan hastigheden på en induktionsmotor kan styres ved at variere frekvensen, hvilket i sidste ende vil tvinge SPWM til at falde og opretholde det korrekte V / Hz-forhold.
Følgende diagram forklarer hastighedskontroltrinnet:

Her kan vi se et 3-faset generatorkredsløb ved hjælp af IC 4035, hvis faseforskydningsfrekvens kan varieres ved at variere urindgangen ved dens pin # 6.
De 3-fasede signaler anvendes over 4049 IC-porte til at producere de krævede HIN, LIN-feeds til fuldbro-drivernetværket.
Dette indebærer, at ved passende at variere klokkefrekvensen på IC 4035, kan vi effektivt ændre induktionsmotorens 3-fasede driftsfrekvens.
Dette er implementeret gennem et simpelt IC 555 astabelt kredsløb, der føder en justerbar frekvens ved pin nr. 6 i IC 4035, og gør det muligt at justere frekvensen gennem den vedhæftede 100K pot. Kondensatoren C skal beregnes således, at det justerbare frekvensområde ligger inden for den korrekte specifikation for den tilsluttede induktionsmotor.
Når frekvenspotten varieres, ændres den effektive frekvens af induktionsmotoren også, hvilket tilsvarende ændrer motorens hastighed.
For eksempel når frekvensen reduceres, får motorhastigheden til at reducere, hvilket igen får omdrejningstællerudgangen til at reducere spændingen forholdsmæssigt.
Denne forholdsmæssige reduktion i omdrejningstælleroutput tvinger SPWM til at indsnævre og trækker derved spændingsoutputtet til motoren forholdsmæssigt.
Denne handling sikrer igen, at V / Hz-forholdet opretholdes, mens induktionsmotorhastigheden styres gennem frekvensstyring.
Advarsel: Ovenstående koncept er kun designet på teoretiske antagelser, vær forsigtig.
Hvis du er i tvivl om dette 3-fasede induktionsmotorhastighedsregulatordesign, er du meget velkommen til at sende det samme gennem dine kommentarer.
Forrige: Sådan designes et UPS-kredsløb uden afbrydelig strømforsyning Næste: Tænd / sluk for to alternative belastninger med IC 555